基于DSP和运动控制芯片的转台伺服控制设计
2013-08-26 02:47黄岩平张玉广
舰船科学技术 2013年8期
王 嘉,黄岩平,张玉广
(中国船舶重工集团公司第七一八研究所,河北 邯郸 056027)
0 引言
光电跟踪系统是一个集图像采集处理、伺服控制以及精密机械于一体的复杂设备。根据光电传感器采集到的视轴与被跟踪目标之间的偏差信号,通过伺服系统控制视轴运动来减小跟踪误差,实现对目标的自动跟踪,其对实时性、准确性有较高的要求。
光电跟踪系统一直以来在军事上应用广泛,比如武器控制方面等。近几年,光电跟踪系统发展十分迅速,被广泛应用于公安、消防以及环境监控等民用领域,在机场安全、起降跟踪、船舶助航、防海盗、边海防安全、高空瞭望监控等都有广泛应用,尤其随着我国海洋开发的进展,该系统特别适合于安装在渔政船、巡逻船、救助船、缉私船等舰船上,对维护我国海洋权益发挥重要的作用。
伺服控制是光电跟踪系统的重要组成部分,传统的转台伺服控制采用的是对每个轴系进行精确的模型分析,通过确定系统参数进而确定控制参数,一般都采用多个回路以及复合控制等先进技术方法实现。但由于光电跟踪系统结构复杂,许多参数难以精确确定,在建立系统的数学模型时,具有严重的非线性等原因使得这种做法设计复杂,开发难度大,周期时间长,对环境变化的适应性比较差,可靠性不高。
本文立足于设计一种抗扰动的精密伺服转台,使用TMS320C6713 DSP作为核心处理器,配合PCL6045B专业的运动控制芯片来共同控制电机,DSP通过片外存储器读写操作就达到了对电机的复杂控制。对于CPU来说是一种负担的减轻,而且PCL6045B自身的闭环控制功能保证伺服转台的精确度,提高了可靠性,在满足实际使用要求的前提下简化了设计过程。
1 转台总体结构设计
与陆地环境不同,海洋环境中,在风的作用下会出现不同的海况。由于海浪对船体的影响,光电跟踪系统会发生周期性的摇摆 (横摇、纵摇、首摇、升沉等),使视轴相对目标产生大的角度晃动,造成图像模糊,甚至丢失目标,因此,为了隔离载体运动产生的扰动误差,本系统采用抗扰动的设计,系统由转台底座、速率陀螺、方位和俯仰轴系上的电机、主轴、导电滑环等组成。光电跟踪转台系统结构如图1所示。

图1 转台结构示意图Fig.1 Turntable structure diagram
底座用来稳定转台,增大系统的惯性,当有外部振动干扰时减小对系统的影响。2个电机分别安装在俯仰轴的轴向方向和底座内部的中心垂直轴上,用来带动俯仰轴和方位轴的转动。摄像头固定在俯仰轴上,通过电机带动方位轴和俯仰轴转动使得镜头可以对准允许视场内的任意方向。导电滑环安装在方位轴和底座之间,用来在有轴向相对运动的两侧实现图像、控制信号的传递,使得轴向旋转不受信号线的影响。速率陀螺用来提供外部干扰的速度反馈信息,根据文献[3]的理论,系统在3个轴系上安装了单自由度速率陀螺,1个在底座的垂直轴上,另2个安装在方位轴平面上相互垂直的2个方向上。根据测得的速度大小可以反推出转台稳定所需要进行的速度补偿


图2 三坐标系空间关系示意图Fig.2 Three coordinate system spatial relationship diagram
2 转台伺服控制硬件设计
光电跟踪系统的主体由图像采集处理单元和运动控制单元2个部分构成。传统的设计中运动控制单元需要用到伺服控制器,涉及到复杂的系统建模以及控制算法,使得运动控制的可靠性不高。本次设计采用运动控制芯片来解决这一问题,既可完成复杂的运动控制,又可提高系统的集成度,降低了成本。
在本设计中,TMS320C6713的应用主要是作为图像处理单元以及控制指令、参数发送单元。摄像机采集的图像信号经过AD转换由FPGA对其进行预处理,之后通过TMS320C6713进行图像分割、匹配、跟踪处理,得到目标与视轴中心的偏差量,然后TMS320C6713通过对运动控制芯片PCL6045B寄存器的访问来发送控制参数以及指令,PCL6045B再根据指令以及反馈的电机运动信息调整驱动器输出,对方位轴和俯仰轴电机进行控制,完成对目标的自动跟踪。图3所示为系统结构框图。

图3 系统硬件结构框图Fig.3 System hardware structure diagram
2.1 TMS320C6713的EMIF接口配置
本次设计中的图像处理单元必须拥有强大的运算处理能力,同时需要有一定的外部扩展接口,便于和后续的控制电路通信。TMS320C6713是一款功能强大的DSP,满足设计中对图像处理单元的要求,首先是可以同时处理8条32 bit的指令,其次是具有丰富的外部扩展功能,TMS320C6713的EMIF(外存储器接口)是外部存储器和TMS320C6713片内各单元间的接口,CPU访问片外存储器时必须通过EMIF,C6000系列的EMIF具有很强的接口能力,其数据总线宽度为32 bit,同时也提供对8/16 bit寄存器的读写支持,EMIF的可寻址空间一共有512 Mb,分为4个彼此独立的空间CE0~CE3,可以进行不同的访问控制,既提供了同步存储器的高吞吐率接口,也支持异步存储接口,而且异步接口速度、时序可编程。
本设计采用DSP和运动控制芯片的组合完成了转台伺服控制功能,作为一款功能强大的运动控制芯片,PCL6045B可以同时控制最多4个轴系的电机动作,具有比较优秀的控制性能,TMS320C6713与PCL6045B的接口示意图如4所示。
图4中,CE0为外部映射空间使能输出;EA[2∶5]为外部地址输出;ED[0∶15]为外部数据总线;AWE为异步存储器写使能输出;ARE为异步存储器读使能输出;EXT-INT4为外部中断输入;ARDY为异步存储器准备输入;RESET为复位输入。

图4 接口示意图Fig.4 Interface diagram
除了硬件接口可以直接连接,在时序控制上还可以根据器件的情况灵活设置,EMIF的配置是通过对EMIF的控制寄存器设置完成的,主要是对CECTL0(CE0空间控制寄存器)的设置,CE空间控制寄存器对于读/写操作的建立、触发和保持3个阶段的时间可以进行独立的设置,工作时首先是片选信号CE0和地址信号EA变为有效,然后是读/写信号ARE/AWE有效,之后结束1个访问周期,完成读/写操作,设计中需要保证接口电路信号发送、接收的时序有效性,这在后续的软件设计中体现。
2.2 PCL6045B的接口配置
本次设计中采用PCL6045B作为运动控制单元核心,作为一种通过总线接收CPU命令并产生高速脉冲控制电机的CMOS大规模集成芯片,芯片输出脉冲频率最高为6.5 MHz,可以提供各种脉冲控制功能,包括连续进给、定位、匀速回零、线性加速/减速、S曲线加减速以及动作中速度以及目标位置变更等;闭环以及补偿控制是PCL6045B的重要功能,PCL6045B最多支持同时控制4个运动轴,支持中断,并且可以向CPU提供PCL的工作状态,还具有与伺服驱动器相连的驱动器接口,以上功能都可以通过比较简单的指令实现,减少CPU控制电机产生的负担。DSP通过总线访问来对PCL进行控制,PCL芯片有4个地址线A[1∶4],A3和A4控制轴地址;A1和A2控制轴命令、寄存器以及I/O口地址,如表1和表2所示。

表1 轴地址Tab.1 Shaft address

表2 每轴命令、buffer及IO口地址Tab.2 Command,buffer and IO address for every axis
指令控制过程如下:
1)向BUFW0和BUFW1中写入运动参数的高、低一共32 bit。
2)向COMW中写入寄存器控制指令,当寄存器控制指令写入后,BUFW0和BUFW1中的运动控制参数会自动的写入相应的寄存器中。
3)向COMW中写入启动命令等控制指令,之后系统会根据寄存器中设定的参数来控制电机运转。
对系统状态的读取与指令的写入类似,只不过先是设置寄存器控制指令,之后才读取缓冲器中的数据。
3 转台伺服控制软件设计
系统工作时,首先设置运动参数,进入数字引导模式,在确定了跟踪目标之后进入自动跟踪模式,系统根据目标运动情况调整运动控制参数自动跟踪,在出现目标丢失跟踪失败或取消目标的情况下再次进入数字引导模式,系统软件流程图如图5所示。
本设计中每30 ms更新一次数据 (主要是考虑到图像采集的频率),包括新的位置信息以及速度信息,以单轴为例,控制器需要设置的速度符合式(3),新位置s满足式(4),如下所示:

其中:Δs为下一时刻目标预测位置与当前位置差;vit为速率陀螺反馈速度。
系统的软件设计采用C语言、汇编语言编写,使用TI公司的CCS编程环境,分以下2个步骤:
1)设置TMS320C6713EMIF相关的寄存器,保证逻辑地址对应关系正确以及接口满足各种时序要求;
2)对PCL6045B的访问设置。首先是把运动控制参数传递给输入输出缓冲器BUFW0、BUFW1,之后发送控制器编码到COMW,由于PCL6045B具有42个控制寄存器,而且支持预置寄存器功能,可以产生丰富的控制效果,达到各种控制要求,最后是发送控制指令编码到COMW,PCL6045B支持单轴动作以及多轴同时动作,适用于各种情形。
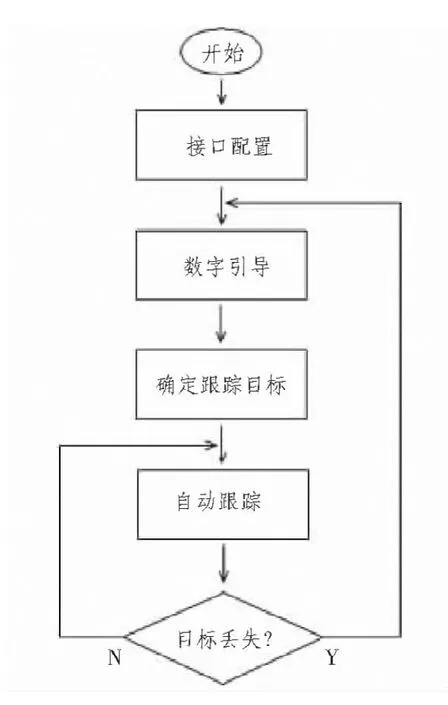
图5 软件流程图Fig.5 Software flow diagram
4 结语
与传统的伺服控制设计方法不同,本设计采用TMS320C6713 DSP和PCL6045B运动控制芯片的组合完成转台伺服控制功能,并且考虑到海洋环境的特殊性,加入由速率陀螺反馈构成的抗扰动设计,根据高性能的浮点DSP对图像实时处理之后发送的目标偏差量等信息来控制运动控制芯片产生复杂的控制脉冲,驱动电机完成跟踪功能,提高了系统的集成度以及可靠性,对转台伺服控制的设计有一定的借鉴意义。
[1]Ti公司.TMS320C6713 Digital Signal Processor Data Manual.TI公司,2004.
[2]NPM 公司.PCL6045B Data Sheet.AD 公司,2005.
[3]赵建川,薛乐唐.速率陀螺在船载地平式电视跟踪仪视轴稳定中的应用[J].光电技术应用,2009,24(1):22-25.
[4]李方慧,王飞,何佩琨,等.TMS320C6000系列 DSPs原理与应用(第2版)[M].北京:电子工业出版社,2003.
[5]三恒星科技.TMS320C6713 DSP原理与应用实例[M].北京:电子工业出版社,2009.
[6]叶佩青,张辉.PCL6045B运动控制与数控应用[M].北京:清华大学出版社,2007.
猜你喜欢
环球时报(2022-09-29)2022-09-29
装备维修技术(2021年37期)2021-11-03
发明与创新(2021年17期)2021-07-05
军民两用技术与产品(2021年12期)2021-03-09
计算机应用(2020年5期)2020-06-07
现代电子技术(2019年15期)2019-08-12
计算机研究与发展(2019年4期)2019-04-18
电子技术与软件工程(2018年1期)2018-03-22
科技视界(2016年13期)2016-06-13
科技视界(2011年5期)2011-08-22