混合动力轿车纯电动模式起步时纵向抖振的试验研究与控制
2013-09-03 10:06:00张立军孟德建邓海燕张舟云
汽车工程 2013年3期
张立军,郑 鹏,孟德建,邓海燕,张舟云
(1.同济大学新能源汽车工程中心,上海 201804; 2.上海电驱动有限公司技术中心,上海 200240)
前言
混合动力汽车通过系统的能量管理与动力协调控制,能够显著改善燃料经济性,并大幅降低污染物排放[1-2]。但是,若动力系统匹配不合理,协调控制不平顺,则会由于内燃机和电机的转矩转速波动以及动力切换过程中的冲击,在各种运行工况和工作模式下产生各种 NVH(noise,vibration and harshness)问题,严重损害车辆的舒适性和驾驶性,甚至恶化燃料经济性和排放性能[3-4]。因此,动力系统的NVH设计、分析与控制是混合动力汽车开发的关键技术之一,倍受关注。
目前,国内外关于混合动力系统的NVH研究主要集中在以下3个方面:(1)动力总成启停的瞬态振动与噪声[5-10];(2)动力总成的悬置系统匹配设计[11-12];(3)动力传动系统扭转形式的振动与噪声等[13-16]。其中,日本TOYOTA公司的混合动力汽车NVH分析与控制工作系统处于明显的领先地位[9-10]。但是,对于混合动力汽车冲击与振动的研究很少[17],尚未有文献涉及纯电动模式下的起步抖振问题。
某款强混合动力轿车在纯电动起步缓加速及慢速爬缓坡情况下存在严重纵向抖振问题,本文中通过试验与仿真相结合的手段进行剖析,明确了振源和影响因素,并提出控制措施,改进了起步加速性能。
1 混合动力轿车纵向抖振
1.1 混合动力轿车动力系统
图1所示为采用双电机的强混合动力轿车的动力传动系统的原理示意图。该双电机强混合动力系统具有多种驱动模式和制动回馈功能,性能优越。有关详细的系统配置与工作原理见文献[18]。其中,当驱动电机(TM)越过自动变速器(AMT)直接通过链传动驱动汽车前轴时,就形成了纯电驱动的工作模式。为避免在低速、小负荷下由内燃机驱动汽车,在车辆起步时常常采用纯电动模式,以降低油耗和排放。试验车辆采用的驱动电机额定转矩和额定功率为60N·m和10kW,峰值转矩和峰值功率分别为110N·m和15kW。
1.2 纵向抖振概述
该混合动力轿车在水平路面上以5km/h左右的低速行驶,或以稍低的车速沿缓坡低速爬行时,驾驶员和乘员都能够明显感受到车辆前后方向的抖动,以及座椅的低频振动,有时还会伴随轻微的低频噪声。但在更低的车速,或者更高的车速范围内采用纯电动模式行驶时,则无任何振动和噪声问题发生。采用内燃机驱动模式时无低速抖振发生,且抖振的发生基本与载客人数无关。
由于发生纵向抖振的行驶工况与车辆在交叉路口低速起步等待信号灯,以及坡道起步等实际工况非常类似,对驾驶舒适性影响很大,且存在安全隐患,必须消除。
2 道路试验方法与数据分析
2.1 试验方案设计
根据车辆纵向抖振发生的基本工况和驾驶员及乘员的主观感受情况,结合实际动力系统的特征,形成以下2个基本判断,作为试验方案制定的基本依据:(1)抖振仅发生于纯电动模式,电机是可能的振动激励源;(2)抖振仅仅发生在特定的车速(电机转速)范围内,可能存在传动系统的共振环节。
基于以上判断,拟通过客观测量系统抖振的特征,诊断振动源,识别共振环节,制定试验方案。
(1)根据车辆基本特性参数计算车辆在水平路面上低速起步加速时所需的电机驱动转矩,并结合实际测量的车辆加速度进行修正,确定40和60N·m电机恒定加载转矩为试验工况。转矩指令通过在线CAN通信下达,实现车辆的起步和缓加速;待达到抖振消失车速后,撤销转矩,车辆减速停车。这种加载方式一方面能够完全再现抖振现象,另一方面可避免驾驶员操作不一致及主观因素的影响,提高试验效率。
(2)为了便于振动源与传递路径的识别与分析,设置同步采样的信号包括:电机转速与车速(车轮转速)、电机机体和驾驶员座椅导轨的三向振动加速度(测量方向与车辆的通用坐标系方向一致)、电机的A相和C相相电流。其中,测量电机相电流的目的在于波形畸变分析和为电机转矩有限元模型提供输入数据。
2.2 试验数据分析
数据处理采取时间域和频率域相结合的方法进行,类似于文献[19]。本文中以40N·m恒定加载转矩工况为例进行分析。
2.2.1 时间域分析
图2为40N·m恒定电机转矩起步加速及撤销转矩的系统动态响应情况。由图2分析可知:在起步加速段,电机转速在100~300r/min范围内产生明显的转速波动,最大转速波动达±50r/min;同时,对应于此电机转速范围的时段内(10~14s),电机机体和座椅导轨振动明显加剧,驾驶员振动主观感受恶化;在电机转矩撤销瞬间,产生冲击振动;在滑行减速段,无明显转速波动与振动发生。
2.2.2 时频分析
图3为40N·m恒定电机转矩起步加速下电机转速波动的时频分析三维谱阵图。由图3可知:电机转速波动具有明显的阶次关系,尤以第1阶信号分量为主,阶次关系式为
f=λ·(pn/60)
式中:λ为阶次;n为电机转速;p为电机极对数,此处为4。
在120~225r/min转速之间,对应频率8~15Hz范围,电机转矩波动的幅值最大。
图4显示了40N·m时电机机体和座椅导轨三向振动加速度中x方向(沿车辆前进方向)的振动加速度的时频分析三维谱阵。结合图4和图3分析可知,振动加速度响应与电机转速波动的时频特性完全一致,说明振动响应来源于电机的激励。
综合时间域和时频的分析结果,可以确定车辆在起步缓加速时的纵向抖振的激励源是电机,即电机的转矩波动。
表1为不同工况下车辆低速抖振现象出现时电机转速范围。可见在2种工况下电机转速均为160~200r/min时出现抖动,同时伴随着电机转矩和振动加速度增大。
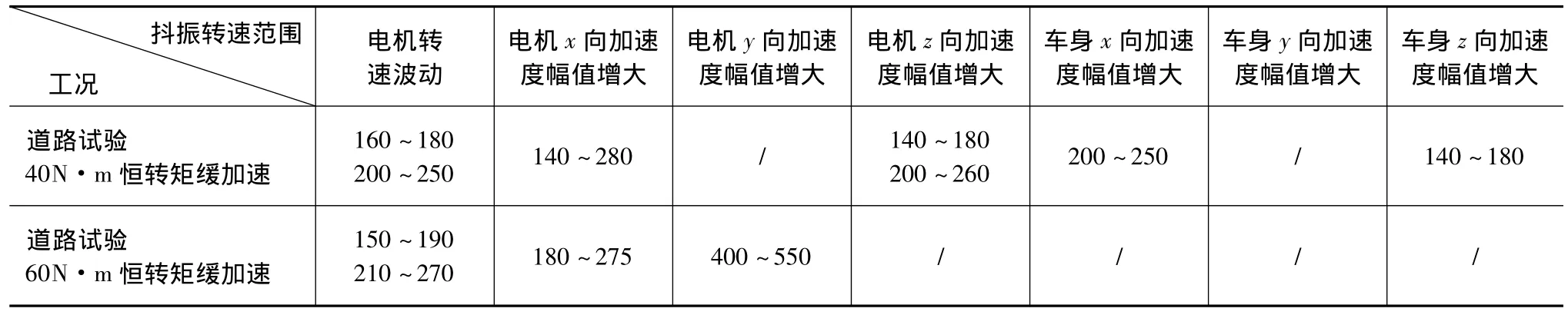
表1 不同工况下车辆低速抖振现象出现时电机转速范围r/min
3 电流畸变及其引起的电机转矩波动分析
3.1 电流的畸变分析
引起电机转矩波动的原因通常是电机气隙磁场和电机供电电流不同阶次的谐波[19],通过优化电机设计和改进制造工艺可以有效地减小电机气隙磁场引起的转矩波动[20]。因此本文中研究的重点在于电机转矩波动与定子绕组电流畸变间的关系。
图5为电机A相电流信号的时域局部展开。由于永磁转子的励磁磁场和定子绕组的空间分布不是理想的正弦波,同时定子电流中存在高次谐波[21],电流信号在整个时域范围内并不是理想的正弦波形,存在一定的畸变。特别在电机转矩波动变大时(图5中12s附近),电流信号峰值处发生较明显的畸变,简谐波型的波峰偏离中心位置,对称性变差。初步推断,电流的高阶成分对电机的转矩波动有很大影响。
进一步分析电流及其各阶次分量的特征。将Gabor阶次跟踪技术用于加速过程中电机电流信号的分析,探索电流不同阶次与转矩的相关性。分析步骤如下:①采用适当的参数对信号进行Gabor变换得到时频谱图;②通过时频分布利用峰值搜索法获得各阶信号的瞬时频率;③计算各瞬时频率在时频面上的坐标;④设定滤波带宽,采用遮隔法提取各阶分量的Gabor系数;⑤由Gabor展开实现选定信号分量的信号重构,得到阶次波形[22]。
图6所示为电机A相电流的时频分析图。由图6可知,电机电流在整个时域范围内呈现出明显的阶次特征,当电机转矩波动变大时,电流的第2、6阶分量幅值也明显变大。
图7所示为使用遮隔(Mask)法,对各信号分量分离后进行重构的时域图。由于前5s内各阶阶次重合,图中各阶次时域信号在5s后较为准确。由图7可见,第2、6阶次分量在转矩波动变大时也同时增大,验证了时频分析的结果并得出结论:电机转矩波动的变化是由于电机电流第2、6阶次分量引起的。
3.2 电机转矩波动分析
采用Maxswell软件建立永磁同步电机模型,通过有限元仿真预测电机的转矩波动。由于道路试验中转矩指令通过在线CAN通信方式下达,从CAN总线中获取的数据只是理想的转矩参数曲线,而电机参数随着运行状态变化,以固定的参数代入方程求解会带来很大的误差,传统的参数计算方法也很难精确计算永磁电机参数,此外,实测电机转矩数据受到各种因素的影响,准确度不高,因此采用有限元预测转矩波动。
在对电流分析的基础上建立Ansoft电机有限元模型,排除了定子绕组电流外其他因素的干扰,揭示激励源与电流畸变的关系。建模具体步骤为:①构建电机几何模型;②定义并赋予部件材料属性;③加载激励源(定子绕组电流)并定义边界条件;④设定求解参数(网格剖分等)并进行后处理[23]。
图8为电机二维有限元模型,颜色深浅变化表示磁感应强度B与电磁转矩T的比值,通过输入定子绕组电流可以计算电机的电磁转矩输出。
图9所示为40N·m恒定电机加载转矩工况下使用有限元分析得出的电机转矩随时间变化图和时域分析。模型输入为试验得到的存在畸变的定子绕组电流。分析可知,转矩信号在整个时间历程内都存在波动,转矩波动约为9.3% ~25.5%,在13s附近波动最大,结合系统的动态响应可知,当电机输出转矩波动变大时,电机转速也出现明显的波动,同时,电机机体和座椅导轨发生相应的剧烈振动。通过对其进行3D谱阵分析,发现转矩信号主要以1阶频率为主,并伴随有2阶和6阶高阶分量,转矩波动变大时能量变大。
相关文献研究提出[19],电机电流的高阶分量主要是由于逆变器开关频率和电流传感器误差造成的。在逆变器供电下,逆变器开关效应引起电流以逆变器开关频率波动,继而引起转矩也以同样频率波动。开关频率越高,转矩波动越小;开关频率越低,转矩波动越大。但开关频率受功率损耗的限制不能无限增大,始终会对转矩产生一定的影响。转矩波动频率等于开关频率的整数倍,开关频率越低,转矩波动的幅值越大。同时,电机通过测量两相电流进行反馈控制。由于电流传感器存在的直流偏移和两个传感器增益不等两种误差,导致电流产生1阶和2阶的波动,对转矩输出造成影响。
4 电流品质改善与电机转矩波动抑制效果
由上分析,通过抑制电机电流畸变可控制电机转矩的波动,进而显著改善车辆起步加速的平顺性。
对于由逆变器开关频率造成的转矩波动,文献[24]中提出将基于单周控制和滞环控制的双频逆变器用于电机调速系统,低频开关对高频开关处理的电流进行了分流,传递大部分功率,减少了开关损耗;高频部分传递小部分功率,提高系统动态响应,以达到降低电流谐波含量的目的。
对于电流传感器误差造成的转矩波动,可使用双精度电流传感器代替原有的电流互感器,实现对不同大小电流在不同量程下的精确测量,减小测量误差。
综合考虑各种解决方案的优劣和实际成本以及安装等因素,对原有系统进行了改进。在定子电压矢量定向坐标系中采用加入频率补偿器的方法来动态调整频率,使有功功率保持不变,从而抑制电流振荡。同时对于传感器测量的A、C相电流进行相应的滤波处理,避免调整频率的巨大波动。改进方案降低了电机电流中的畸变成分,并保持了系统的稳定性。在原有的变频调速装置上仅由软件实现,节约了成本。图10为改进后系统的A相电流时域波形。对比图5可知,电流信号中简谐波型的对称性明显改善。
将改进后的系统进行恒转矩加载工况试验。试验结果如图11和图12所示。由图可见:改进后的系统转速波动和振动加速度的幅值大幅减低;在原试验中电机转速达到160~180r/min时出现的电机转矩和振动加速度波动明显减小;在电机转速波动最大的时刻(10~14s),电机转速和电机与座椅导轨处振动幅值均为原来的1/3或者更低。这是因为电机定子绕组电流相比之前高阶分量减小,进而获得了更小的转矩波动,由此说明抑制电机电流畸变显著改善了车辆起步加速的平顺性。
5 结论
研究某新款混合动力轿车在纯电动模式起步时存在严重的纵向抖振现象及其振动来源和控制方法,结论如下。
(1)定子绕组电流阶次分量产生的电机转矩波动是导致车辆低速小负荷下的起步加速纵向抖振的主要因素。
(2)电机电流的高阶分量主要是由于逆变器开关频率和电流传感器误差造成的。
(3)通过抑制电机相电流畸变控制电机转矩波动,可以显著改善车辆起步加速的平顺性。
[1]Iqbal Husain.Electric and Hybrid Vehicles:Design Fundamentals[M].CRC Press,2003.
[2]Ehsani Mehrdad,Gao Yimin,Sebastien E Gay,et al.Modern E-lectric,Hybrid Electric,and Fuel Cell Vehicles:Fundamentals,Theory,and Design[M].CRC Press,2004.
[3]Govindswamy K,Wellmann T.Aspects of NVH Integration in Hybrid Vehicles[C].SAE Paper 2009-01-2085.
[4]熊建强,黄菊花.混合动力汽车噪声和振动的分析与控制[J].噪声与振动控制,2009(5):96-100.
[5]Kuang M L.An Investigation of Engine Start-Stop NVH in A Power Split Powertrain Hybrid Electric Vehicle[C].SAE Paper 2006-01-1500.
[6]Canova M,Sevel K,Guezennec Y.Control of the Start/Stop of a Diesel Engine in a Parallel HEV with a Belted Starter/Alternator[C].SAE Paper 2007-24-0076.
[7]张立军,叶荫,余卓平.HEV用发动机启动振动与噪声特性初步研究[J].汽车技术,2009(3):28-31.
[8]岳东鹏,刘洋,吴玉.HEV发动机启停振动和噪声分析与控制[J].汽车工程师,2011(5):25-28.
[9]Yoshioka T,Sugita H.Noise and Vibration Reduction Technology in Hybrid Vehicle Development[C].SAE Paper 2001-01-1415.
[10]Masashi K,Yoshioka T.Noise and Vibration Reduction Technology in New Generation Hybrid Vehicle Development[C].SAE Paper 2005-01-2294.
[11]黄启涌.某混合动力样车动力总成悬置系统隔振性能研究[D].长春:吉林大学,2006.
[12]江合连.混合动力轿车动力总成悬置系统隔振与优化研究[D].长春:吉林大学,2007.
[13]韩兵,蔡忆昔,张彤.功率分流混合动力传动系统扭转振动分析与刚度匹配[J].农业机械学报,2011,42(6):12-15.
[14]岳东鹏,张峻霞.混合动力轴系机电耦合振动的理论研究[J].拖拉机与农用运输车,2010,37(3):3-5.
[15]Jean Yves Routex,Sébastien Gay-Desharnais,Mehrdad Ehsani.Study of Hybrid Electric Vehicle Drive Train Dynamics Using Gyrator-based Equivalent Circuit Modeling[C].SAE Paper 2002-01-1083.
[16]Shuji Tomura,Yoshiaki Ito,Kensuke Kamichi,et al.Development of Vibration Reduction Motor Control for Series-parallel Hybrid System[C].SAE Paper 2006-01-1125.
[17]陈琳.混合动力轿车动力传动系冲击和振动的分析研究[D].长春:吉林大学,2007.
[18]刘明辉,刘东秦,王光平,等.FAW-TMHTM强混合动力系统平台开发[J].汽车技术,2010(7):1-5.
[19]梁锐.电动车动力传动系统扭转振动研究[D].上海:同济大学,2008.
[20]王爱元,凌志浩.电磁因素引起的无刷直流电动机转矩波动与抑制[J].微电机,2008(6):5-7.
[21]肖杭,金敏捷,谭茀娃,等.低速永磁同步电动机的设计研究[J].微特电机,2001(6):26-28.
[22]郭瑜,秦树人.基于瞬时频率估计及时频滤波的阶比分量提取[J].中国机械工程,2003(17):72-75.
[23]黄越,唐任远,韩雪岩.基于Ansoft的永磁交流伺服电动机转矩波动分析[J].电气技术,2008(4):15-18.
[24]向涛峰.双频逆变器供电的异步电机调速系统研究[D].重庆:重庆大学,2007.
猜你喜欢
汽车实用技术(2019年24期)2019-12-27 03:52:46
今日农业(2019年12期)2019-08-13 00:50:14
组合机床与自动化加工技术(2019年7期)2019-08-06 03:51:06
文学少年(原创儿童文学)(2019年1期)2019-05-23 09:37:26
中国化肥信息(2019年3期)2019-04-25 01:56:16
四川冶金(2018年1期)2018-09-25 02:39:26
价值工程(2017年28期)2018-01-23 20:48:29
环境保护与循环经济(2017年2期)2017-09-26 11:52:16
通信电源技术(2016年1期)2016-04-16 04:57:26
电机与控制应用(2015年3期)2015-03-01 03:49:59