基于Track 模块的GPS监测数据分析
2013-08-16 06:12殷自成谭海洲
科技视界 2013年2期
殷自成 谭海洲
(1.长沙理工大学交通运输学院,湖南长沙410004;2.长沙理工大学桥梁工程湖南省高校重点实验室,湖南长沙410004)
0 引言
高精度GPS 动态定位是具有很广阔的应用天地, 它可应用于工程测量领域,安全监测领域和航空航海等领域,它具有用户多样性、速度多异性、定位实时性、数据短时性、精度要求多变性等特点。 随着动态用户的目的与要求的精度的不同,GPS 动态定位的方法也不同,如单点动态定位,实时差分动态定位等。
无论何种方法,动态定位要想获得高精度的定位结果,其关键问题是如何快速、正确地求解整周模糊度。近二十年来,大量学者对运动过程中求解整周模糊度的方法(简称为OTF)进行了大量的研究,提出了各类方法,主要有双频伪距法,模糊度函数法等。 TRACK 模块利用双频P 码伪距观测量和相位观测量组合求解模糊度的方法。本文利用TRACK 模块对短基线与长基线两组数据进行单历元解算, 逐历元解出监测点的动态轨迹, 再利用小波分析理论获得较好的观测数据,并且对短基线与长基线的数据进行对比,分析其优劣。
1 TRACK 模块
TRACK 模块是麻省理工学院开发软件GAMIT 中的一个动态双差定位模块,即动态得到动态观测站相对于参考站的三维坐标差及单位权中误差, 从而得到观测站的真实运动轨迹。
TRACK 模块采用“M-W”方法来计算宽巷模糊度:

(其中fi为Li波段的载波频率, ∂i为对应的相位观测量;Pi为对应的伪距观测量)
从式中可知宽巷模糊度还与基线长度无关,这是TRACK 模块得到L1,L2模糊度的主要途径。
TRACK 中影响GPS 观测量精度的卫星钟差和轨道误差可以采用IGS 数据中心提供的精密钟差和星历来消除,电离层和对流层延迟影响可以采用相关模型进行削弱。
2 高桥墩GPS 监测点数据的实验对比研究
第一组短基线测量方案: 采用二台Trimble R8 系列双频GPS 接收机, 一台布设在高桥墩南侧半山腰集料水泥场地上的强制观测墩上,点位稳定,作为参考点。 监测点选在高桥墩(206m)上面,采用有强制固定的装置,采样频率为5HZ。第二组长基线测量方案:参考点采用IGS-Wuhn 站,监测点选在高桥墩上面,与第一组短基线方案采用的监测点是一样的。
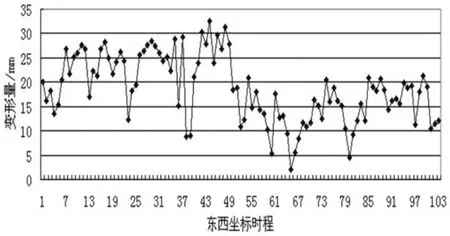
图1

图2
GPS 数据处理采用TRACK 模块逐历元解出监测点的动态轨迹,即逐历元解出监测点相对于参考点的坐标,限于文章篇幅,仅绘出两组方案的东西向02:59-03:59 时间段(UTC)的位移变化量,两组数据都采用相同的时间且采样率都归算为30s(图1,图2)与其相对应时刻双差相位观测量RMS(图3,图4)。

图3

图4
由于TRACK 模块采用载波相位观测值差分进行动态相对定位且第一组短基线测量方案中基准点与监测点的空间弦长不过一公里,可知对流层,电离层、卫星、接收机有关的误差可认为均已消除。 第二组长基线测量方案中基准点与监测点的空间弦长超过500 公里,可知对流层,电离层等有关的误差不能很好的消除,只能根据TRACK 模块提供的相关模型进行削弱。 因此,第一组数据比第二组可靠。 同时根据桥墩的现场环境来看,第一组数据(短基线)主要受多路径与GPS 测量噪声的影响,可采用小波分析理论,削弱测量噪声与多路径影响,结果如图5,图形较好的反应了桥墩的动态位移量。 而对第二组数据而言,桥墩的变形量已淹没于测量的误差中,其数据的增大与观测时段内的观测条件逐渐变差是相关的。
图3, 图4 为两组方案相同时间段内每个历元的双差相位RMS变化情况。 从图中可以看出,第一组方案(短基线)的RMS 集中在5mm到17mm 之间,最大不超过22mm,而第二组方案(长基线)的RMS 则是比第一组RMS 大,且有一定的趋势性即增大。考虑其测量时间段是向正中午靠近,观测条件会渐渐的不利于观测,因此数据的质量会变差,图形是符合实际情况的。
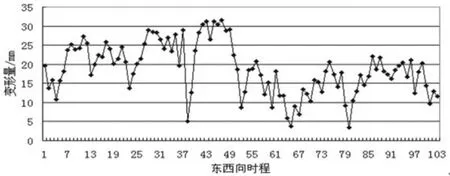
图5
3 结论
3.1 与传统的变形监测技术相比,GPS 技术有着独特的优势,但桥墩施工过程中,现场比较复杂,GPS 信号会受到各种因素影响。由于采用的是高采样率GPS 进行监测,其数据量大,在使用GAMIT 软件中的TRACK 模块进行轨迹估计时,不可将长时间的观测值一同处理,必须分段处理观测数据,以避免多路径的影响。
3.2 利用Track 模块可得到相对于观测站的空间直角坐标,从而可获得桥墩的每时刻的动态位移量、 通过对获得的GPS 观测数据进行分析,可知当基线较长时,利用Track 模块处理数据是达不到变形监测要求。因此,在观测时基线不宜过长,且要采用滤波方法进一步提高观测数据的质量。
[1]胡丛玮,刘大杰.单历元确定GPS 整周模度的分析[J].南京航空航天大学学报,2001,33(3):267-270.
[2]孙亚峰.单历元定位技术及其在地震观测中的应用[D].上海:同济大学,2009,27(6):23-25.
[3]周星.基于GAMIT TRACK 和Bernese PPP 的地震监测比较[J].测绘信息与工程,2010.35(2):19-23.
[4]苏小宁.单历元高频GPS 在地震学中的应用[C].中国地震学会空间对地观测专业委员会2009 年学术研讨会论文摘要集,2009:49
[5]魏子卿,葛茂荣.GPS 相对定位的数学模型[M].北京,测绘出版社,1998.
[6]King R W and Bock Y.Documentation for the GAMIT GPS analysis software[M].Mass Inst of Tech,Scripps Inst Occeangr,2003,Release 10.1.
猜你喜欢
测绘学报(2022年5期)2022-05-31
高技术通讯(2021年3期)2021-06-09
科学(2020年5期)2020-11-26
中国惯性技术学报(2020年2期)2020-07-24
山东交通科技(2020年1期)2020-07-24
上海公路(2018年1期)2018-06-26
舰船电子对抗(2016年5期)2016-12-13
航天器工程(2014年5期)2014-03-11