基于刚性模型的履带车动力学建模与仿真研究*
2013-08-25 08:27:52桂华良
金属矿山 2013年3期
王 涛 桂华良
(1.衢州学院机械工程学院;2.浙江红五环机械有限公司)
履带机构一般由主动轮、托链轮、诱导轮、负重轮和履带片组成,是一个复杂的动力学系统。采用基于经验公式和大量试验的传统研究方法导致研发的成本高,周期长。随着计算机和计算方法的飞速发展,将数值模拟技术用于履带车辆的研发能有效地提高设计效率和质量[1]。
目前,多体动力学系统的仿真软件主要有DADS、ADAMS、Recurdyna 和 UM,其中 DADS、Recurdyna、UM采用的是相对坐标的递归算法,运算速度较快,而ADAMS采用的是绝对坐标系,速度稍慢,但都能很好地完成履带车辆的仿真分析。履带模型主要有2种:一种是柔性模型,假设履带为一条链的柔性带子,运用Bekker提出的地面力学压力-沉陷关系、设置土壤的剪切特性、土壤的摩擦特性等来计算地面施加于车辆的各种力,其建模简单快捷且求解效率高,能在设计早期对履带车辆性能快速预测[1];一种是刚体模型,该模型能详细地对履带板、销以及其他接触零件的力学特征进行研究,但由于考虑到零件间的接触关系,建模过程复杂,需要定义接触对及接触的各项参数,同时刚性模型与柔性模型相比自由度数大,计算量增加。本研究主要阐述基于刚性履带模型的建模机理,通过对履带车辆的平顺性分析,为研发履带车辆提供一种方法。
1 刚性履带理论模型
刚性履带模型如图1所示。

图1 刚性履带模型
刚性履带模型将每块履带片看作一个刚体,刚体间通过运动副或力单元连接,履带片之间的约束关系如图2所示,其公式表示为[2]

式中,r为履带片的连体坐标系x'y'z'原点在惯性坐标系XYZ中的位置矢量,s为运动副虚拟刚体圆心在连体坐标系x'y'z'中的相对位置矢量,d为运动副连接的两虚拟刚体圆形的相对位置矢量。图2中A为刚体的连体坐标系x'y'z'与惯性坐标系XYZ的坐标转换矩阵。

图2 履带片间的约束关系
2 接触模型
基于刚体模型的履带车通过定义主动轮、托链轮、诱导轮、负重轮、路面与履带片之间的接触关系和接触力学参数来进行履带机构的动力学模拟,其一般接触模型如图3所示。
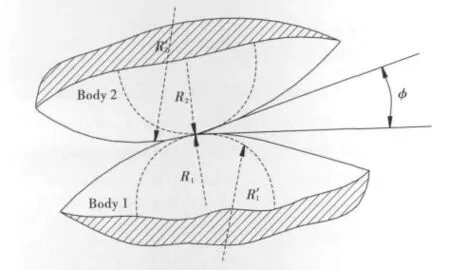
图3 接触模型
其接触法向力FN可以表示成以下公式:
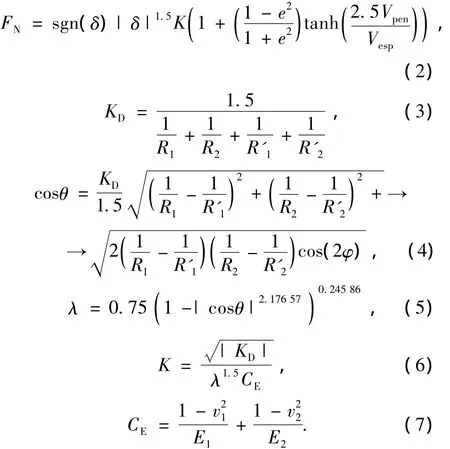
式中,R1为刚体1的最小曲率半径,R'1为刚体1的最大曲率半径,R2为刚体2的最小曲率半径,R'2为刚体2的最大曲率半径,E1为刚体1的杨氏模量,E2为刚体2的杨氏模量,υ1为刚体1的泊松比,υ2为刚体2的泊松比,Vpen为穿透速度,Vesp为最小穿透速度,e为恢复系数,θ为车体的俯仰角,δ为接触深度, 为接触切平面间夹角,KD为直径等效系数,K为法向力系数,λ刚度系数,CE为杨氏模量等效系数。
切向摩擦力Ft计算公式

3 履带车平顺性分析
良好的平顺性能改善车辆驾乘人员的舒适程度,同时也能减少地面对车体及相关连接件的冲击导致零件因振动而疲劳破坏。该履带车模型主要零件为车体、主动轮、诱导轮、5个负重轮、路面与94块履带片,履带片与主动轮、诱导轮、5个负重轮以及路面定义成球与拉伸面sphere-to-revolved surface(球与拉伸面接触子类型)以及sphere-to-extruded surface(球与旋转面接触子类型)这2种简化接触类型以减少刚性模型的计算时间,其中球与拉伸面接触18对,球与旋转面接触8对,履带片之间采用一般bushing(衬套力)力单元来连接,车轮与车体采用RSDA力单元连接。本研究建立某型履带车辆的平顺性模型如图4,履带车以5 m/s的速度通过一个高为58 cm的梯形凸台障碍,得到其通过凸台前后的车体的姿态如图5,车体质心处的加速度如图6,车体俯仰角如图7。
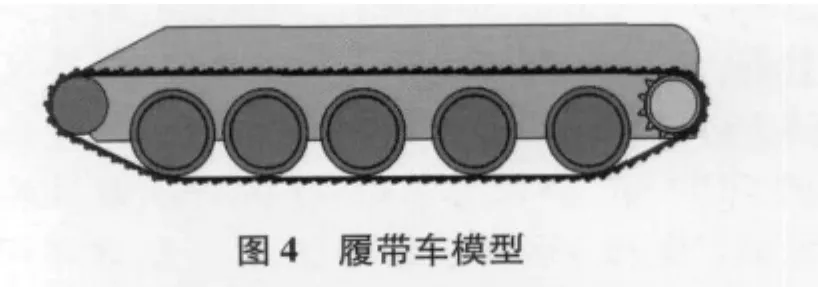

图5 履带车通过凸台障碍前后姿态
从图6中可以看出,履带车的车体质心处加速度值的变化在6~11 s时波动较大,因为此时履带车辆正通过梯形凸台障碍,地面对车体产生冲击导致车体产生加速度。图5为履带车通过障碍在仿真时间分别为7,8,9,10 s时的姿态截图,其俯仰角在6~10 s时波动大(图7),由上台阶的负值波动到下台阶的正值波动。设计员可以通过试验设计(正交试验设计,拉丁方设计或均匀设计)设计试验方案,通过选取不同的悬架参数和履带结构实时研究设计方案的各个性能指标,为设计提供理论依据。

4 结论
本研究通过定义履带机构各零件间的接触关系和接触参数建立了某履带车的三维刚性履带模型,并对其平顺性进行了数值模拟研究。该法能获取丰富的通过传统方法无法获知的信息,对履带车的动力学性能进行详细研究,为改进设计提供有价值的理论数据,为快速研发新一代产品提供一个有效的方法,最终达到通过数值模拟结合实验验证来提高履带车辆的设计水平。
[1] M G Bekker.地面-车辆系统导论[M].北京:机械工业出版社,1987.
[2] RecurDyn/Solver Theoretical Manual[M].[S.l.]:Function Bay Inc,2011.
[3] Warren C,Youngrichard G,Budynas.Roark's Formulas for Stress and Strain(Seventh Edition)[M].[S.l.]:McGraw-Hill,1989.
[4] Han Baokun,Li Xiaolei,Sun Fengchun.Multibody model and simulation of the tracked vehicles based on DADS[J].Journal of System Simulation,2002,14(11):1531-1533.
猜你喜欢
中学生数理化·八年级物理人教版(2023年4期)2023-05-05 07:29:32
中国石油石化(2021年8期)2021-03-30 12:39:14
装备制造技术(2020年2期)2020-12-14 03:09:28
高师理科学刊(2020年2期)2020-11-26 06:01:32
石油化工建设(2019年6期)2020-01-16 08:03:42
今日农业(2019年12期)2019-08-15 00:56:32
北京航空航天大学学报(2017年1期)2017-11-24 05:22:11
物理实验(2015年10期)2015-02-28 17:36:56
橡胶工业(2015年4期)2015-02-23 23:29:38
地震研究(2014年1期)2014-02-27 09:29:47