
基于姿态定位算法的水下电缆监测系统
2013-09-04 02:04刘敬彪于海滨
杭州电子科技大学学报(自然科学版) 2013年5期
黄 蓉,刘敬彪,于海滨
(杭州电子科技大学电子信息学院,浙江杭州310018)
0 引言
目前海洋科学考察设备多采用同轴缆或者光电复合缆与考察船连接,完成信息交互[1]。取样设备进行水下作业时,由于电缆无法监测,时有被海底岩石勾挂,或释放过长被考察设备误伤而受到损伤。回收过程中极有可能导致电缆在损伤处断裂,造成重大人员财产损失。目前国际上对于有光照浅水区电缆监测,采用水下摄像头或者潜水员来监测[2],但此方法局限于海域与光照条件。而在深海区域内,国内主要通过观察缆的承重以及设备的倾斜度来估算电缆状态[3]或悬挂浮球以尽量避免电缆弯曲。此法依赖于人工判断,误差大且操作有一定的迟滞。本文介绍的监测系统采用CAN总线传输数据,利用已有水下设备将数据传输至考察船集控中心,经过运算,可以实时反映电缆姿态,对异常状态及时做出示警,保障作业安全。
1 系统工作原理
水下电缆姿态监测系统主要由监测系统、取样设备和母船组成。本系统主要依靠附着于铠装电缆上的多个存放于高压防水仓中的监测节点监测铠装缆的姿态信息,并通过CAN总线将发送姿态信息以及节点标号给水下取样设备的主控仓,主控仓将数据打包通过混合传输系统或者光纤传输系统将数据上传给母船上位机。上位机对比分析不同节点间的角度差与布放距离,经计算拟合,确定电缆当前姿态。利用现有主控仓CPU,无需单独添加设备,降低设计复杂度,并且节约成本。
由于监测节点布放间距相对较远,本文需要采用传输距离较远的通信协议。目前工业上多采用RS485和CAN总线[4]。RS485是单主网络,需要采用轮询的方式通信,通信实时性不足以保证。且当RS485某个节点存在故障时会导致整个系统的瘫痪,维护成本高,安全性大打折扣。而CAN总线属于现场总线范畴,以国际标准化组织制定的ISO模型为基础,具有完整的软件支持系统,能够解决总线控制、冲突检测、链路维护等问题。数据通信实时性强,安全性高,稳定性好,传输距离远,有很好的容错机制。特别适合在环境恶劣的海洋环境中使用。且取样设备主控仓采用C8051F040 CPU,它内置了CAN模块外设,开发难度大大降低。监测节点采用自带电池组供电,无需提供电源接口,减少对外连接通道,提高了系统安全性。
2 系统硬件设计
2.1 监测节点硬件设计
节点微处理器采用ST公司生产的STM8S208S6[5]。此款处理器运行速度快,稳定性好,小巧精致,特别适合小微型的监测节点。主频高达24MHz、采用高级STM8内核、具有3级流水线的哈佛结构、工作电压与温度范围宽、内置多路AD以及高性能CAN接口,满足节点对传感器数据实时采集与传输的需要。节点硬件结构如图1所示。
2.2 姿态传感器
节点采用两片VTI SCA60单轴倾角传感器在板上垂直分布来监测铠装电缆节点处的双轴角度X和Y。它的测量范围为±90°,单极性5V电压供电,工作温度范围宽。传感器按照角度以等比例电压输出,经过精密电阻分压,高频电容滤波后得到质量较好的输出电压送入STM8S208S6进行AD转换。
当输出电压为0.5V时表示此时角度为- /2,当输出电压为4.5V时为 /2,输出电压与对应角度成线性关系。如下:


图1 硬件结构图
式中,A表示实际角度值,Data为AD转换的数字结果,Vref为ADC的参考电压,△d为精密电阻分压比。
3 系统软件设计
3.1 监测节点软件设计
程序主流程图如图2(a)所示,定时中断流程图如图2(b)所示。程序的设计主要分为以下几个步骤:
(1)开始和系统的初始化;
(2)设置ADC连续采集模式;
(3)定时器产生溢出中断,读取数据;
(4)轮转采集通道;
(5)数据转换,CAN发送数据。
系统上电瞬间,初始化系统时钟,定时器,AD转换器,CAN以及中断响应机制。设置ADC处于连续工作模式。设置定时器使其每100ms触发一次溢出中断,将AD采集结果存入全局数据变量,同时切换转换通道。最后在While主循环中,将数据打包,通过CAN发送给主控仓CPU。主控仓CPU是水下探测设备的控制核心,仅需在其原有上行数据包末尾添加节点姿态数据即可实现。
3.2姿态定位算法
姿态定位算法采用曲线逼近的方法对水下铠装电缆进行模拟。本算法在甲板集控室上位机中实现。上位机软件使用Visual C#语言[6]进行设计,在VS2008平台上编辑。对电缆姿态进行动态跟踪,且对危险操作及时发出警报。
X,Y,Z坐标示意图如图3所示。X轴为平行于水平面沿着船宽的方向。Y轴为平行于水平面,沿船舶行驶方向。Z轴为垂直于水平面方向。节点布放时需紧贴电缆。Z轴电缆旋转不影响X,Y轴数据。
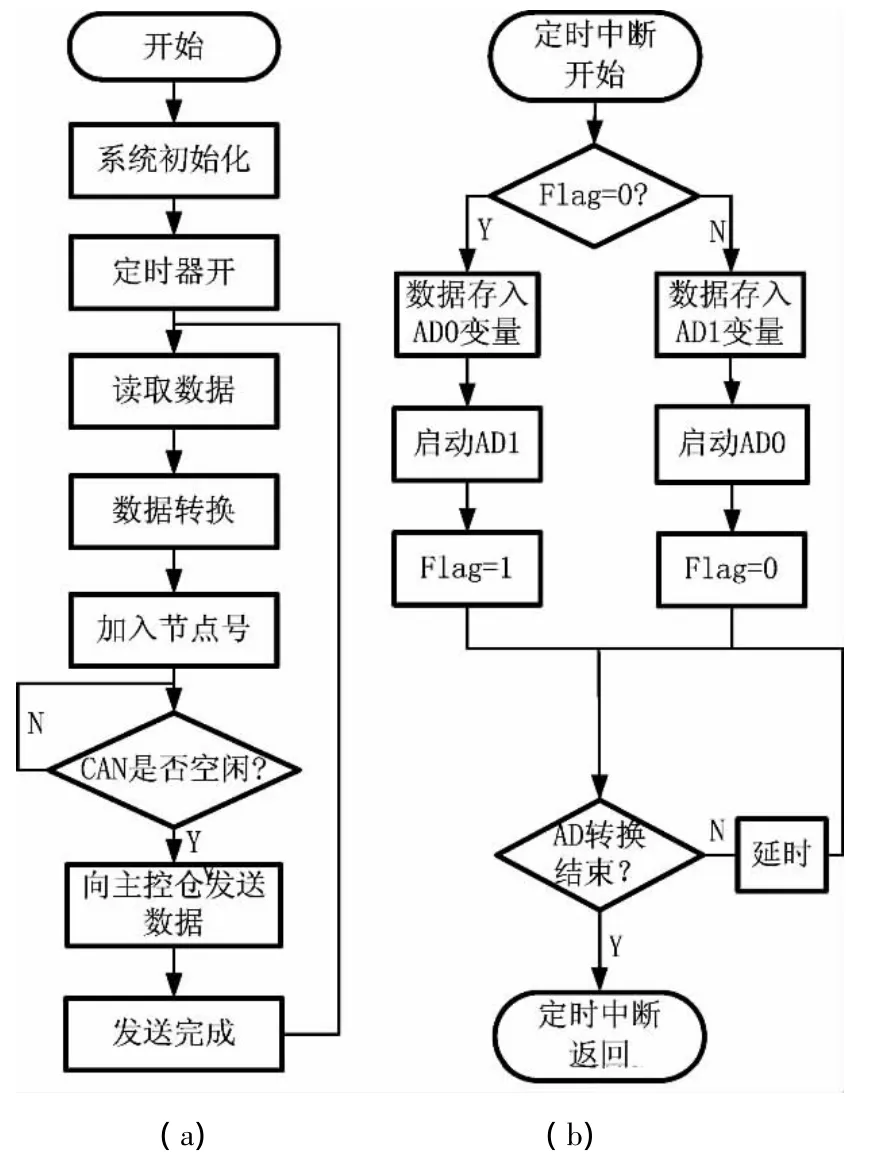
图2 设计流程图
科学考察船在设备施放时,一般处于0.2至1节的慢速航行或者动力定位状态,且铠装电缆释放至海底时有4 000至7 000m,在长距离的稀释下,X方向角度偏差很小。采用近似三角形计算其余弦的方法计算出电缆在Z轴方向的投影。原理如图4所示。监测节点按步长K分布,节点n-1的X轴方向倾斜角度为X,该段弧线可近似为一段直线,再利用三角公式得到节点n-1至节点n之间的电缆在垂直方向的投影长度为KcosX。此后将电缆视为只存在Y轴的偏角,且节点之间布放距离为KcosX。
由于铠装电缆质地坚韧,不易大幅度卷曲,弯曲轻微,形态近似为圆弧。节点n-1处的Y轴倾角为Yn-1,节点n处的Y轴倾角为Yn。原理如图5所示。在图中可以方便地得到从两节点引出的切线夹角为 -(Xn-1-Xn),那么圆弧所对应的圆心角为 Xn-1-Xn,又有弧长公式 L=θR 得 KcosX=(Yn-1-Yn)R,进而得到圆弧所在圆的半径公式:

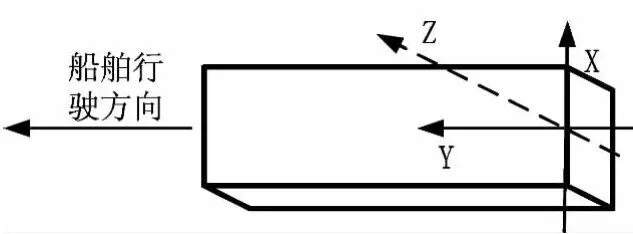
图3 坐标示意图
两节点间的电缆存在于与两节点相切,且半径为R的圆弧中。该圆弧即为电缆近似形状。上位机可参照式2与图5对电缆状态进行解析。从而对电缆姿态进行监测。操作人员可对照电缆姿态及时调整电缆的收放。如果电缆钩挂或释放过长沉放在海底,此时上位机即发出警报。

图4 X轴倾角剖视图
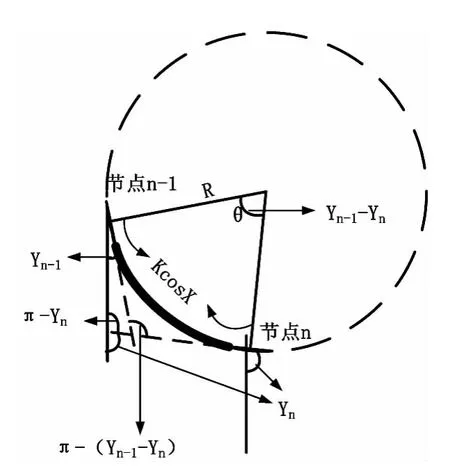
图5 Y轴倾角剖视图
4 系统调试
采用1m的硬质金属绞缆进行模拟调试。节点布放在缆的同一侧,同时保证在缆垂降状态时双轴输出角度值为0。节点采用阶梯式分布的方法。在近地端分布3个节点,相互之间步长为0.1m,分布相对密集。中间分布2个节点步长为0.2m。顶部分布1个节点,计6个节点。缆绳的最下采用C8051F020主板作为主节点来模拟水下设备主控仓。缆的最上端固定在高处,最下方人为牵引产生弯曲,模拟电缆实际使用时的状态。节点倾角数据如表1所示,在近地端Y轴角度明显增大,所以监测节点布放应更密集。且X轴角度变化轻微平缓,所以可简单等效为直线。在变换位置后上位机界面可以及时跟踪。实验证明该系统可准确地定位电缆姿态并能够对危险操作和异常状态及时做出预警。测试效果见图6。

表1 倾角数据

图6 软件效果图
5 结束语
本文提出的水下电缆姿态监测系统具有适应近地端倾斜较大的特点,有效利用水下设备CPU无需添加主控单元,降低设计复杂度,节约成本。在实验室环境下可监测电缆的实时姿态,对电缆异常状态发出警告,为海洋科学考察安全作业提供了思路。本设计下一步进行海上试验,以检验水下的运行效果。
[1]钟川源,刘敬彪,陈顺举.基于同轴电缆混合传输技术的研究[J].杭州电子科技大学学报,2008,28(1):4-7.
[2]李士涛,商涛.浅谈海缆敷设工艺中的监控手法[C].太原:中国海洋工程学会,2011:445-447.
[3]陈鹰.海底热液科学考察中的机电装备技术[J].机械工程学报,2002,38(z1):207-211.
[4]胥清华,李强.CAN总线发展与其他总线的比较[J].电气技术,2011,(7):46-49.
[5]潘永雄.STM8S系列单片机原理与应用[M].西安:西安电子科技大学出版社,2008:202-213.
[6]刘丽霞,李俊民.C#范例开发大全[M].北京:清华大学出版社,2010:225-256.
猜你喜欢
科学大众(2021年19期)2021-10-14
中国临床医学影像杂志(2021年6期)2021-08-14
北京汽车(2021年3期)2021-07-17
电线电缆(2021年1期)2021-03-29
科学大众·小诺贝尔(2021年10期)2021-01-22
防爆电机(2020年6期)2020-12-14
学生天地(2020年3期)2020-08-25
汽车观察(2018年9期)2018-10-23
中国自行车(2018年8期)2018-09-26
电子制作(2018年14期)2018-08-21
