
电子液压式力矩保护器工作原理
2013-08-14 06:06李征
机械工程师 2013年5期
李征
(三河市新宏昌专用车有限公司,河北三河 065201)
1 引言
直臂卷扬式随车起重机原使用的电子式力矩保护器,当力矩达到额定力矩的100%~110%时,切断主油路,起到安全保护作用,但是不符合GB6067.1-2010《起重机械安全规程》中应允许向安全方向操作的规定;而起重量10t 以上的随车起重机,由于变幅油缸三角形几何关系,液压式力矩保护阀误差较大,不符合“当力矩达到额定力矩的100%~110%时应切断力矩增大方向的油路”的规定。本文仅就一种新型的电子液压式力矩保护器的工作原理进行探讨。
2 随车起重机的力学模型
直臂卷扬式随车起重机最大额定起重量时的力学模型和几何关系分别见图1、图2。
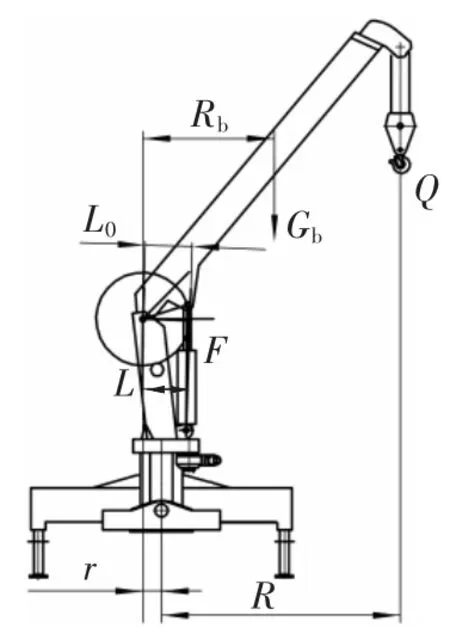
图1 直臂随车起重机力学模型
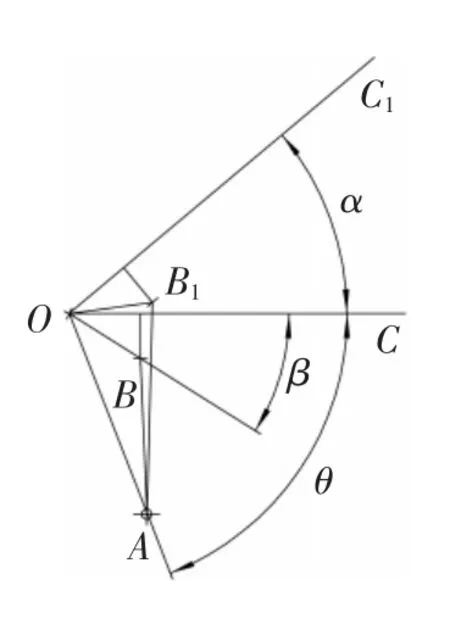
图2 直臂随车起重机变幅几何关系
随车起重机起升力矩为非等力矩原则,不同的臂长和不同的起升仰角所需的起升力矩是不相同的,根据图1中的受力关系,得出下式:

根据图2 几何关系推导,得出如下力矩关系:
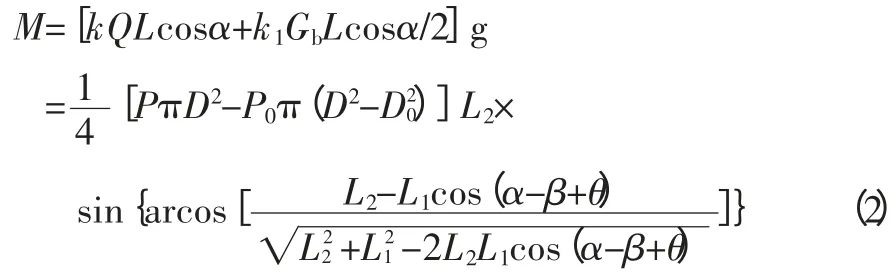
式中:P-变幅油缸无活塞杆腔工作压力,MPa;k-起升载荷动载系数;k1-起重臂自重动载系数;Q-额定起重量,kg;R-工作幅度,mm;r-回转中心到起重臂回转中心的距离,mm;Gb-起重臂质量,kg;Rb-起重臂重心到起重臂回转中心的距离,mm;D-变幅油缸直径,mm;D0-变幅油缸活塞杆直径,mm;P0-变幅油缸活塞杆腔工作压力,MPa;g-重力加速度,9.81m/s2;α-伸缩臂仰角,(°);β-变幅油缸与伸缩臂交点和伸缩臂回转中心连线与水平线的夹角,(°);θ-变幅油缸与立柱交点和伸缩臂回转中心连线与水平线的夹角,(°);L1-变幅油缸与立柱交点到伸缩臂回转中心的距离,mm;L2-变幅油缸与伸缩臂交点到伸缩臂回转中心的距离,mm。
由式(2)知,与起升力矩相关的各参数除了P、P0、α 外均为已知量,只要测量三个参数即可与额定值进行比较。
3 工作原理
电子液压式力矩保护器工作原理有两种方式:(1)动力液压油分流控制方式;(2)动力液压油截止控制方式,分别见图3 和图4。
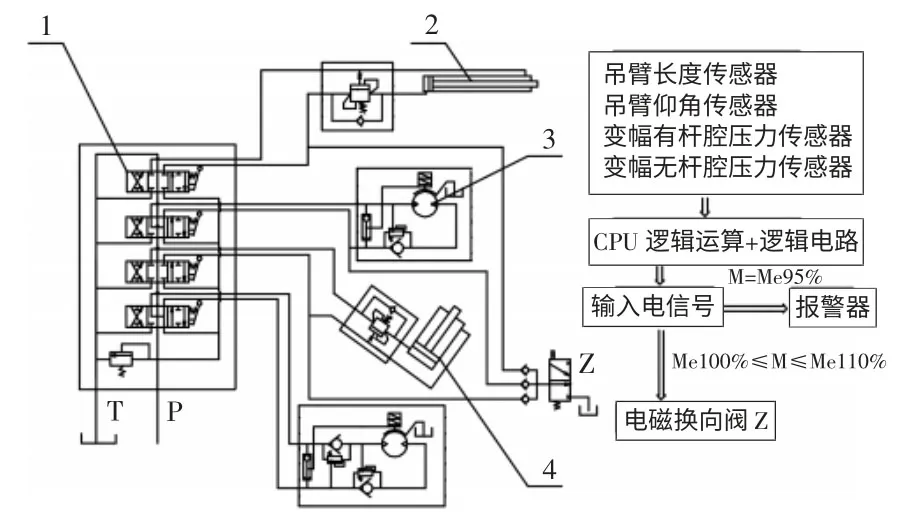
图3 动力液压油分流控制方式工作原理

图4 动力液压油截止控制方式工作原理
3.1 动力液压油分流控制方式工作原理
吊臂长度传感器、吊臂仰角传感器、变幅有杆腔压力传感器和变幅无杆腔压力传感器将检测信号传递给CPU,CPU 经过逻辑运算,当计算起升力矩达到额定起升力矩的95%时,将信号传输给报警器,发出报警声;当计算起升力矩达到额定起升力矩的100%~110%时,接通电磁换向阀Z 电路,电磁阀换向,P 和T 口直接接通;当操作吊臂伸缩油缸2 伸出、卷扬机构3 起升、变幅油缸4 回缩时,动力油直接通油箱,该方向无法动作,而可以实现反方向的动作;当吊臂伸缩油缸2 回缩、卷扬机构3 下降、变幅油缸4 伸出后,起升力矩值减小,当起升力矩值小于额定起升力矩100%后,CPU发出信号,切断电磁换向阀Z 电路,电磁阀换向,切断P1和T,系统恢复正常。
该系统利用电磁换向阀Z 分流,由于单向阀和电磁换向阀以及回油管路的压力损失,在分流处会存在一定的背压,对变幅和伸缩动作没有影响,但对空载卷扬过卷报警会有一定的影响,如果分流油路压力损失大,过卷报警装置失灵,此时可以采取以下措施:(1)尽量采用流量大、压力损失小的单向阀和电磁换向阀及较大管径的油路,压力损失控制在1MPa 以下。(2)在卷扬下降油路上加装减压阀或卷扬起升油路上加装顺序阀,提高空载卷扬工作压力。
3.2 动力液压油截止控制方式工作原理
吊臂长度传感器、吊臂仰角传感器、变幅有杆腔压力传感器和变幅无杆腔压力传感器将检测信号传递给CPU,CPU 经过逻辑运算,当计算起升力矩达到额定起升力矩的95%时,将信号传输给报警器,发出报警声;当计算起升力矩达到额定起升力矩的100%~110%时,接通电磁换向阀Z1、Z2、Z3电路,电磁阀换向,P1截止;当操作吊臂伸缩油缸2 伸出、卷扬机构3 起升、变幅油缸4 回缩时,动力油截止,该方向无法动作,而可以实现反方向的动作;当进行吊臂伸缩油缸2 回缩、卷扬机构3 下降、变幅油缸4 伸出后,起升力矩值减小,当起升力矩值小于额定起升力矩100%后,CPU 发出信号,切断电磁换向阀Z1、Z2、Z3电路,电磁阀换向,系统恢复正常。
该系统为利用电磁换向阀换向截止液压油通向执行机构,该系统安全可靠,需要利用3个电磁阀,成本较高,需要较大的安装空间。
4 结论
以上两套系统均可满足直臂卷扬式随车起重机力矩安全保护功能,第一种方法相对简单、成本较低,建议优先采用。
猜你喜欢
起重运输机械(2022年19期)2022-11-05
中国特种设备安全(2022年3期)2022-07-08
石油和化工设备(2020年5期)2020-06-09
专用汽车(2018年10期)2018-11-02
建筑机械(2018年8期)2018-08-16
大陆桥视野·下(2017年8期)2017-09-19
山东工业技术(2016年15期)2016-12-01
专用汽车(2016年1期)2016-03-01
制造业自动化(2014年9期)2014-12-19
西安建筑科技大学学报(自然科学版)(2014年5期)2014-11-10
