舰艇编队目标信息融合功能模型的构建*
2013-08-10 09:23许锦洲管维伟
舰船电子工程 2013年1期
赵 虎 许锦洲 管维伟
(1.海军蚌埠士官学校 蚌埠 233012)(2.海军指挥学院 南京 211800)
1 编队指挥中心目标信息来源
1.1 编队兵力组成
在现代海战中,参战双方的舰艇通常是以编队的形式在海上保持存在。以典型的航母编队为例:它通常由1艘航母、2架预警机、2~3艘反潜/防空驱逐舰、1~2艘攻击型核潜艇、1~2艘后勤支援舰组成。航母编队随时都有可能遭受来自空中、海上和水下的攻击。为满足防空、反潜和反舰作战需求,必须建立远中近、高中低搭配的战场目标信息获取通道;打造远程对空防御、中程区域防御和近程点防御的“分层防御”体系;并综合使用航母舰载机、各种舰用导弹、火炮和电子侦察、电子对抗等软硬武器,才能有效地做到攻防。编队中各平台搭载的多种传感器系统的使命则是为编队提供预警和确保武器威力的正常发挥。由于对水下目标有独立的探测感知系统,因此本文仅考虑海战场水面和空中目标。
1.2 单舰指挥中心目标信息来源
不论附属舰还是指挥舰对空中和海上目标都使用了多型雷达、电子侦察、光电侦察(红外警戒、红外跟踪、光电跟踪、激光测距)等多种实时探测设备,以实施对海战场的侦察监视。这些探测设备在传感器特性、探测距离、探测区域,以及对不同的环境和目标特性方面各有不同,因此在作战中一般采用分布式组配使用,共同构成单舰实时目标情报侦察系统,如图1所示。
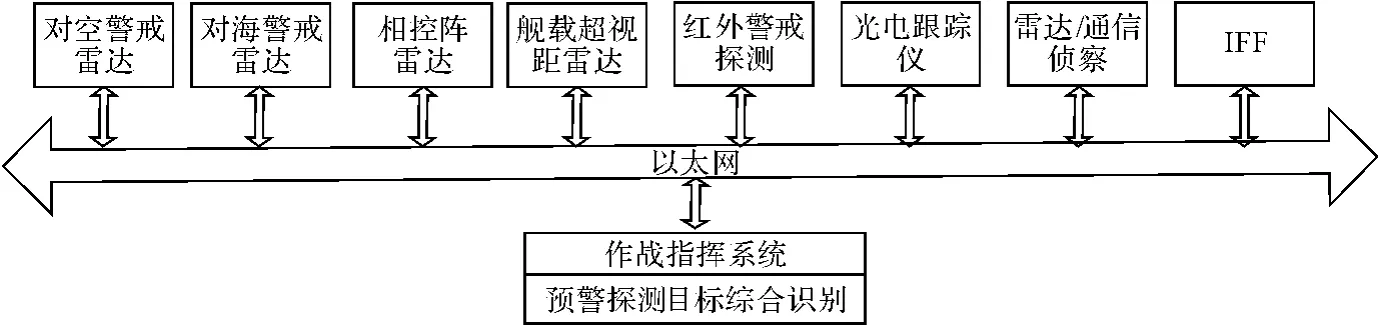
图1 单舰传感器配置
1.3 编队指挥中心目标信息来源
编队目标信息来源于编队内各附属舰、指挥舰和预警机。附属舰完成本舰各传感器提供的目标信息融合,形成本舰作战区域的目标状态估计和识别[1]。而编队目标信息融合是对各平台传感器目标信息的协同使用和融合,使编队内的各平台及传感器系统有机地融合成一体,实现目标信息的联合探测和共享[2]。
图2具有上下级隶属关系,同时又具有舰艇之间信息交接和共享能力。各成员舰艇在各自的分配区域,攻防功能上自身是个完整的信息融合结构,还能与编队其他成员形成完善的网络体系结构[3]。

图2 编队指挥中心目标信息来源关系
图2有4个目标信息交换节点:F11表示指挥舰本舰指挥中心与附属舰对空信息的融合点;F12表示指挥舰本舰指挥中心与附属舰对海信息的融合点;F21表示编队指挥中心与指挥舰本舰指挥中心对空信息的融合点;F22表示编队指挥中心与指挥舰本舰指挥中心对海信息的融合点。
附属舰之间不进行融合,即不展开附属舰之间传感器系统的信息融合。由指挥舰编队融合中心向各成员舰分发一致的态势。
这种体系结构优点:一方面附属舰具有完整自治的对空、对海能力;另一方面编队也有完整的对空对海综合能力,这样编队信息可以充分共享。一旦从编队融合中心发现对空或对海防御不足,可以通过指挥中心调整来应对。这种结构需要强力的数据链、计算机网络、软件的支持[3]。
2 编队目标信息组织结构
栅格化的网络为编队范围内传感器系统探测的网络化,以及多个层次上的融合提供了可能[4],如图3所示。

图3 编队目标信息组织结构
图3所示的编队目标信息融合组织结构,以编队内传感器获取的实时信息为主要融合对象,按传感器作用区域和对象划分,可将它们分为三类:
1)远程对空对海。预警机独立完成远程对空海目标信息的获取,通过数据链传送给指挥舰编队融合中心。
2)中程对空对海。主要由舰载中远程警戒搜索雷达、超视距雷达等完成,形成单舰区域内中远程海情和空情的同时,将传感器目标信息送至指挥舰编队融合中心,完成编队区域范围内的中程空情和海情融合;
3)近程对空对海。主要有近程跟踪雷达、光电设备、红外设备和IFF。完成单舰区域内近程对空海目标跟踪信息融合的同时,将各传感器目标信息送至指挥舰,完成编队区域范围内的近程目标跟踪融合。
此外,指挥舰编队融合中心完成编队内电子侦察情报的融合,得到目标方位航迹;目标方位航迹与雷达航迹进行相关判断,若相关则进行融合,同时将电子侦察获取的目标属性与航迹关联起来;反之则开辟新的目标航迹及属性[4]。
3 编队目标信息融合功能模型
3.1 融合原理分析
多个不同的传感器系统探测到同一个目标时,如何组织量测到的数据,获得比单个传感器系统更好的量测结果,是信息融合需要解决的主要问题之一。解决这一问题的方法具体可分为两类:量测融合和状态向量融合[5]。
3.1.1 量测融合
量测融合是信号处理层的数据融合,属于数据级融合。它通过直接融合各传感器的量测数据获取一个加权或组合的量测,然后选择滤波器进行估计。这种方法可以消除各个量测信息的不确定性,提高检测概率[4],其实质是一个分布检测问题。它根据一定的检测准则形成最优化门限[6],然后融合各传感器的量测,并依据该量测进行某一目标的状态估计。从分布检测的角度看,量测融合结构主要有五种,即集中式结构、并行分布式结构、串行分布式结构、树状结构和带反馈并行结构[7]。由于各传感器系统具有独立的量测信息处理能力,而且本文研究的融合结构是基于各传感器系统处理后的状态向量,因此在图4功能模型中没有体现量测融合。
3.1.2 状态向量融合
状态向量融合是基于各传感器系统独立的状态估计值,选择相应的融合算法进行融合,获得一个改善的联合估计值。对雷达传感器系统来说,状态估计值是预处理之后进行点点相关、点航相关和滤波估计得到的雷达目标航迹和目标识别状态向量;对于光电传跟踪仪和“红外搜索与跟踪系统”来说,状态估计值是目标的光电航迹、红外航迹状态向量,及其提供的目标光电及红外特征状态向量;对于雷达侦察设备来说,状态估计值主要是目标的电磁属性特征向量,根据需要也可提供目标方位航迹的状态向量。由于状态估计可由单传感器系统独立完成,而舰艇编队目标信息融合的输入源自多个传感器系统的输出。正因如此,在图4功能模型中没有体现单传感器状态估计的功能。
各传感器系统的状态估计值可分为连续状态向量和离散状态向量,因此目标状态向量融合也分为以下两种融合:
1)目标连续状态向量融合
目标连续状态向量融合即航迹融合。它通过综合来自多个传感器系统的位置信息建立目标的综合航迹文件,主要包括数据配准、航迹关联、滤波及预测,最终完成多传感器系统的航迹合成[6]。从多传感器系统的信息流通形式和综合处理层次上看[7],状态融合结构主要有三种,即集中式、分布式、混合式。
目标连续状态向量融合估计具体包括雷达航迹融合估计、雷达侦察航迹融合估计、雷达形成的主航迹与雷达侦察形成的辅助航迹融合估计;跟踪雷达与“红外搜索与跟踪系统”、光电跟踪仪之间的航迹融合估计。
2)目标离散状态向量融合
每条目标航迹包含属于同一目标的点迹序列,以及由点迹序列计算出来的目标位置、速度等运动学参数、物理特征参数及其他属性数据[5]。单传感器目标识别的任务就是基于上述数据,完成特征信息与目标身份之间的关联与判决。
目标离散状态融合是目标综合识别的过程。它通过对来自多个传感器系统的目标动态信息、目标身份信息进行特征抽取,得到特征向量。对特征向量进行相关分析和融合判决,来确定目标种类、类型、威胁等级等[6],目的是得到目标身份的联合估计。
根据信息抽象程度不同,将目标综合识别分为三种结构:决策层融合,特征层融合和数据层融合[7]。其中,单传感器目标识别处理的对象是传感器原始数据,因此属于数据层融合;目标离散状态融合处理的对象是经过特征抽取后的特征向量,因此属于特征层融合;此外,若融合处理的对象为各传感器系统输出的身份报告时,则属于决策层融合。
3.1.3 状态关联估计
不论是量测融合还是状态向量融合,都离不开关联估计。为量测融合服务的关联处于数据级,主要为航迹的起始、更新以及目标离散属性融合作关联判断。为不同传感器系统间的航迹融合服务的航迹关联,通过批号来区分目标,判断哪些批次的目标是同一目标的过程[7~8]。对于海战场配置的传感器来说,主要有雷达目标信息间的关联,近程跟踪雷达与“红外搜索与跟踪系统”、光电跟踪仪目标信息的关联,雷达与雷达侦察目标信息的关联。
3.2 功能模型的构建
编队目标信息融合的实质是多平台、多传感器、多目标信息融合,特点是多平台和多传感器间的协同和联合探测。因此,这里需要构建一个能体现舰艇编队目标信息融合特点的功能模型,如图4所示。图4所示的功能模型是在修订后的五层JDL功能模型[10~11]的基础上,突出多传感器间的状态关联、目标连续状态融合估计(状态融合估计)和目标离散状态融合估计(目标综合识别),淡化数据级的联合检测、单传感器目标信息处理过程(单传感器状态估计)、态势估计和威胁估计。由于融合功能主要产生在底层,因此在本节中重点对状态向量融合和关联估计原理作重点说明的同时,对量测级融合也作简要说明。
由于每个传感器具有独立的信息处理能力,因此在其检测数据进入融合以前,由预处理阶段完成局部多目标跟踪航迹和识别;然后把处理后的信息送至融合中心,融合中心根据传感器数据完成航迹关联、融合估计和目标综合识别,形成全局估计。
目标连续状态融合估计是对各传感器提供的航迹进行融合估计。这里在特征层进行航迹融合,因此为了消除各传感器时间、频率和坐标位置上的差异,需要对局部航迹进行配准,形成统一标准的量测;之后进行关联判断,判决哪些航迹属于同一目标,再选取适当的融合算法,形成全局一致的航迹信息。
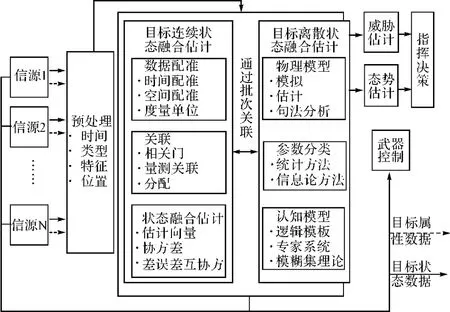
图4 编队目标信息融合功能模型
目标离散状态融合估计是对各传感器提供的目标属性信息进行融合估计。由于目标综合识别选择在决策层进行,因此不需要配准。在综合识别阶段可以选择事先建立的物理模型,依据统计方法或信息论方法进行认知模型的推理,达到目标综合识别的目的。
由于目标属性与目标航迹是密不可分,因此在图4中,通过批次将目标识别的结果与航迹关联起来。图中右侧部分是作战指挥信息系统对融合后的目标信息的综合应用,包括目标威胁估计、态势估计和武器控制等。
4 结语
本文的主要目的是为舰艇编队不同的作战任务和使用需求,提供具有针对性的目标信息融合功能模型,以满足舰艇编队对目标状态融合估计和目标综合识别的需求。
[1]沈春元,籍林峰.舰用作战指挥系统多传感器信息融合技术优化[J].雷达与对抗,2008,27(3):16-18.
[2]张留山.数据融合系统在编队电子战中的应用[J].舰船电子对抗,2005,28(6):16-19.
[3]董志荣.水面舰艇指控系统信息融合原理与算法[J].情报指挥控制系统与仿真技术,2001,22(11):29-43.
[4]李弼程,黄洁,高世海,等.信息融合技术及应用[M].北京:国防工业出版社,2010.
[5]潘冠华.舰艇综合指挥控制系统原理[M].西安:西北工业大学出版社,2010.
[6]牟之英,吴建民.多平台信息融合与智能化传感器管理技术综述[J].航空电子技术,2005,36(4):20-24.
[7]纪彦星,王西锋,陈庆元.目标综合识别系统中多传感器目标特征管理[J].雷达与对抗,2011,3l(2):5-7.
[8]任彦.多传感器信息融合技术研究[D].哈尔滨:哈尔滨工程大学,2004.
[9]姚跃亭,赵建军,尹波波.舰艇编队防空目标分配优化算法研究[J].计算机与数字工程,2011(1).
[10]David L Hall,Jamas Llinas.Handbook of Multi-sensor Data Fusion[M].Boca Raton,Fla:CRC Press,2001.
[11]Martin E.Liggins,David L.Hall,James Llinas.Handbook of Multi-sensor Data Fusion[M].2008.
猜你喜欢
新高考·高一数学(2022年3期)2022-04-28
中学生数理化(高中版.高考数学)(2021年1期)2021-03-19
青年歌声(2019年12期)2019-12-17
北京航空航天大学学报(2017年7期)2017-11-24
北京航空航天大学学报(2017年3期)2017-11-23
北京航空航天大学学报(2017年10期)2017-04-20
北京航空航天大学学报(2016年6期)2016-11-16
高中生学习·高三版(2016年9期)2016-05-14
新高考·高二数学(2015年11期)2015-12-23
舰船科学技术(2015年8期)2015-02-27