直流并联系统稳定性分析方法
2013-08-10 02:56:48侯朋飞徐晔崔陈华王金全宋鹏超
船电技术 2013年9期
侯朋飞,徐晔,崔陈华,王金全,宋鹏超
(解放军理工大学,南京 210007)
0 引言
随着分布式能源发电系统的发展,电力电子装置在其中的作用显得越来越重要,在实际电源系统中,必然涉及各电源模块级联、并联、串联、组合等多种协同工作形式。各子系统之间相互作用对电源系统整体性能包括稳定性分析、稳态动态性能、谐波电能质量及电磁干扰等相关领域产生决定性影响,使得电源管理难度加大。与此同时,各模块可能来自不同供应商,在电源模块逐步标准化以适应工业界需求的同时,模块间的兼容匹配亦需要规范定义以确保通用性与互换性,从源头解决系统集成后性能下降甚至震荡不能正常工作的问题。
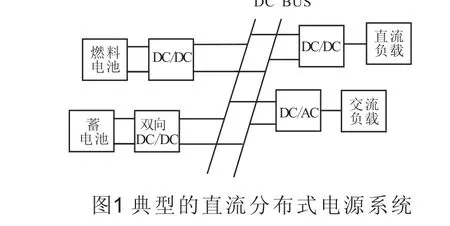
对于直流分布式系统而言,通常柴油机组经过整流器连接到直流电网,蓄电池经过双向DC/DC连接到电网。负载侧通过DC/DC变换向直流负载供电,通过 DC/AC向交流负载供电。如图1所示为直流分布式系统。
先前的系统稳定性分析方法需要已知模块内部结构及参数且判据复杂,基于单个模块阻抗测量的稳定性分析方法只需已知并联系统的均流方法和工况。一般测量单个模块独立运行时的输出阻抗是通过并联系统总输出阻抗与单个模块独立运行时的输出阻抗之间的关系来获得总输出阻抗,根据并联系统输出阻抗是否存在右半平面极点来判断并联系统的稳定性。
1 基于主从均流模式的并联系统总输出阻抗
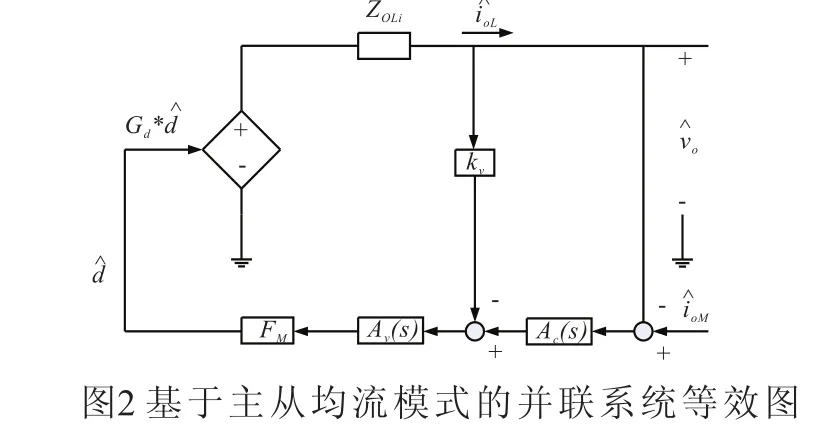
如图2所示为基于主从均流模式的并联等效电路图。当均流通讯线接口悬空时,电压环起作用,均流环无效。当均流通讯线接口接恒压源时,均流指令信号扰动为 0,输出阻抗包含均流调节器信息[1]。

其中ZOM为主模块的输出阻抗,ZOi为均流通讯线悬空时从模块i的输出阻抗,Zcsi*为均流通讯线接恒压源时从模块 i的输出阻抗。此时系统的总输出阻抗为:

2 基于平均均流模式的并联系统总输出阻抗
同样,基于平均均流模式的并联系统的等效图如图3所示[4]。

并联时模块 i的输出阻抗为:
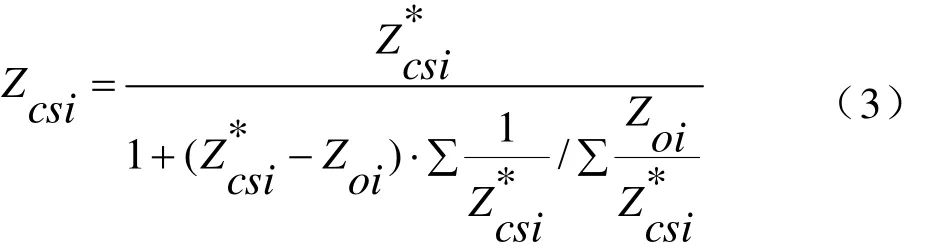
Zoi为均流通讯线悬空时模块i的输出阻抗,Zcsi*为均流通讯线接恒压源时模块i的输出阻抗[2]。因此,并联系统的总输出阻抗为:

其中Zcsj为并联运行时模块j的输出阻抗,ZOj为均流通讯线悬空时模块j的输出阻抗,Zcsj*为均流通讯线接恒压源时模块j的输出阻抗[3]。
3 并联系统总输出阻抗获取方法的仿真验证
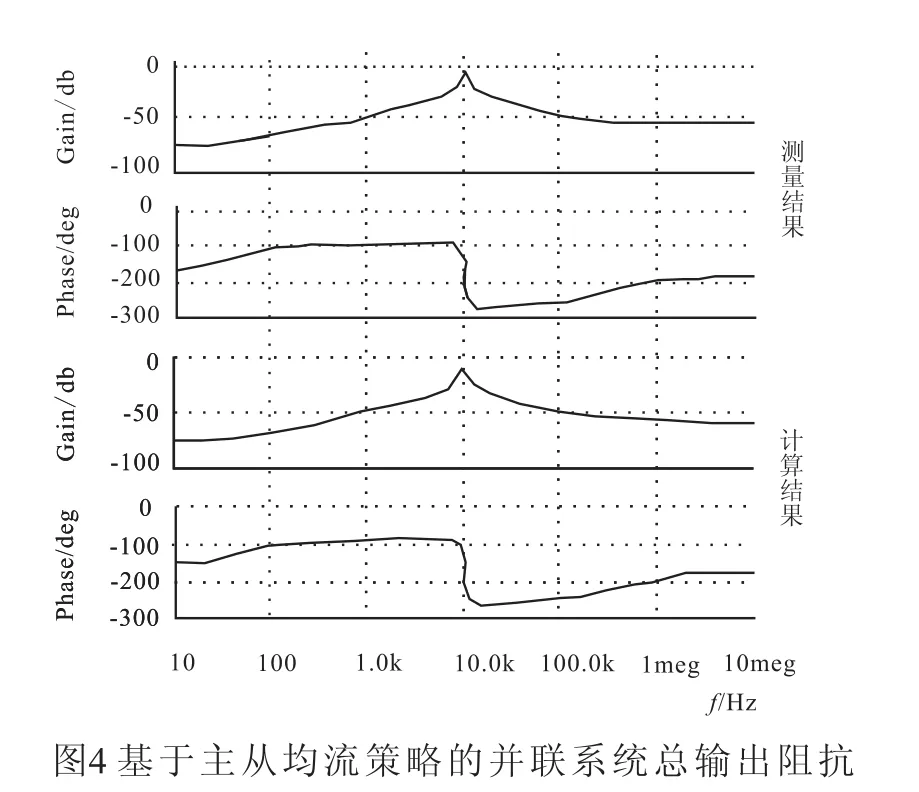
如图4所示为基于主从均流策略的并联系统总输出阻抗 Bode图,该图表明了输出阻抗的幅值和相位随着频率的变化情况。其中上图为直接测量的结果,下图为计算得到的结果。通过比较可以看出,测量结果和计算结果基本吻合,因此基于主从均流模式的并联系统的输出阻抗获取方法得到验证。

如图 5所示为基于平均均流策略的并联系统总输出阻抗 Bode图,其中下图为直接测量的结果,上图为计算得到的结果。通过比较可以看出,测量结果和计算结果基本吻合,因此基于平均均流模式的并联系统的输出阻抗获取方法得到验证。
4 并联系统稳定性分析的仿真
对于并联系统的总输出阻抗而言,若总输出阻抗不存在不稳定(RHP)极点,则该并联系统稳定,若存在不稳定(RHP)极点,则该并联系统不稳定。
如图6所示为在Matlab中仿真得到的稳定并联系统的总输出阻抗 Bode图,从该图中可以看出不存在RHP极点。

如图7所示为上述并联系统的时域仿真结果图,由图中可以看出并联系统的输出电压存在震荡现象,输出电流存在较大纹波,表明该系统是不稳定的。
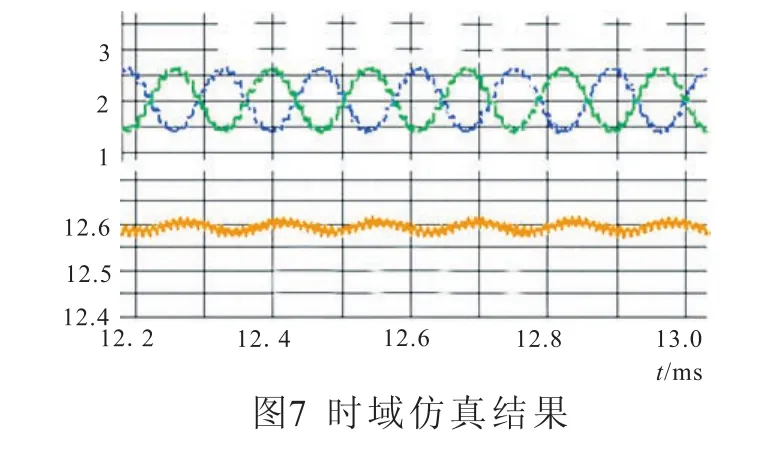
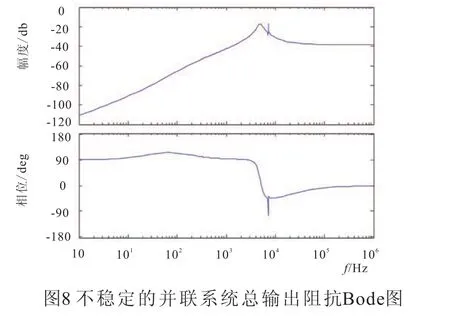
图8为Matlab中改变参数获得的不稳定并联系统输出阻抗Bode图,由图可以看出该Bode图在7.2 kHz的时候存在RHP极点。
5 并联系统稳定性分析的实验验证
通过上面的分析,采用直流电源作为并联系统的供电电源,两个 DC/DC电力电子负载并联运行,使用网络分析仪对并联系统的输出阻抗进行测量。分别对一个稳定系统(实验 1)和一个不稳定系统(实验2)进行测量。
对于并联输出的电压,在时域的仿真结果如下图9所示:
仿真与实验很好的结合起来,对于仿真的稳定系统,其对应的实验系统也是稳定的,并联输出阻抗没有RHP极点。实验2的仿真结果如下图所示:
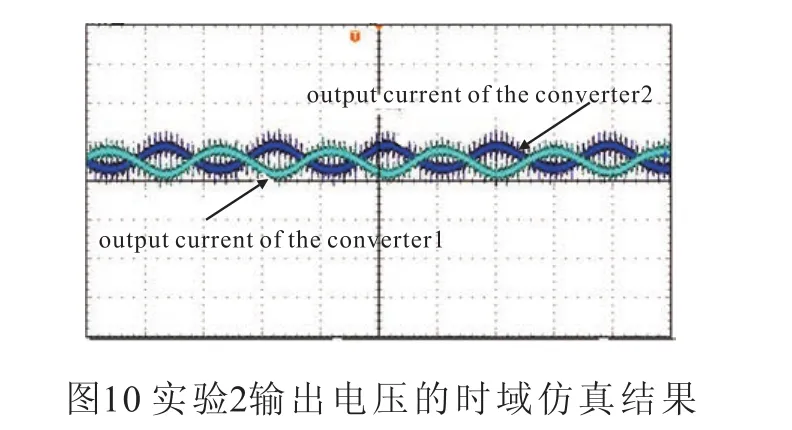
对于实验2的不稳定系统,仿真中其输出电压出现大量纹波,系统不稳定,实验中系统的输出阻抗Bode图中有RHP极点,实验很好验证了仿真结果。
6 结论
本文分析了直流分布式系统的结构,在直流分布式系统中多个电力电子模块的并联会造成不稳定现象,然后分析了基于主从均流模式的并联系统总输出阻抗和基于平均均流模式的并联系统总输出阻抗,并对并联系统输出阻抗方法进行验证,在Matlab中对并联系统稳定性进行仿真,实验校验了仿真的正确性。
:
[1]张卫平. 开关变换器的建模与控制. 北京:中国电力出版社,2006.
[2]丁道宏. 电力电子技术,北京:航空工业出版社,1999.
[3]张占松,蔡宣三.开关电源的原理与设计[M].北京:电子工业出版社,2004.
[4]王兆安,黄俊.电力电子技术[M].北京:机械工业出版社,2007.
猜你喜欢
中学生数理化·中考版(2021年10期)2021-11-22 07:26:40
制造技术与机床(2017年6期)2018-01-19 02:41:22
中国环境监察(2016年7期)2016-10-23 05:36:30
现代工业经济和信息化(2016年8期)2016-05-17 05:37:35
通信电源技术(2016年1期)2016-04-16 04:57:26
电测与仪表(2016年24期)2016-04-12 00:21:04
电测与仪表(2016年24期)2016-04-12 00:20:58
通信电源技术(2016年5期)2016-03-22 01:09:37
西部广播电视(2015年10期)2016-01-18 03:46:14
探测与控制学报(2015年4期)2015-12-15 15:00:56