三体船操纵特性仿真研究
2013-08-10 02:56:56姚迪邹艳忠李光磊
船电技术 2013年9期
姚迪, 邹艳忠, 李光磊
(1. 海军驻大连426厂军事代表室,大连 116000;2. 海军92956部队三中队,旅顺 116041;3. 海军驻九江地区军事代表室,九江 332007)
0 引言
近年来国内外对三体船的研究业已广泛的展开,唯独对于三体船的操纵性研究甚少[1]。然而操纵性作为重要的航海性能与战技指标,迫切需要开展对三体船操纵性的研究,该方向的研究具有十分重要的学术理论意义与工程应用价值。鉴于此,本文以典型三体船为目标船型,研究了三体船水动力导数计算方法,进而对三体船的操纵特性进行了系统的计算机仿真,并对仿真计算结果进行了广泛的分析与研究。
1 三体船操纵运动数学模型的建立与分析
研究三体船操纵性,首先要选定合适的操纵运动数学模型,本文选择MMG分离模型作为三体船操纵运动基本数学模型[2]。
1.1 船舶操纵运动方程
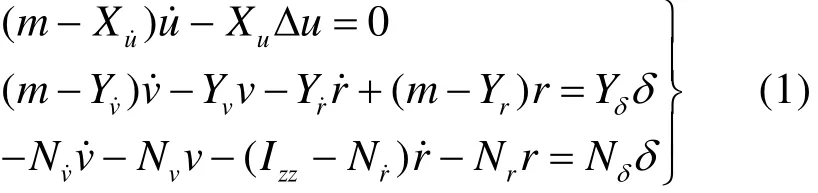
通过坐标变换并进行近似处理,就可以得到舰船操纵性运动线性化方程,如下式所示:
1.1.1 船舶操纵线性相应方程
在工程实用中,往往更关注首向角φ及其角速度r随时间变化的规律。对于一般的船舶,由于操舵速度是有限的,且船舶本身惯性很大,对舵的响应基本是一种缓慢运动,在操舵不是很频繁的情况下,由线性化的水动力模型可以导出关于r的一阶方程:

式中:
方程式(2)即为野本兼作的一阶线性KT响应方程[3],也称为野本方程。
1.1.2 船舶操纵非线性相应方程
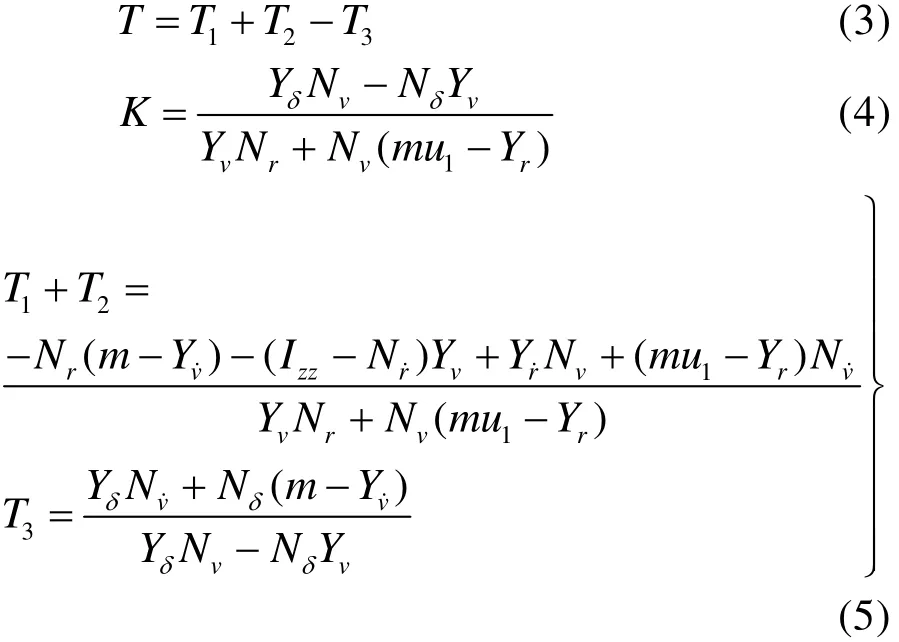
船舶二阶线性响应模型为

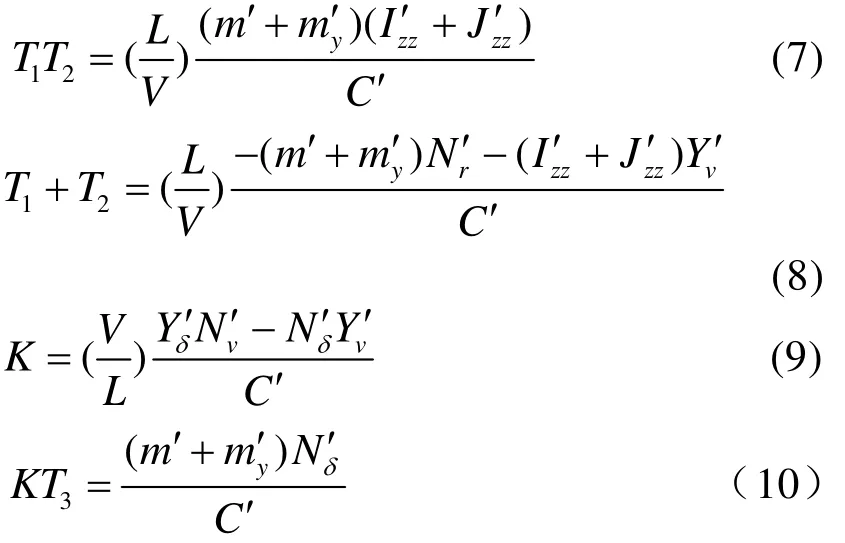
二次方程可以在“线性平均”的意义上用于描述中等幅度的操纵运动。这时上述方程中隐含的流体力导数不再是ν,r为零时的流体动力曲线的斜率,而是采用运动状态为ν和r时有关动力曲线的斜率。因此在非线性情况下,各种线性流体动力导数将依赖于r的变化,系数K、T1T2、(T1+T2)和KT3由各种线性流体动力导数组成,即:
类似于线性化一阶KT响应方程,式(6)对于一阶系统也近似有效,即

1.2 计算机仿真模型
直接从水面船舶平面操纵运动基本微分方程式(1)出发,求出作用于船体上的力后,进一步求解时域微分方程就可以实现对船舶操纵性运动进行计算机仿真,求得船舶操纵运动的动态特性,以及船舶运动的轨迹和航向的时域特性。由于本文是研究三体船操纵运动的动态特性的计算机仿真,所以舵是通过估算设计出的,未对三体船舵的设计问题进行深入研究。采用龙格—库塔法求解三体船操纵运动的动态特性的计算机仿真微分方程,在不考虑船舶的横摇与纵摇对船舶影响的情况下三体船操纵特性预报和操纵运动的动态特性的计算机仿真方程组如下:
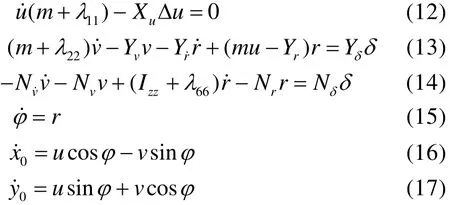
联立求解式(12)-式(17)即可以求出各种舵角下的舰船运动轨迹。
2 水动力导数计算
船舶操纵性各数学模型中的系数是水动力导数或其组合值,所以各水动力导数确定(本文指计算确定)是船舶操纵性研究和操纵运动计算机仿真的重要环节。就目前的发展水平来言,水动力导数的计算方法有回归公式法,势流理论方法以及粘性流体CFD方法[4]等。势流理论方法以及粘性流体 CFD方法又细分为计入波面影响和不计波面影响(静水面假设)两种阶次的。由于回归公式法和不计波面影响的势流理论方法对求解水动力导数的数学物理模型计算简便,且对计算结果精度影响不大,本文选择上述两类方法作为三体船操纵性研究和仿真中水动力导数计算方法。
2.1 水动力导数数值计算分析
三体船操纵性水动力导数计算中要沿用单体船水动力导数估算方法并加以修正,此时面临着对所谓“三体问题”进行处理。本文处理三体问题的方法如下:1)采用三片体分离模型(即 MMG模型)的总体思路处理三体问题;2)由于坐标系原点取在主船体水线面中点(1/2船长处),故在侧体力矩类水动力导数计算中需进行坐标变换(即力矩的移轴定理应用);3)片体间水动力干扰问题的分析处理。
通过运用切片理论[5,6]、细长体理论[7]和三维面元法,并结合“三体问题”的处理原则,对各水动力导数进行求解。对三体船而言,上述三维面元法的优点是可将三个片体视作整体一并解出其绕流速度势,这样得出的结果自然包含了片体间的水动力干扰作用,而经验公式方法、切片法、细长体理论等计算方法在求解三体船水动力中是不具有这一优点的。
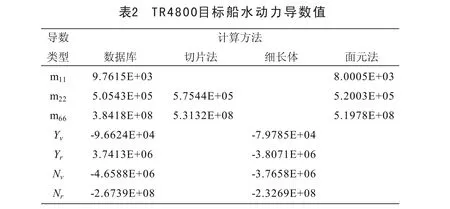
2.2 实例计算
本文对目标船进行操纵运动计算机仿真,其主尺度参数和仿真结果见表1和表2。
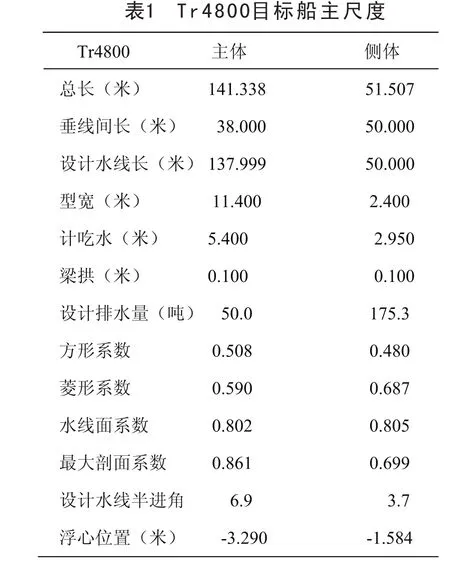
按照三体船操纵运动数学模型,对三体目标船型操纵运动进行计算机仿真,绘出相应的仿真计算结果图形。
3 三体目标船操纵运动仿真
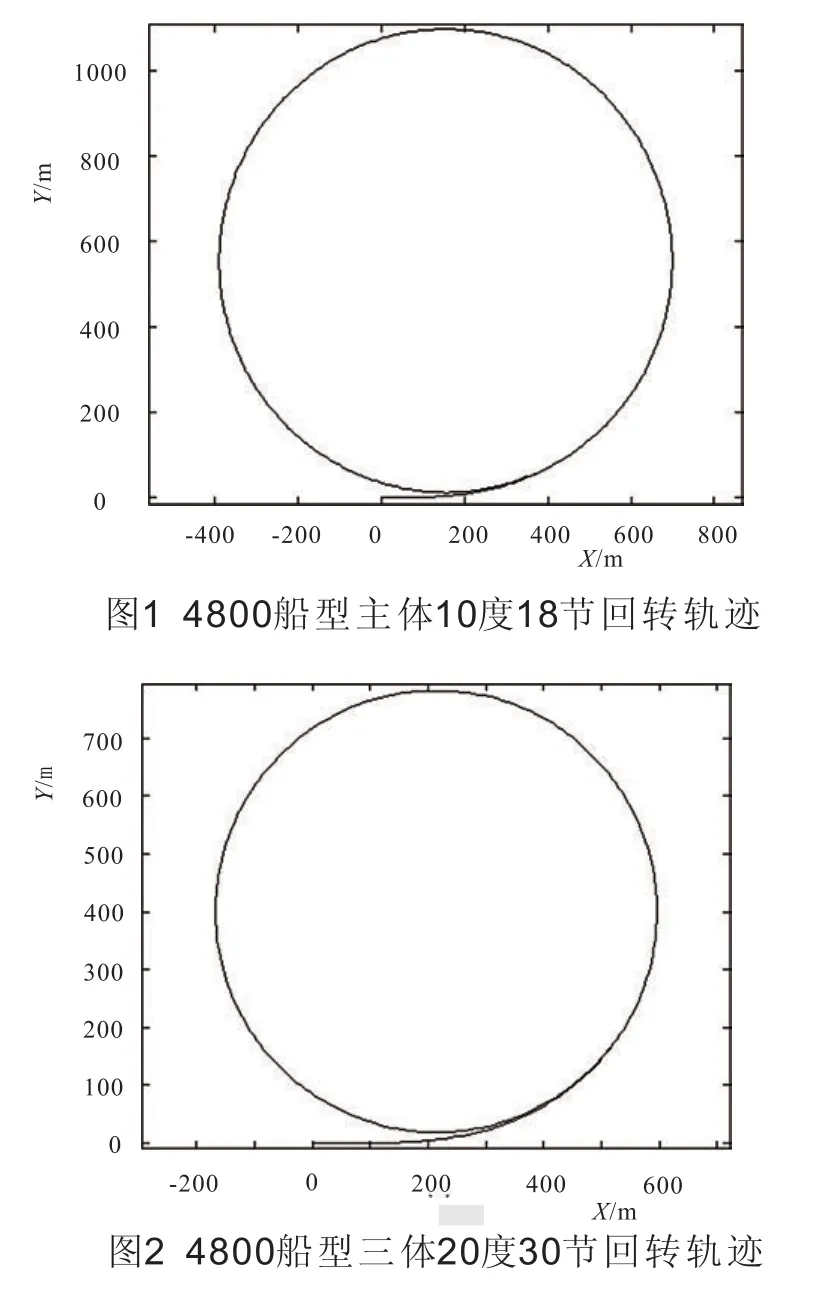
3.1 三体船回转轨迹仿真
在不同舵角与不同航速下对目标船型回转过程中的运动轨迹进行计算机仿真,计算结果如图1、图2所示。
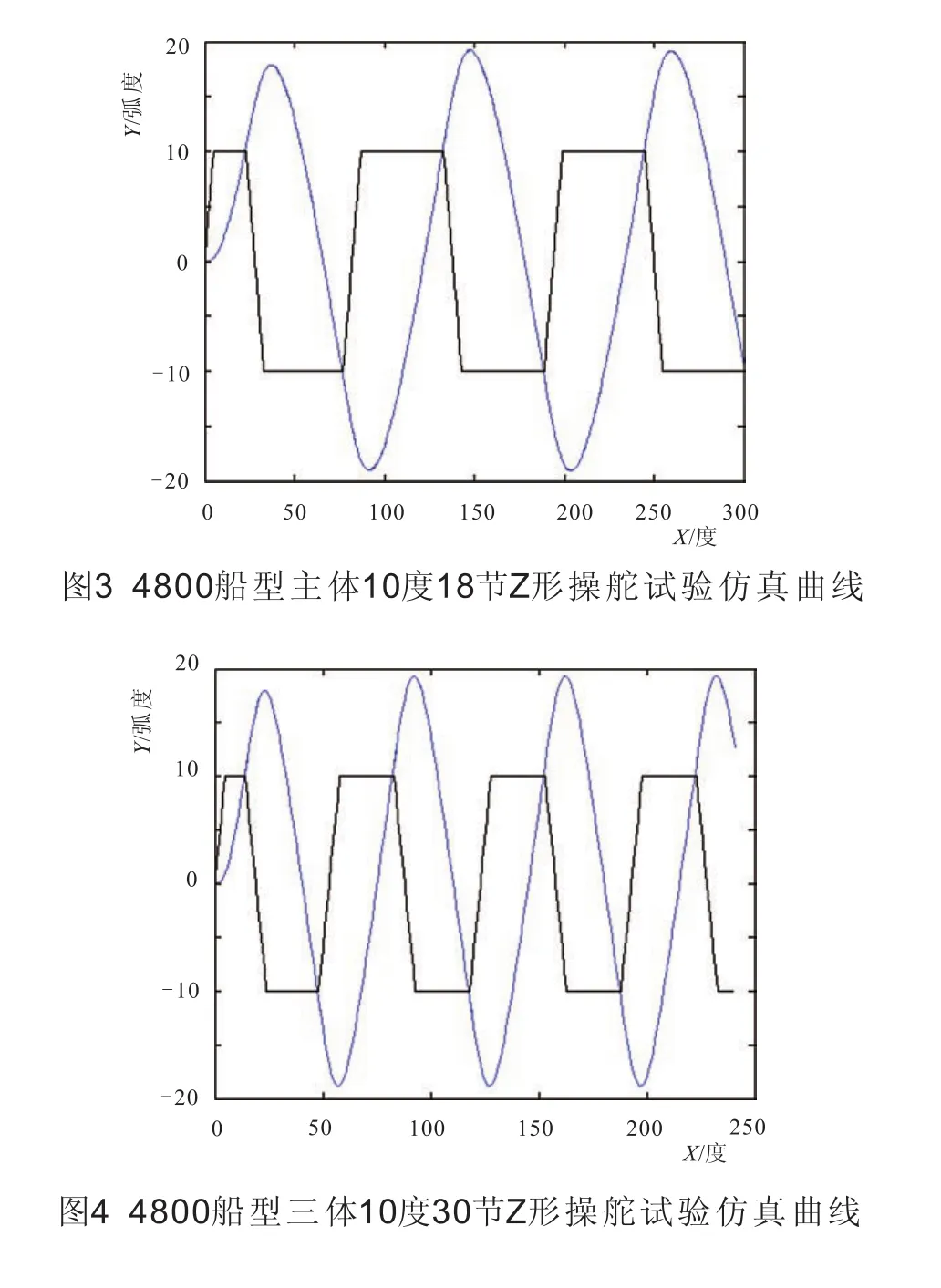
3.2 三体船Z形试验轨迹仿真
在不同航速下对目标船型进行Z形试验的运动轨迹进行仿真,计算结果如图3、图4所示。
4 结语
本文围绕三体船的操纵性展开研究,在选取适用于三体船操纵运动仿真的数学模型的基础上,对目标船型的操纵性水动力导数进行计算,根据计算得到的水动力导数按本文所采用的船舶运动方程对三体船回转运动轨迹、Z形操舵试验曲线等进行了计算机数值模拟和仿真,得出了典型的操纵运动数值仿真计算曲线,为三体船研发积累了技术资料,提供了技术支撑。
:
[1]卢晓平,郦云,董祖舜.高速三体船研究进展[J].海军工程大学学报,2005, (2):43-48.
[2]吴秀恒,刘祖源,施生达.船舶操纵性[M].北京:国防工业出版社,2005.
[3]盛振邦,刘应中.船舶原理[M].上海:上海交通大学出版社,2004.
[4]王燕飞,朱军,张振山.评估水动力系数对潜艇操纵性影响的一种方法[J].船舶力学, 2005,9(5):61-68.
[5]West R E,Hime W G.Chloride profiles in salty concrete [J].Material Performance,1985,24(7):29-36.
[6]马山,宋竞正,段文洋.二维半理论和切片法的数值比较研究[J].船舶力学,2004,8(1):35-43.
猜你喜欢
中学生数理化(高中版.高二数学)(2021年4期)2021-07-20 07:18:48
广东造船(2021年2期)2021-05-23 12:16:39
数学大世界·中旬刊(2017年3期)2017-05-14 17:41:25
高中生学习·高三版(2016年9期)2016-05-14 14:05:08
舰船科学技术(2016年1期)2016-02-27 15:39:15
舰船科学技术(2015年9期)2015-12-23 11:00:08
浙江海洋大学学报(自然科学版)(2015年2期)2015-08-28 14:36:40
新高考·高二数学(2014年7期)2014-09-18 17:56:35
船舶(2012年4期)2012-08-11 01:48:36
首都经济贸易大学学报(2012年1期)2012-05-14 06:39:01