基于专家系统和神经网络的雷达伺服系统故障诊断方法
2013-08-10 10:21陶敏丁求启张桂平
电子设计工程 2013年11期
陶敏,丁求启,张桂平
(中国卫星海上测控部 江苏 江阴 214431)
随着科学技术的发展,特别是计算机技术的发展和应用,船载雷达伺服系统呈现出高度自动化、信息化、系统化和智能化的发展趋势,其系统的复杂性也越来越高,但同时船载雷达伺服系统的维护难度也越来越大,单对某一或局部信号的检测或采用单一的故障诊断方法往往很难对系统进行全面彻底的诊断,而且诊断效率较低,经常造成误拆好的部件和进行的“无故障”维修[1]。因此,伺服系统故障诊断方法的研究就显得格外重要。神经网络方法基于人脑的组织模式,将众多结构和功能极其简单的神经元通过各种方式连接成一个复杂的网络结构,以实现复杂的智能行为。神经网络具有很强的自学习能力,能够自动地从训练样本中学习领域知识,具有很强的自适应能力,近年来,神经网络被广泛地用来解决工程实际问题,为复杂系统的故障诊断提供了一条新的解决途径。
文中针对雷达伺服系统的结构和故障特点,采用分层次的思想,将神经网络和专家系统等智能诊断技术有机结合,设计了一种现代雷达伺服系统智能诊断系统,并对其主要功能模块实现和关键问题进行了研究。
1 雷达伺服系统简介
雷达伺服系统主要由天线控制单元、天线驱动系统、伺服监控单元、天线设备及轴角编码器五大部分组成,其控制对象为天线座。控制指令由控制单元产生,并送至驱动单元,驱动单元根据接收到的命令控制电机转动带动天线旋转到指定位置,同时轴角编码器采集天线的实时角度信息,完成闭环控制。
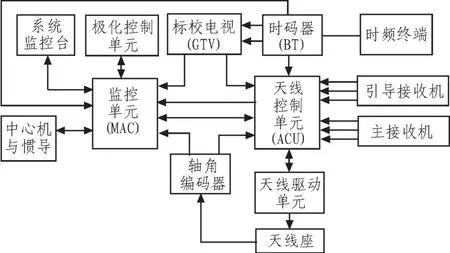
图1 伺服系统组成框图Fig.1 Structure diagram of servo system
2 智能诊断系统的总体结构框图
现代雷达伺服系统结构日趋复杂,但仍然具有明显的层次型特点,即可按分系统、分机箱、功能单元、电路板、元器件的顺序逐层向下扩展。系统结构的层次性,势必使故障也具有层次性的特点。因此,采用分层次分模块的诊断策略可大大降低诊断的复杂程度。
诊断技术的融合有多种方式,应遵循充分发挥各自优势,相互弥补缺点的原则,找到各种诊断技术的“最佳结合点”。通过对现代雷达伺服系统结构、故障特征及各类智能诊断技术的特点分析,本文以传统的专家系统为主体,使用神经网络解决知识获取的“瓶颈”和复杂故障推理为辅,采用基于知识的专家系统推理机制[2]和数值计算的神经网络推理机制[3]相结合的方式,构建一种现代雷达伺服智能故障诊断系统,其总体结构如图2所示。
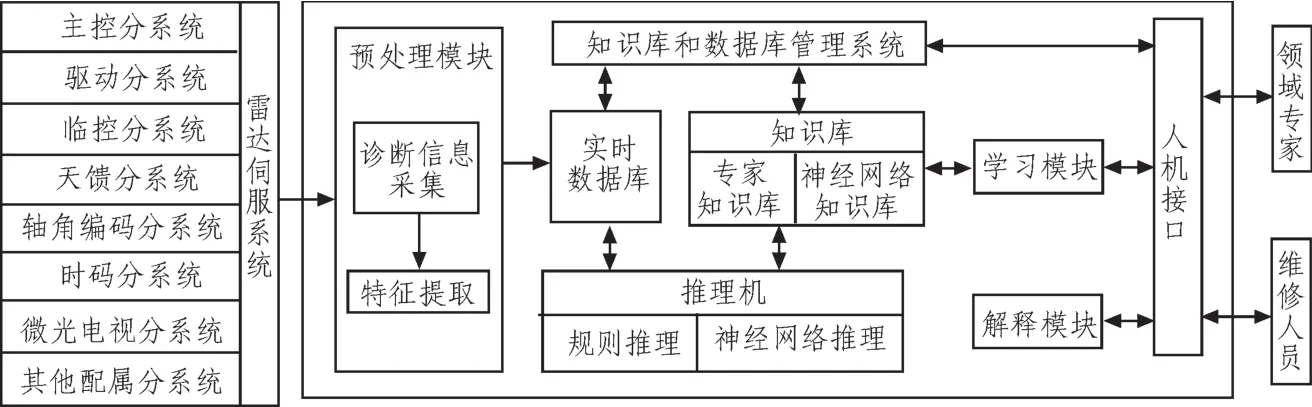
图2 雷达伺服智能故障诊断系统结构框图Fig.2 Structure diagram of radar servo intelligent faults diagnosis system
系统主要包括预处理模块、实时数据库、知识库、推理机、知识库和数据库管理系统、学习模块、解释模块和人机接口。预处理模块主要完成诊断信息的采集和特征提取。人机接口是领域专家和雷达伺服岗位人员实现对诊断系统进行管理、控制的渠道。解释模块负责向岗位人员解释诊断过程和结果。
3 雷达伺服系统级故障诊断方法
伺服系统级专家诊断系统的逻辑结构图如图3所示。它由知识库和推理机组成。专家将诊断的知识,经验加以总结,形成规则,例如伺服主控台角度信息无变化,引起此故障的原因有天线驱动单元故障和轴角编码器故障,如果天线转动正常,那么由此可以推出轴角编码器发生故障。将类似的规则存入计算机建立知识库,使计算机拥有本领域内专家的知识;推理机是一个软件系统,运用知识库提供的关于规则和数据的两类知识,进行自动推理、求解问题[4]。
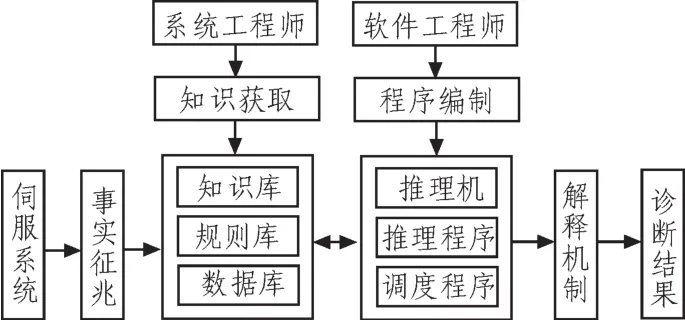
图3 系统级专家诊断系统的逻辑结构图Fig.3 Logic block diagram of expert diagnosis system
专家系统知识库的建立,系统仿照故障字典来获取知识。基本思路是:提取各个分系统在故障状态下的特征值,然后将特征值与故障的对应关系列成一个字典。诊断时按照测量得到的实际值在故障字典中进行检索,比较和判断出故障的性质和位置[5]。
本文所建立的专家系统为基于规则的诊断专家系统,推理规则格式采用“IF…Then…”语句。实测数据采集进来后与故障征兆集中特征数据进行对比,只要条件匹配,则Then后的语句被执行,进行推理,进入下一步判断,再一次执行上面的推理过程,直到定位于故障分系统。
4 雷达伺服分系统级故障诊断方法
4.1 诊断参数的采集及选取
4.1.1 诊断参数的采集
诊断参数的采集在故障诊断系统中占据重要角色。对于诊断系统而言,采集的信息越多,越容易对故障进行定位和判断,分系统级的故障诊断要将故障定位于具体的板卡或是元器件,所以更突出了其重要性。为此系统将增加必要的硬件设计,同时为减小伺服系统硬件设计的复杂程度,更具伺服系统的特点和专家的经验总结,利用伺服系统自身必须硬件连接,增加少量硬件设计,组成采集单元。
在伺服系统的硬件在线故障检测中,诊断系统将伺服系统的接插件依据系统功能和物理位置进行分组,分在一组的接插件串连在一起,接至伺服系统检测I/O板,对于智能化硬件,如板卡、驱动器等,直接与其通信,读取特征字,作为其特征参数。
对于天线驱动系统,由于驱动器本身是智能化、数字化的,其安装的数字化仪表可以将测量值直接送出,例如电机电流、电压、转速等。驱动系统的核心器件功率放大器,其本身带有自诊断功能,可以根据其输入输出情况给出故障参数。
时码编码系统的数据采集包含天线角度、时码及编码系统,这一部分主要根据板卡知识进行特征参数检测。如激磁信号、电源电压、处理板中处理器工作情况等。
如操作杆、操控按键板等其他模块,利用板卡对其数据进行采集分析后作为特征参数。
4.1.2 诊断参数的选取
根据故障机理,若某一故障发生,则其特征参数将发生较大变化。因受各种因素影响,尽量不以绝对值作为异常诊断的依据,而要与初始值或正常值进行比较,用其比值作为检测参数来进行诊断,例如轴角编码器发生故障时,测量其电压值,再与正常时的电压进行比较,作为其特征参数。为此,诊断的检测参数定义为:

式中 ST(xi)为相对于 xi的待检状态参数值,SR(xi)为相对于xi的正常状态参数值。两者的比值与一门限值进行比较,若大于门限值,故障征兆输入取为“1”,即故障征兆存在,否则则去为“0”,则故障征兆不存在。
4.2 知识库的建立
它包括知识获取和知识存储两个过程。知识获取表现为训练样本的获取与选择。训练样本来源于同类型诊断对象在正常运转时和带故障运行时的各种特征参数。知识存储是将由训练样本对神经网络进行训练获得的连接权值和阈值进行存储,从而形成知识库。其建立过程如下:
针对各分系统特点,分析分系统故障知识结构、根据征兆、故障及样本数目确定神经网络的结构模型,即输入神经元、输出神经元以及隐含层神经元的数目;
在众多的样本中选取训练样本,即根据对象特点及专家长期积累的经验获得各种情况下(单故障或多故障)神经网络的训练样本;
利用样本进行网络训练,则可获得网络的连接取值和阈值,存储连接权值和阈值形成知识库。
4.3 BP神经网络
BP神经网络的工作过程通常由两个阶段组成[6]。一个阶段是工作期,在这一阶段网络各节点的连接权值固定不变,网络的计算从输入层开始,逐层逐个节点地计算每一个节点的输出,直到输出层中各节点计算完毕。另一阶段是学习期,在这一阶段,各节点的输出保持不变,网络学习则是从输出层开始,反向逐层逐个节点地计算各连接权值的修改量,以修改各连接的权值,直到输入层位置。这两个阶段又称为正向传播和反向传播过程。在正向传播中,如果在输出层的网络输出与所期望的输出相差较大,则开始反向传播过程,根据网络输出与所期望输出的信号误差,对网络节点间的各连接权值进行修改,以此来减小网络输出信号与所期望输出的误差。BP神经网络,正是通过这样不断进行的正向传播和反向传播的计算过程,最终使得网络输出层的输出值与期望值趋于一致。神经网络的训练算法如下:
1)网络训练开始时,权值和节点阈值初始化为一组随机数;
2)输入 P 个训练样本,分别为(X1,X2,…,XP);且设定预期的输出即对应的一组教师值为(T1,T2,…,TP);
3)运用BP学习算法在经过网络的代价函数计算后,将实际输出(Y1,Y2,…,YP)与(T1,T2,…,TP)的误差逐层向输入层方向逆向传播,使网络不断自适应地修改网络的连接权值和节点阈值,以减小代价函数值;
4)使YP与TP尽可能地接近,直到它减小至一个可以接受的阈限值或者不再减小为止。设为迭代次数,权值和阈值的修正公式分别为:
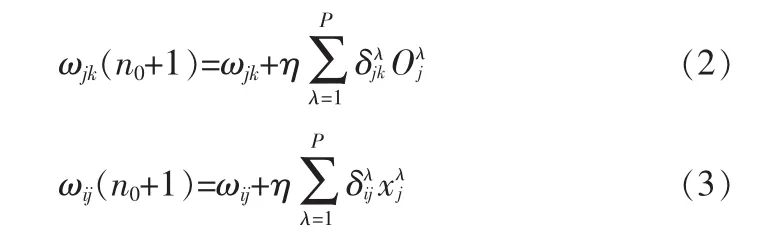
式中η为步长:
当P个训练样本学习时的总误差E满足下列条件,即

则停止迭代过程,网络的连接权值和节点阈值训练完成。其中ε为任意给定的正小数,它取决于网络训练所希望得到的精度。
神经网络知识表示是一种知识的隐式表示,知识表现为网络的拓扑结构和连接权值,采用神经网络技术的专家系统,由于神经网络是一种信息存储和处理统一的网络系统,因此,在采用神经网络技术的专家系统中,知识的存储与问题求解过程中的推理过程均在系统的神经网络模块中进行,是推理机和知识库的统一。三层BP神经网络采用数据驱动正向推理的故障诊断策略,即从初始状态出发,向前推理到达目标状态为止,其故障诊断步骤为:
1)将故障样本输入给输入层各节点,同时它也是该层神经元的输出;
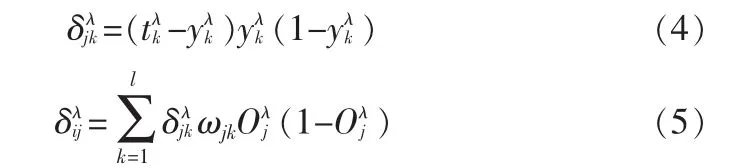
2)由式(2)求出隐层神经元的输出,并将其作为输出层的输入;
3)从式(4)求得输出层神经元的输出;
4)由阈值函数判定输出层神经元的最终输出结果。我们用表示故障类型,则故障类型阈值判定函数为:

其中φk为伺服分系统中由领域专家设定的阈值。
4.4 知识处理
在神经网络专家系统中,只需将观测到的故障现象通过编译器转化为数值知识,送入神经网络,然后计算网络输出,最后将网络的数值输出经反编译器转化为符号知识,即得到了故障原因,这种专家系统的知识处理是与神经网络的结构紧密相关的统一体,不需增加相应的推理机构,将数值知识转换为符号知识的反编译器是编译的逆过程,有与编译器类似的结构。在故障诊断中尽管诊断的最终结论是唯一的,但由于维护人员提供的故障表现初始描述不完备,还由于故障表现的初始描述与故障非一一映射关系,我们还采用了缺省推理和询问推理机制。基于上述两种推理机制,基于神经网络和专家系统的分系统级故障诊断方法知识处理过程如下:
1)获得故障表现的初始描述;
2)正向推理(从编译器到计算网络输出,并考虑缺省推理);
3)若已得到故障原因,给出修复意见,退出;否则进入步骤 4);
4)反向搜索(按询问推理的算法进行)以便找到一个对于推理不可缺少的缺省节点,请用户回答该节点的值;
5)转步骤 2)。
5 结束语
文中针对故障诊断[7]的特点,结合伺服系统的实际情况,采用分层次的思路,将神经网络与专家系统集成于雷达伺服系统的故障诊断。该诊断方法为雷达伺服系统的故障诊断研究提供了一条好的途径,具有很高的实用价值。
[1]王晗中,杨江平,张爱元.现代雷达装备综合智能故障诊断系统设计[J].现代雷达,2008,30(11):18-22.WANG Han-zhong,YANG Jiang-ping,ZHANG Ai-yuan.Design of an intelligent fault diagnosis system for modern radar equipment[J].Modern Radar,2008,30(11):18-22.
[2]尹朝庆.人工智能与专家系统[M].2版.北京:中国水利水电出版社,2009:120-132.
[3]胡霄楠,史忠科.BP神经网络在雷达故障诊断中的应用研究[J].计算机测量与控制,2006,14(12):1660-1662.HU Xiao-nan,SHI Zhong-ke.Application research of BP neural network in fauly diagnosis of radar[J].Computer Measurement&Control,2006,14(12):1660-1662.
[4]张绪锦,谭剑波,韩江洪.基于BP神经网络的故障诊断方法[J].系统工程理论与实践,2002(6):61-66.ZHANG Xu-jin,TAN Jian-bo,HAN Jiang-hong.A method of fault diagnosis based on BP neural network[J].Systems Engineering-theory&Practice,2002(6):61-66.
[5]万其,吴燕,陈桂.雷达伺服系统的专家故障诊断技术[J].现代雷达,2007,29(8):86-88.WAN Ji,WU Yan,CHEN Gui.Fault diagnosis expert system for radar Servo-systems[J].Modern Radar,2007,29(8):86-88.
[6]李合平,朱宏,张志强,等.基于神经网络和专家系统的雷达故障诊断方法[J].微计算机信息,2008,24(9):216-218.LIGe-ping,ZHU Hong,ZHANG Zhi-jiang,etal.ONE method of faults diagnosis based on neural network and expert system for radar[J].Control&Automation,2008,24(9):216-218.
[7]魏江涛,陈方涛,姜美雷.BP神经网络在设备故障诊断方面的应用[J].现代电子技术,2012(19):131-134.WEI Jiang-tao,CHEN Fang-tao,JIANG Mei-lei.Application of BP neural network in fault diagnosis of radar device[J].Modern Electronics Technique,2012(19):131-134.
猜你喜欢
成都信息工程大学学报(2022年3期)2022-07-21
北京航空航天大学学报(2022年6期)2022-07-02
沈阳师范大学学报(教育科学版)(2021年2期)2021-02-01
制造技术与机床(2019年6期)2019-06-25
测控技术(2018年12期)2018-11-25
自动化学报(2017年7期)2017-04-18
现代电子技术(2016年15期)2016-12-01
中国交通信息化(2016年9期)2016-06-06
北京航空航天大学学报(2016年4期)2016-02-27
图书馆研究(2015年5期)2015-12-07