基于滑模控制的三相四线制有源滤波器的研究
2013-08-20 04:57:50吴雷周怡
电子设计工程 2013年18期
吴雷,周怡
(江南大学 江苏 无锡 214122)
随着科学技术的迅猛发展,电力电子技术变得更加成熟,各种大功率开关器件得到了广泛的应用。技术的发展虽然给电能的变换应用带来了很大的方便,但是也造成了严重的电力系统谐波污染[1]。有源电力滤波器是一种功能强大的电力电子装置,它对谐波能快速跟踪同时实现谐波和无功功率的补偿。
在我国的电力系统中,工厂和居民用电一般采用三相四线制的形式接入。以往的研究主要集中于三相三线制系统,所设计的有源电力滤波器并不适用于三相四线制系统。三相四线制系统往往与不平衡负载相连接,中线电流不为零。系统中不仅有谐波正序分量,还有负序分量和零序分量。由于以上因素,设计三相四线制系统中的有源滤波器的难度较大。有源电力滤波器的主电路为变流器,变流器的控制策略在很大程度上影响了有源电力滤波器的补偿性能。常见的有源滤波器控制策略有电流滞环控制、三角波比较控制、无差拍控制和电压空间矢量控制等,在应用中都有一定的局限性。分析有源电力滤波器的主电路可知,它工作在不同的开关模态下,是一个变结构控制系统。滑模控制具有很强的鲁棒性,对于外界干扰表现自适应性,适合作为变结构非线性系统的控制策略[2]。因此,本文将滑模控制理论应用于有源电力滤波器的电流跟踪控制中。
1 三相四线制有源电力滤波器主电路数学模型
文中主电路变流器的拓扑结构采用三相四桥臂拓扑结构,如图1所示。其中,桥臂的输出电感用L来表示,开关器件用T1~T8来表示,直流侧电容用C来表示,三相输出电流用ifa、ifb、ifc来表示,直流侧电流用 idc来表示,中线电流用 ifn来表示,电网电压分别用Usa,Usb,Usc来表示,各个桥臂的中点相对于直流母线负端 N 点的电位分别由 Ua,Ub,Uc,Un来表示,直流母线电压由Udc来表示。
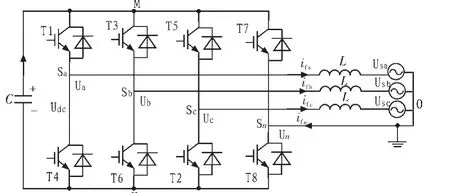
图1 四桥臂变流器主电路拓扑结构Fig.1 Topology structure of main circuit with four bridge inverter
开关函数Si定义为如下:

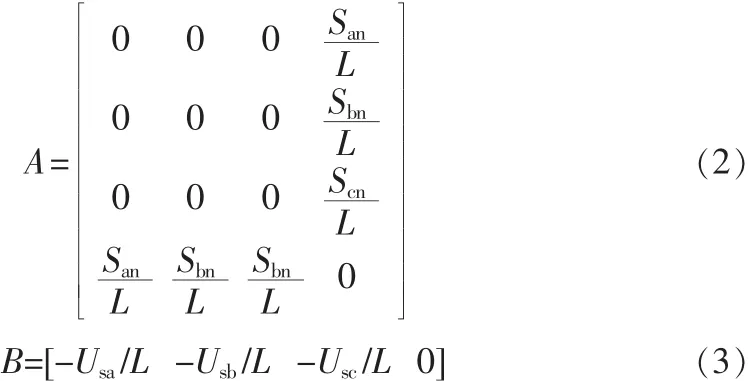
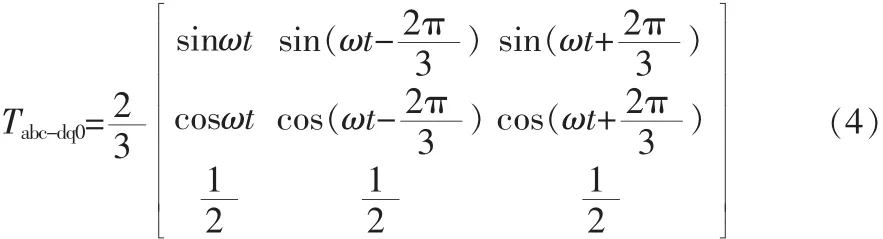
其中,Ua_ref=Ua-Un,Ub_ref=Ub-Un,Uc_ref=Uc-Un。 另外,令 San=Sa-Sn,Sbn=Sb-Sn,Scn=Sc-Sn,同时引入状态变量 X,X=[ifaifbifcifn]T将abc坐标系转换到dq0同步坐标系,以方便设计控制器。考虑到坐标变换在实际系统中关联到锁相,本文锁相信号由正弦A相相电压来表示,同时根据正弦制作坐标变换的表,变换矩阵和Park变换的变换矩阵稍有差别,如式(4)所示:
得出d-q-0坐标下的数学模型:
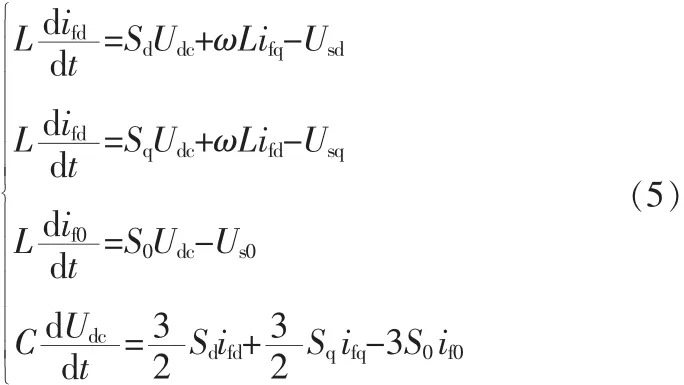
由式(5)可知,同步旋转坐标变换的时候引入d、q轴之间的耦合项。当电流控制器采取闭环调节的时候,d轴或者q轴的输出电流通常会受到彼此控制量的影响,这将会对控制系统产生严重的影响,在设计控制器时需要先进行解耦的处理。
2 逆系统解耦线性化
逆系统方法的基本原理[3]可概括为:原系统和原系统的α阶可逆系统之间带有一个状态反馈,这个状态反馈是根据原系统的初始值和α阶可逆系统的初始值之间的关系设定的α。阶可逆系统逆系统和原系统串联起来之后得到伪线性系统。得到伪线性系统后,一般将该系统分成几个独立的子线性系统,再分别设计控制器。可见,通过逆系统将原本的非线性系统转化为了伪线性系统,使问题得以简化,降低了控制器设计的难度。
在上文中已经推导出了三相四桥臂有源电力滤波器在d-q-0 坐标下的变量表示。 在式(5)中,令[x1,x2,x3,x4]=[ifd,ifq,if0,Udc],[u1,u2,u3]=[Sd,Sq,S0],[y1,y2,y3]=[x1,x2,x3],将原系统的状态方程写作:
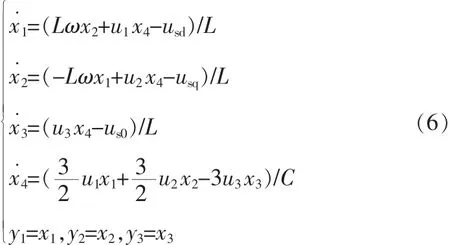
由式(6)可知,三相四桥臂有源电力滤波器系统具有3个输入[x1,x2,x3]和 3 个输出[y1,y2,y3],具有非线性特征,且变量之间存在耦合的关系。将被控对象进行逆系统构造,得到一个线性解耦的系统,利于控制器的设计[4]。
对 APF 的系统输出[y1,y2,y3]分别求导可得:
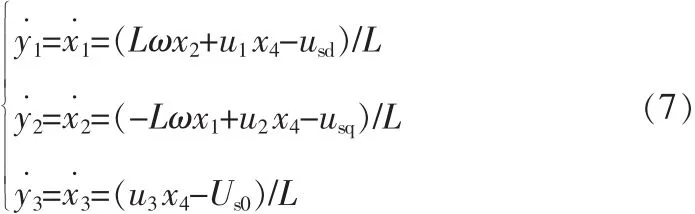
式中可明显看出含有[u1,u2,u3],由式(7)可求得有源电力滤波器的逆系统如下:
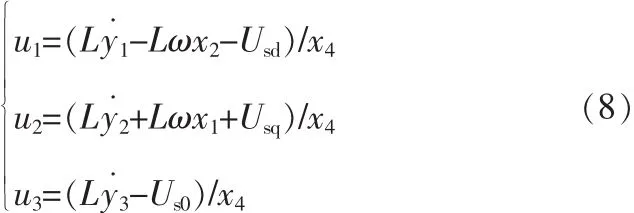
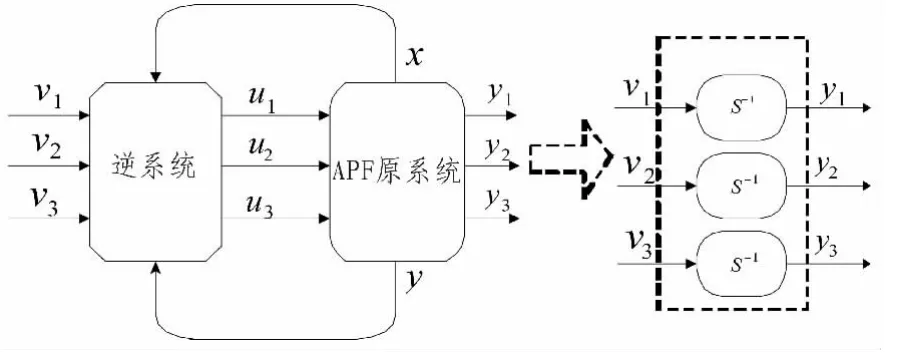
图2 线性化解耦后的有源电力滤波器系统Fig.2 Active power filter system after linearization and decoupling
图2中的伪线性具有三输入和三输出,状态变量之间彼此不存在耦合,可以看成3个独立的子线性系统:

3 滑模控制器的设计
本文设计的滑模控制器必须保证能实现对指令电流的快速、精确跟踪。此外,由于电网的不稳定和负载的突变,补偿电流也是不断变化的,这就要求系统具有良好的鲁棒性。众所周知,滑模控制的鲁棒性非常优良,所以控制器的设计重点应该解决合适的切换面和性能优良的控制律。
1)切换面的选择
2)滑模控制律的设计
该部分即确定系统在趋近运动段的运动状态,选取指数趋近规律进行设计,如式(12)所示:

指数趋近律中的-ks部分称作指数趋近项,-εsgn(s)部分称作等速趋近项[5]。考虑将等速趋近变为变速趋近,变速趋近项为-εs2sgn(s),变速趋近的速度与s2成正比。当运动点远离滑模面时趋近速度很大,运动到滑模面附近时,速度较小,改进后的指数趋近律如式(13)所示:

下面检验改进后的指数趋近律是否满足滑动模态存在和可达条件:

以上分析可知,改进后的指数趋近律可以满足条件。
为了更近一步减小抖振,考虑用饱和函数代替式(13)中的符号函数。饱和函数图像如图3所示。
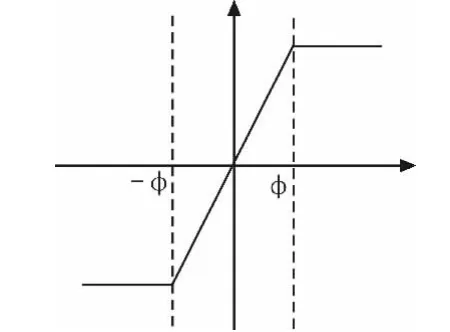
图3 饱和函数图像Fig.3 Image of saturated function
饱和函数的公式表达如式(16)所示:
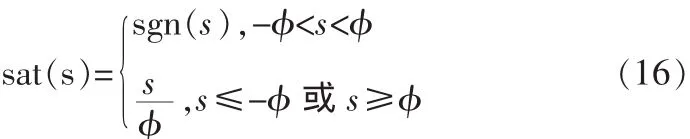
符号函数具有继电器特性,开关切换会造成系统控制的不连续性。用饱和函数代替符号函数,在[-φ,φ]的区间内采用线性控制而不是变结构控制。饱和函数的边界层附近增益高,并有一定量的时间滞后,可以缓和开关切换的不连续性[6]。本文采用指数趋近律与饱和函数切换相结合的方法设计滑模趋近律,大大减弱了抖振,同时也能保证快速趋近,使控制器具有更好的动态性能。
式(9)所示子系统经过改进滑模控制律分别为:

按照同样的方法设计式(10)和式(11)所示的子系统的控制律:

取趋近律函数的参数 k1=k2=k3=105,ε1=ε2=ε3=1。
4 仿真分析
搭建好系统仿真模块之后,进行仿真来验证本文理论的正确性。仿真时间为0.2 s,在0.04 s向系统中投入有源滤波器,负载为三相整流桥。
当三相整流桥谐波源负载工作时,向电网注入大量5次和7次谐波,负载侧电流发生畸变,成为鞍形波,此时,电源侧电流也是鞍形波。经0.04 s时,有源滤波器投入,电网侧畸变为鞍形波的电流恢复为正弦波,谐波被滤除,如图4所示。
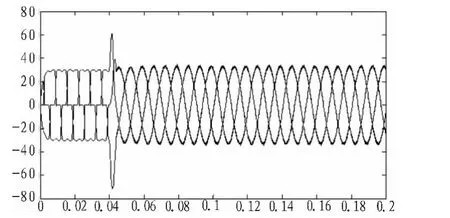
图4 电网侧电流Fig.4 Grid-side current
在没有投切有源滤波器的时候,对电网谐波电流进行FFT分析。补偿前的谐波畸变率THD=24.66%,电网被严重污染,如图5所示。
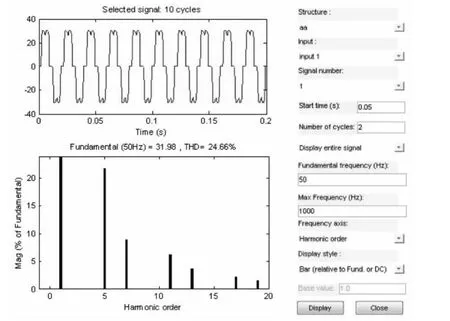
图5 补偿前电网侧电流的FFT分析Fig.5 FFT analysis of grid-side current before the compensation
采用滑模控制,补偿后的谐波畸变率THD=0.60%。由此可见,采用滑模控制能让有源滤波器具有良好的补偿效果,如图6所示。
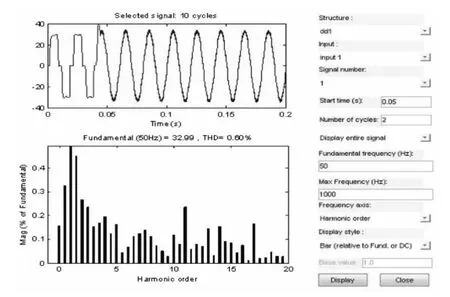
图6 补偿后电网侧电流的FFT分析Fig.6 FFT analysis of grid-side current after the compensation
5 结 论
基于三相四线制有源滤波器的主电路的数学模型,用逆系统方法实现解耦和线性化,对三个独立的子系统分别设计滑模控制器。针对滑模控制的抖振问题,提出一种指数趋近律结合饱和函数的设计方法,缓解结构切换的不连续性,有效削弱抖振。仿真结果证明,本方法适于有源滤波器的工作特点,能提高有源电力滤波器的指令电流跟踪能力,同时系统具有强鲁棒性。本方法具有较好的理论和实用价值,为工程实践提供了新的思路。
[1]Ying Jie-he,Yunping Zou,Fei Liuet al.Research on parallel operation of active power filters[C]//IEEE Power Electronics Specialists Conference,2006.18-22.
[2]马皓,张涛,韩思亮.新型逆变器滑模控制方案研究[J].电工技术学报,2005,20(7):50-56.
MA Hao,ZHANG Tao,HAN Si-liang.Analysis and design of sliding mode control for novel buck inverter[J].Transactions of China Electrotechnical Society,2005,20(7):50-56.
[3]李泰,王奔.基于逆系统方法的三相PWM整流器直接功率控制[J].电气传动,2008,38(10):33-38.
LI Tai,WANG Ben.Direct power control of three phase PWM rectifier based on the inverse system theory[J].Electric Drive,2008,38(10):33-38.
[4]魏文辉,刘文华,宋强,等.基于逆系统方法有功无功解耦PWM控制的链式STATCOM动态控制策略研究[J].中国电机工程学报,2005,25(3):23-28.
WEI Wen-hui,LIU Wen-hua,SONG Qiang,et al.Research on fast dynamic control of static synchronous compensator using cascade multilevel inverters[J].Proceedings of the CSEE,2005,25(3):23-28.
[5]Cortes D,Alvarez J,Vazquez N.Output Feedback Sliding-Mode Control for the Boost Inverter[C]//Proceedings.of IEEE IECON’06.Paris:2006:1890-1895.
[6]金鸿章,罗延明,肖真,等.抑制滑模抖振的新型饱和函数法研究[J].哈尔滨工程大学学报,2007,28(3):288-291.
JIN Hong-zhang,LUO Yan-ming,XIAO Zhen,et al.Investigation of a novel method of saturation function for chattering reduction of sliding mode control[J].Journal of Harbin Engineering University,2007,28(3):288-291.
猜你喜欢
哈尔滨铁道科技(2020年4期)2020-07-22 02:22:28
中国惯性技术学报(2019年6期)2019-03-04 09:50:06
测控技术(2018年4期)2018-11-25 09:47:26
测控技术(2018年3期)2018-11-25 09:45:40
通信电源技术(2018年3期)2018-06-26 08:05:48
火控雷达技术(2016年3期)2016-02-06 02:30:40
广西文学(2015年9期)2015-10-24 03:53:14
电源技术(2015年12期)2015-08-21 08:58:44
电测与仪表(2015年12期)2015-04-09 11:44:44
电测与仪表(2014年14期)2014-04-04 11:53:30