
一种最优化瞬态响应的功率控制技术
2013-09-04 02:04:16顾汉清盛胜君
杭州电子科技大学学报(自然科学版) 2013年5期
顾汉清,盛胜君
(中国电子科技集团公司第三十六研究所,浙江嘉兴314033)
0 引言
在大功率发射机中,采用闭环自动电平控制(Automatic Level Control,ALC)实现发射功率的控制,使得发射机在不同环境条件和负载条件下输出功率稳定并达到额定值。ALC的设计需保证在瞬态响应过程中,避免功率放大器由于过激励形成大功率瞬态脉冲造成的损坏;瞬态响应时间设计应遵循在保证发射机工作可靠的条件下尽量快,使发射机能满足不同工作体制如快速跳频通信体制。模拟电路的闭环控制如果未进行最优化设计,虽然响应时间快,但环路响应有较大的幅度过冲(振铃)有可能造成功率放大器损坏。采用DSP的无过冲功率控制技术在宽带功率放大器开环增益平坦度变化很大的情况下,会导致增益小的频点瞬态响应时间过慢,从而影响整个发射机的性能[1,2]。本文阐述了利用开关电容积分放大电路解决大功率发射机ALC电路的过冲问题,电路简单,并采用零极点计算法,得到了环路的穿越频率,利用相位补偿,实现大功率发射机瞬态响应速度和稳定性的最优化。
1 利用开关电容解决发射机过冲问题的方法
传统的ALC闭环控制电路如图1所示,其实现过程如下:输出信号经定向耦合器取样和检波后得到输出电压:

输出电压送去参考比较得到比较电压:

比较电压控制电调衰减器:

经功放放大后,得到:

可以得到:

式5中,K1K4都是常量,所以输出功率大小只是与Vref相关的量,从而形成ALC闭环控制的过程。
由于积分电路零输入响应的直流增益特别大,导致输出ALC初始电压无法收敛,接近于运放的饱和电压,过高的ALC电压使电调衰减器几乎无衰减。所以,上述ALC控制过程初始状态的过冲很难避免。
开关电容积分电路如图2所示。在传统积分电路的基础上引入开关S,使积分电路变成开关电容放大器。在稳态电路分析中,开关S的工作方式是当t=0时闭合,积分电路成了简单的电压跟随器,ALC电压保持一个合理的初始值,当t>0时,开关S打开,形成一个稳定的时域响应,只要环路参数设计得当,环路稳定无振荡,就可以避免过冲的产生。
采用开关电容积分的ALC控制方法,对一个发射通路建模仿真得到的ALC控制电压响应过程如图3所示,电压过冲小于5%,相应的功率过冲小于10%,指标满足工程使用要求。
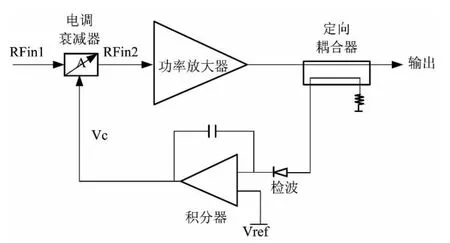
图1 ALC闭环控制电路
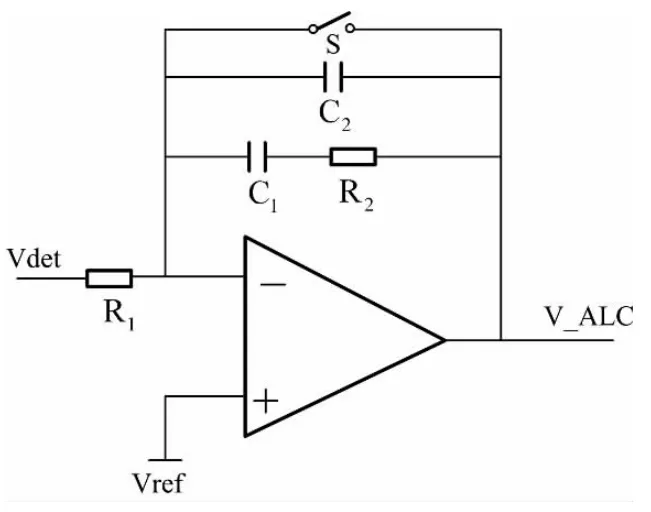
图2 开关电容积分电路
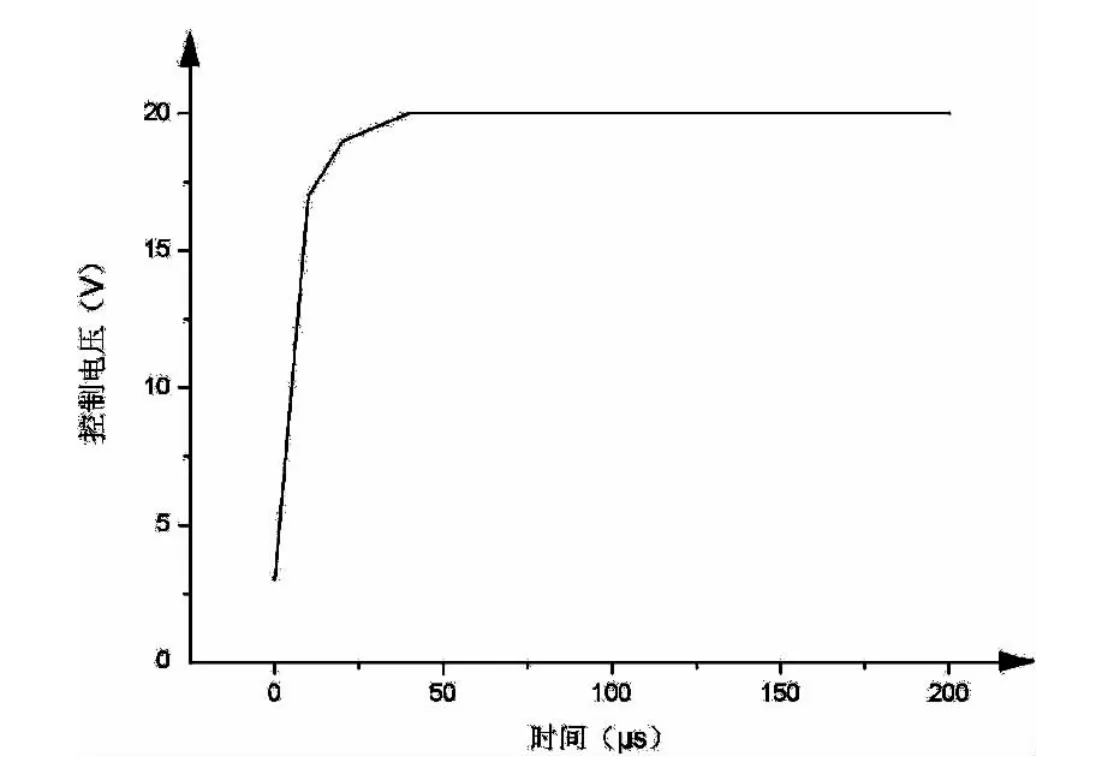
图3 ALC电压稳定过程
2 利用相位补偿优化功率控制技术的瞬态响应
在发射功率ALC控制过程中,其动态性能可用开环频域指标——穿越频率和相位裕量来衡量。其中穿越频率反映了系统的快速性,相位裕量反映了系统的稳定性[3]。一般地,相位裕量可由穿越频率求得。要想加快ALC响应速度,就必须提高环路的穿越频率,但同时要保证有足够相位裕量使环路稳定。穿越频率的计算比较复杂[4],这里采用零极点计算法,更适合工程上的应用。在图2中,其传递函数的表达式为:

该传递函数的幅频和相频响应如图4所示,其零点频率fz为:

极点频率fp为:

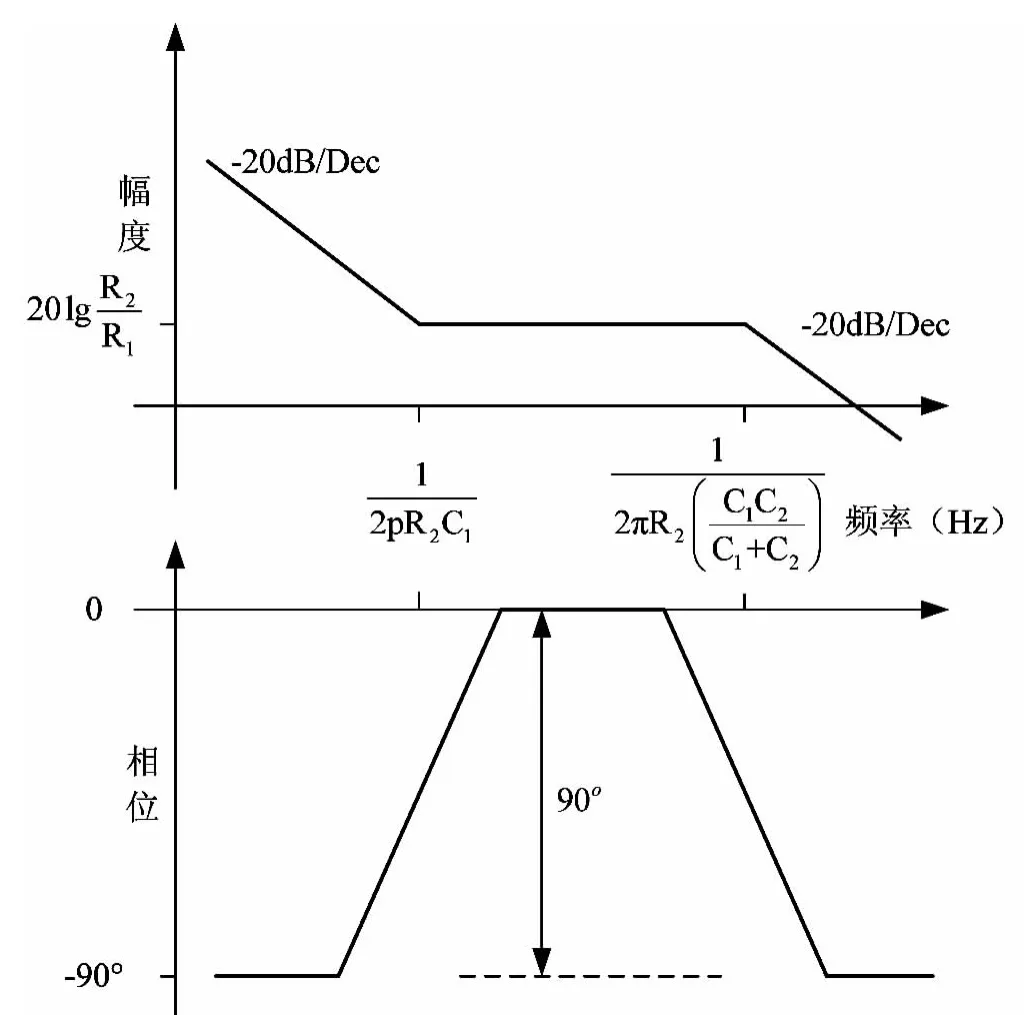
图4 环路滤波器的幅频响应和相频响应
基于环路滤波器的穿越频率在工程上的计算方法和图表[5],对于有源2次环路滤波器:

式中,k1、k2为归一化频率因子,fm表示穿越频率,计算为:

这样,在确定环路设计常数的情况下,选择相位裕量带宽fdL/fdH最优值,从而实现瞬态响应的最优值。
3 设计实例
按照上述发射机ALC控制环路滤波器的设计方法,给出一个UHF频段100W发射机的实例,主要设计参数为:相位裕量60°,相位裕量带宽比5,穿越频率15kHz,计算可得 fZ≈3.2kHz,fp≈73kHz,设计直流增益10dB,则:R1=1kΩ,R2=10kΩ,C2=5 000pF,C1=230pF。
经实测,实际ALC电路起控时间30μs,射频包络响应如图5所示。

图5 ALC射频包络响应
4 结束语
本文提出了利用开关电容和相位补偿实现最优化瞬态响应的功率控制技术,并给出了设计实例,实测结果显示该方法具有良好的性能,证明了这种方法的可行性。
[1]黎剑,章煜.一种无过冲RF功率控制技术的研究和实现[J].通信对抗,2008,(4):42-45.
[2]王姜铂,蓝永海,张向杰.基于DSP的射频功率数字控制研究[J].通信对抗,2008,(1):54-57.
[3]孙凡才.自动控制原理和系统[M].北京:机械工业出版社,1987:79-82.
[4]Brian Butterfield.优化带前馈电容的内置补偿DC-DC转换器的瞬态响应[R].Texas:Texas Instruments,2008.
[5]远坂俊昭.锁相环(PLL)电路的设计与应用[M].北京:科学出版社,2006:270-279.
猜你喜欢
防爆电机(2020年3期)2020-11-06 09:07:36
电子制作(2018年9期)2018-08-04 03:31:04
电子制作(2018年12期)2018-08-01 00:48:02
上海公路(2018年4期)2018-03-21 05:57:46
西部广播电视(2015年9期)2016-01-18 03:46:07
西部广播电视(2015年3期)2016-01-15 02:05:45
中国光学(2015年5期)2015-12-09 09:00:39
中国石油大学学报(自然科学版)(2015年2期)2015-11-10 06:08:07
空间控制技术与应用(2015年1期)2015-06-05 12:22:16
电测与仪表(2014年8期)2014-04-04 09:19:36
