
基于车路协同的交叉口车辆最大流量协调方法*
2013-08-21 11:49陈阳舟盖彦荣
交通信息与安全 2013年4期
王 彬 陈阳舟 郭 创 盖彦荣
(北京工业大学电子信息与控制工程学院 北京100124)
0 引 言
车路协同技术的智能车路系统是智能交通未来的发展方向。在智能车路系统中,如何利用智能车辆控制精度高,具备无线网络设备能与交通基础设施进行信息交互的新特性提高交叉口通行效率,也开始成为智能交通领域研究的新方向。
文献[1-2]设计了一种基于预留技术的Multi-agent交叉口车辆控制系统,该系统抛弃了传统的交通信号灯,使用智能车在通行前向交叉口控制器提出预定申请,交叉口控制器通过仿真判断该车辆是否先前预订车辆有冲突来决定是否接受预定的方法来协调车辆的通行。仿真结果表明该算法相对于传统交通灯控制在通行效率上有了很大提高。但由于该方法中车辆在交叉口中的运行轨迹在进入交叉口前就已经定好,如果智能车无法在轨迹跟踪控制上保持相当的精度,车辆的安全性就会难以得到保障。
文献[3]通过预测冲突车辆运行轨迹是否相交的方式将车辆的协调问题转化为以各车加速度为变量的优化问题,求此优化问题的最优解便可得到使各方向车辆计算出不冲突、不停车通过交叉口的加速度。该方法中冲突方向上的车辆不会同时出现在交叉口的冲突区域,所以只对车辆加速度控制的精度有要求。此方法的缺点在于它必须对每辆车的行驶速度进行主动干预,车辆的行驶没有自主权,并且由于在求解优化问题时,搜索空间过于庞大,特别是在车辆较多的情况下,求解的复杂度会很高。
文献[4]通过分析双向单车道交叉口的结构,将交通问题转化为整数规划问题很好地解决了该交叉口环境下的无信号灯协调问题,相对于信号灯控制该方法能很好地降低车辆的平均延误。但该算法并不适用于多车道的情况,而且在规划问题的求解上上该方法依然采用排队长度作为车辆通行优先级的判定依据,并不能完全体现出车路协同技术的优势。文献[3-8]则多为一些较少车辆或者单车道的控制方法,并不适用于多车道、流量较大的情况。
为了在多车道,不同交通负载的情况下提高交叉口效率的同时保证安全。本文提出了一种以最大流量为目标的协调方法,该方法通过将交叉口协调问题转化为整数规划问题,在保证安全的同时,高效地协调了车辆的通行。
1 基于车路协同的交叉口车辆协调系统框架
考虑图1所示的交叉口,假设每个入口路段包括左转、直行和右转车道。由于右转车辆通常不控,所以没有画出,仅对左转和直行车流进行编号,分别为1~8。每个车流可以包含多个车道车流,假设第i个车流车道总数表示为Li,在一定距离范围内第i个车流的第m个车道上的车辆总数表示为Nim。于是,第i个车流中第m车道上的车辆分别编号为1,…,Nim。

图1 交叉口结构示意图Fig.1 The schematic structural view of intersection
各车流间的冲突关系用矩阵C=[cij]来表示,其中当车流i与车流j冲突时cij=1,当车流i与车流j不冲突时cij=0。不冲突的车流可以根据实际情况灵活组合相位。

针对上述类型的交叉口,设计新的交叉口协调控制系统见图2。该系统由车载单元和路边协调控制单元构成。车载单元与路边控制单元可通过无线通信网络传输信息,当车辆进入交叉口一定路段范围之后,会以一定周期不断地向交叉口路边单元发送其行驶信息。而交叉口路边单元在接收和处理车辆的信息之后,会根据预设协调协议,决策出最好的通行策略,并以发放命令的形式控制车辆的“走-停”行为。

图2 交叉口协调系统机制Fig.2 The mechanism of intersection coordination system
为了保证系统运行,需作如下假设:
1)所有车辆都是搭载车载单元和ACC控制系统的智能车辆;当车辆处于自由行使状态(没有使用ACC跟随前车)时,如果车辆需要加速(减速),它会以一个固定的加速度(减速度)来加速(减速),该加速度(减速度)的大小可由车辆自己决定。
2)暂不考虑无线通信的丢帧和时延。
3)车辆在进入交叉口路边协调控制单元的控制范围后都不允许换道。
4)暂只考虑小型客车,不考虑自行车和行人的影响。
同时需要对交叉口路边协调控制单元和智能车辆之间交互的信息内容做如下定义:
1)车辆到交叉口路边协调控制单元。
(1)车辆行驶信息。主要内容包括:用于唯一识别车辆的ID号、车辆的流向与所在车道、车辆当前离交叉口出口的距离、车辆当前的行驶速度和期望的行驶速度、车辆的理想加速度和减速度、车辆跟车时的理想车头时距。在车辆进入交叉口路边协调单元的控制范围之后,驶离交叉口出口之前,需以50 ms为周期向交叉口控制器该信息。
(2)已驶离。当车辆驶离交叉口出口时,需向交叉口路边协调控制单元发送此信息,并且在车辆再次进入交叉口路边协调单元的控制范围之前,不会再发送任何信息。
2)交叉口路边协调控制单元到车辆。
(1)通行允许。当交叉口路边协调控制单元允许某辆车通行时,向该车发送此消息。
(2)通行禁止。当交叉口路边协调控制单元禁止某辆车通行时,向该车发送此消息。
从上文中可以看出,交叉口路边协调控制单元的协调协议每次都可以决策多辆车的通行。为了保证车辆的安全,在上一批被发放“通行允许”命令的车辆离开交叉口之前,路边协调控制单元不会再启动协调协议来决策其它车辆的通行,即不会再让其它车辆进入交叉口。因此,为了每一次决策都尽可能多地放行车辆,应当将进入交叉口前一段距离的区域设计为触发区域,当交叉口内车辆被排空后,如果有车进入该区域,路边协调控制单元的协调协议将被触发运行,为所有进入控制单元监控范围的车辆做出通行决策。具体设置见图3。
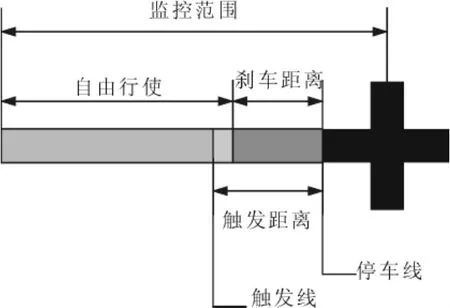
图3 触发区域示意图Fig.3 Trigger area
通常无线网络信号具有有限的覆盖范围,并且离交叉口过远的车辆信息对于协调算法来说也是没有必要的,故交叉口路边协调控制单元只会在一定监控范围内收集车辆的运行信息。如果触发线离监控范围的边缘太近,每一次算法触发后可能仅有少量车会得到受理。而根据上文的假设中,每辆车也都有一个对应于当前行驶速度的刹车距离。如果触发距离小于了最快到达停车线位置的车辆的刹车距离,则车辆很可能在收到“通行禁止”后来不及刹车冲过停车线。
综上所述,触发线离停车线的距离应做如下考虑:对于第i相位第l条车道上的第k辆车,dilk,trigger为其对应的触发线到停车线的距离,其计算方法为:

式中:Silk,stop为车辆刹车所需的距离;vilk为车辆当前的速度;ailk,min为车辆最大刹车速度。为了让触发线与停车线不至于重合,这里将10 m作为最小的触发距离。
交叉口路边协调控制单元和智能车辆在协调系统中的行为分别设计为见图4、5。
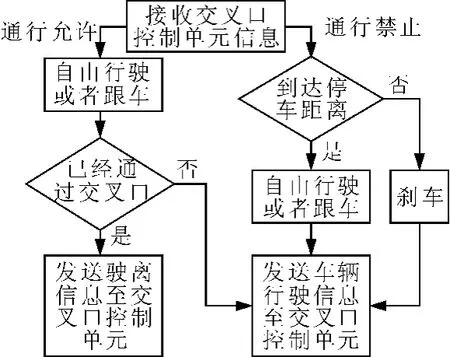
图4 车载单元处理流程图Fig.4 The flow chart of onboard unit
2 最大流量协调协议
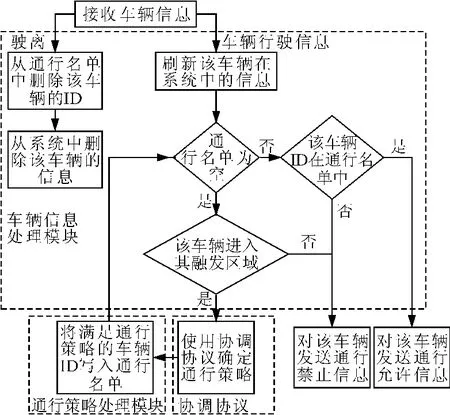
图5 交叉口协调系处理流程图Fig.5 The flow chart of intersection coordination system
上一节所述的系统框架,可以通过加入响应的协调策略,取代信号灯完成对交叉口处车辆的协调调度。文献[4]中所设计的以排队长度作为优先通行依据的整数规划策略,可以通过一定修改,应用到本文所设计的框架之中。修改后的整数规划模型可表示为

式中:P为总相位数;i和j为相位标号;m和d为车道标号;Li和Lj分别为相位i和j的总车道数;Nim为第i相位第m条车道上的总车辆数;Njd为第j相位第d条车道上的总车辆数。通过此式选出i,j后,系统会将i,j流向上所有车辆纳入通行名单。
但在每辆车的运行状态信息都已知的情况下,单纯使用排队长度作为协调的依据并不全面。交叉口协调的目的应当是尽可能增大交叉口处的车流量,根据车辆当前的速度以及离交叉口的距离等信息,可以对其通过交叉口所需的时间进行预测,然后便可以找到单位时间内通过的车辆最多,即流量最大的通行车辆组合。该问题可以表述为以下整数规划问题。


式中:l为车道标号;a、b、k为车辆标号;tilk为第i相位第l条车道上的第k辆车的通行时间;Nil为第i相位第l条车道上的总车辆数;ni,j(t)为i、j相位下,通行时间比t要小的车辆总数。通过求解此整数规划问题,便可以得出最合适的tilk,而i和j相位中所有通行时间小于tilk的车辆将都会被纳入通行名单。
通行时间tilk可以以以下方式进行预估。假设第i相位第l条车道上的第k辆车正在以速度vilk行驶,其理想的通过交叉口的速度为Vilk,车辆离交叉口出口的距离为Silk,exit。为了将速度从vilk调整到Vilk,车辆需要行驶一段距离Silk,adjust,其计算公式为
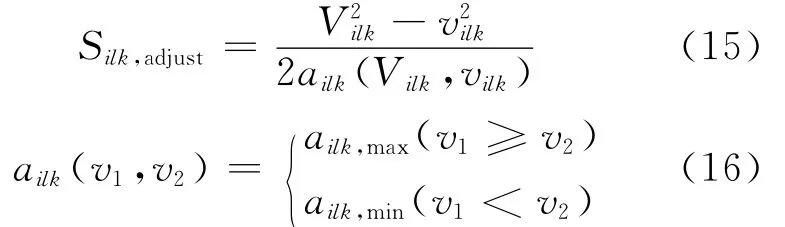
式中:ailk,max为车辆预设的最大加速度,ailk,min为车辆预设的最大减速度。
如果Silk,adjust≥Silk,exit,说明车辆在驶离交叉口之前无法调整到速度Vilk,那么它的通行时间t为

否则,车辆会在驶离之前调整到Vk,并匀速地行驶一段时间才到达交叉口的出口,此时

因为车辆在进入交叉口路边协调控制单元控制范围后不允许换道,并且车辆之间会通过ACC控制保持一定的时距,所以后车驶离交叉口的时间不会小于前车驶离交叉口与后车期望时距的和,故车辆的实际通行时间tilk为

式中:tilk-1为第i相位第l条车道上的第k-1辆车的通行时间,hilk为车辆k所期望的车头时距。
3 仿真实验
为了验证该系统对交叉口通行效率提高的有效性,本文在MFC框架下搭建了一个常见的双向3车道交叉口环境(见图6),同时加入了传统4相位设计(即:东西直行、东西左拐、南北直行、南北左拐)的定时信号灯控制和自适应信号灯控制作对比实验。其中,自适应交通灯控制能与车辆进行无线通讯,并会根据停车线前100 m范围内(如果排队车辆超过100 m,则以实际排队长度计算)车辆所需的通行时间来决定绿灯的时长,当某个相位没有车时,会自动跳过该相位,其相序变化与传统定时交通灯相同。
具体实验设置如下。
1)每条车道的长度为200 m(从车辆的生成点到停车线)。
2)车辆生成时以均匀分布规律随机分配起始点和终止点。
3)车辆的速度范围为60~80 km/h,车辆产生时其速度在此范围内以正态分布规律随机分配。
4)车辆预设的最大加速度和减速度分别为4 m/s2和-4 m/s2。
5)车辆长度为3.873 m。
6)车辆预设的期望车头时距为1.4 s。
7)为安全起见交通灯控制的黄灯时长为4 s。
8)仿真步长为0.03 s,每次实验时长1 000 s。
9)最大车辆到达率为7 500 veh/h。

图6 交叉口仿真环境Fig.6 Intersection simulation environment
实验以平均停车等待时间(当车辆速度小于15 km/h时,认为该车辆已停车[9])、平均排队长度和停车率作为评价指标。停车率的计算公式为:

式中:nvehicle为实际到达的车辆数,nparking为所有到达车辆的总停车次数。实验结果见图7~9。

图7 平均停车等待时间Fig.7 Average parking time

图8 平均排队长度Fig.8 Average queue length

图9 停车率Fig.9 Parking rate
从实验结果可以看出,不同时长的固定时间交通灯控制对不同的交通负载表现出不同的性能。当负载较低时,较短的绿灯时间能快速切换相位,使得少量的排队车辆能快速通过,减少等待时间和排队长度。当负载比较大的时候较长的绿灯时间能尽可能地排空车辆,反而能表现出更好的性能。
自适应交通灯控制因为能随着交通负载的不同调整自己的绿灯时间,所以在不同的车流量下均能表现出比各定时控制更好的性能。但其性能上瓶颈也很明显。第一,为了保证安全,在相位切换时不得不加入黄灯时间保证排空交叉口内的车辆;第二,各相位之间没有优先级,控制器并不能决定让那些车先走能提高整体的交通流量。从这两点来看,自适应交通灯控制相比固定时间的交通灯控制并不存在本质上的超越,只是达到了交通灯控制在一定负载下的最优值。
相比之下,使用车路协同交叉口车辆协调框架却能从根本上解决交通灯控制的弊端,它不需要黄灯时间来保证安全,车流方向组合灵活,并且能够根据协调协议选择出最优的通行方式,在任何负载情况下其总体性能都优于交通灯控制,特别是在流量比较低的情况下,车辆几乎无需在交叉口前等待即可通过。
对比最大流量方法和排队长度优先协调策略,因为最大流量算法的性能指标结合了排队长度以及各车辆的速度和位置等信息作为协调的依据,故在整体性能上要高于仅以排队长度作为判断依据的协调方式。但由于排队长度优先协调方法不一定会一次将排队车辆排空,当负载高于80%时,最大流量协调系统在停车率方面会略高于能一次排空车辆的自适应交通灯和排队长度优先协调方法。
4 结束语
对比国外同样使用车路协同技术和整数规划来解决交叉口问题的方法,本文的方法在总体上表现更加优越,并使用一定措施保证通行安全,更适合于车辆运动精度不高时的交叉口协调。但由于在设计时并未考虑网络传输延迟、丢包对协调方法的影响,如何在信息传输延迟的情况下协调车辆,依然有待下一步研究。
[1] Dresner K,Stone P.Multiagent traffic management:An improved intersection control mechanism[C]∥ Proceedings of the Fourth International Joint Conference on Autonomous Agents and Multiagent systems.Newyork:ACM,2005:471-477.
[2] Dresner K,Stone P.A multiagent approach to autonomous intersection management[J].Journal of Artificial Intelligence Research,2008,31(1):591-656.
[3] Lee J,Park B.Development and evaluation of a cooperative vehicle intersection control algorithm under the connected vehicles environment[J].Intelligent Transportation Systems,IEEE Transactions on,2012,13(1):81-90.
[4] Ghaffarian H,Fathy M,Soryani M.Vehicular ad hoc networks enabled traffic controller for removing traffic lights in isolated intersections based on integer linear programming[J].Intelligent Transport Systems,IET,2012,6(2):115-123.
[5] Shingde V,Raravi G,Gudhe A,et al.Merge-by-Wire:Algorithms and System Support[C]∥ Real-Time Systems Symposium, 2008. Barcelona:IEEE,RISS,2008:25-34.
[6] Milanés V,Perez J,Onieva E,et al.Controller for urban intersections based on wireless communications and fuzzy logic[J].Intelligent Transportation Systems,IEEE Transactions on,2010,11(1):243-248.
[7] Milanés V,Alonso J,Bouraoui L,et al.Cooperative maneuvering in close environments among cybercars and dual-mode cars[J].Intelligent Transportation Systems,IEEE Transactions on,2011,12(1):15-24.
[8] Guerrero-Ibanez A,Contreras-Castillo J,Buenrostro R,et al.A policy-based multi-agent management approach for intelligent traffic-light control[C]∥Intelligent Vehicles Symposium (IV),2010 IEEE.San Diego:Intelligent transportation Systems Socity(ITSS),CA,2010:694-699.
[9] Chard B M,Lines C J.TRANSYT:he latest developments[J].Traffic engineering &control,1987,28(7-8):387-390.
猜你喜欢
工会博览(2022年33期)2023-01-12
扬子江(2019年3期)2019-05-24
电子测试(2018年23期)2018-12-29
自动化学报(2017年4期)2017-06-15
文学少年(有声彩绘)(2017年1期)2017-02-14
浙江大学学报(工学版)(2016年9期)2016-06-05
电子制作(2016年21期)2016-05-17
数学教学通讯·初中版(2015年5期)2015-06-17
电网与清洁能源(2015年2期)2015-02-28
电测与仪表(2014年22期)2014-04-04
