具有冗余特性的永磁容错电机短路故障分析与控制
2013-08-07 07:44朱景伟任宝珠邵萍波
电工技术学报 2013年3期
朱景伟 刁 亮 任宝珠 邵萍波
(大连海事大学轮机工程学院 大连 116026)
1 引言
在全电飞机、舰船等对安全性能要求高的应用领域中,电力推进和电力作动系统的故障可能导致重大的人身和财产损失。因此,在这些场合中应用的电机及其控制系统应该具有故障容错能力,即在发生故障后系统能够继续维持运行。由于容错电机及其控制系统的重要性,该课题的研究已经成为近年国内外的热点问题。
1996年,英国Newcastle大学的学者首次在无刷永磁电机中采用以相为单位的模块化拓扑结构,并且每相绕组采用独立的H桥功率变换电路,研制出六相永磁容错电机系统[1,2]。当永磁容错电机驱动系统发生定子绕组开路、短路故障,逆变器开关开路、短路故障后,整个系统的输出电磁转矩将减小。为此,美国Texas A & M大学的研究人员在1999年提出了平均增加无故障相的电流使无刷永磁容错直流电机输出平均额定转矩的控制方法[3]。2003年英国 Shfield大学的研究人员提出了永磁容错交流电机的最优转矩控制算法[4,5]。
国内对永磁容错电机及控制系统的研究起步较晚,江苏大学等单位设计了四相六极永磁容错电机,并对设计的电机进行了性能测试及控制[6,7]。南京航空航天大学对电力作动器中使用的六相十极电机进行了研究,并提出容错控制策略[8-10]。空军工程大学对六相永磁容错电机进行了研究,建立了电机单相开路故障下的解耦控制算法[11]。
虽然和普通无刷永磁同步电机比较,单一的永磁容错电机系统的可靠性得到了很大提高,但是如果电机控制器本身发生故障或供电电源发生故障,单容错电机拖动系统将完全失去驱动能力。为此,澳大利亚 Adelaide大学在 2002年提出了带冗余特性的永磁容错电机系统的拓扑结构[12],文献[13]对该电机驱动系统的开路故障控制策略进行了研究。
电机绕组短路故障和逆变器开关短路故障是最严重的故障类型,会严重影响电机及其控制系统的输出特性。由于目前对永磁容错电机及其控制系统中的短路故障研究有限,本文将对带冗余特性的永磁容错电机中的短路故障进行分析,并提出故障控制策略补偿故障引起的阻碍转矩;最后用仿真和实验结果对提出的故障控制策略进行验证。
2 电机结构及转矩数学模型
带冗余特性永磁容错电机的基本结构如图1所示。两台完全相同的三相永磁容错电机连接在同一轴上,分别定义为1号和2号电机,电机轴上安装测量转子位置的编码器。为了提高可靠性,每台电机都采用单独的电机控制器和供电电源。
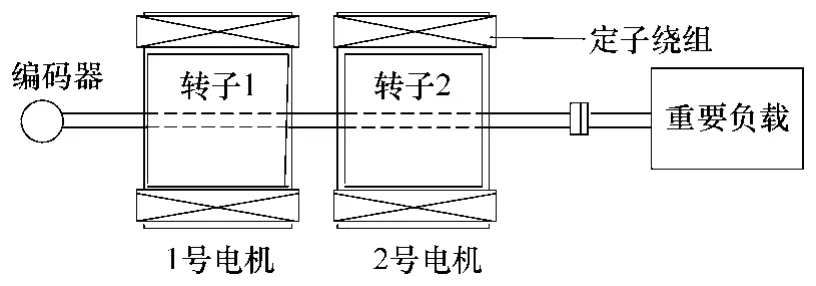
图1 带冗余特性永磁容错电机系统结构Fig.1 Structure of a FTPM motor drive with redundancy
本文使用的十二槽四极三相永磁容错电机内部结构如图2a所示。该电机采用独立绕组结构,每一相由串联在一起的两个独立绕组组成,而且每相采用图2b所示的单相全桥驱动电路。该永磁容错电机除了具有一般永磁电机体积小、功率密度高等特点,还具有磁隔离,电气隔离和热隔离等特点。当电机中发生一相绕组故障时,不会将故障传播到其它相,因此其他无故障相可以继续正常工作。

图2 容错电机绕组结构及单相驱动电路Fig.2 Motor structure and inverter circuit
两台三相永磁容错电机共有六相,为了简单起见,分别用1、2、3相和4、5、6相来描述两个电机的相数。在电机试验平台搭建时,保证相1和相4同相位,同理相2和相5、相3和相6也是同相位的。电机的主要参数为:绕组电阻:0.55Ω,绕组电感 2.1mH,反电动势系数0.33V/rad/s。
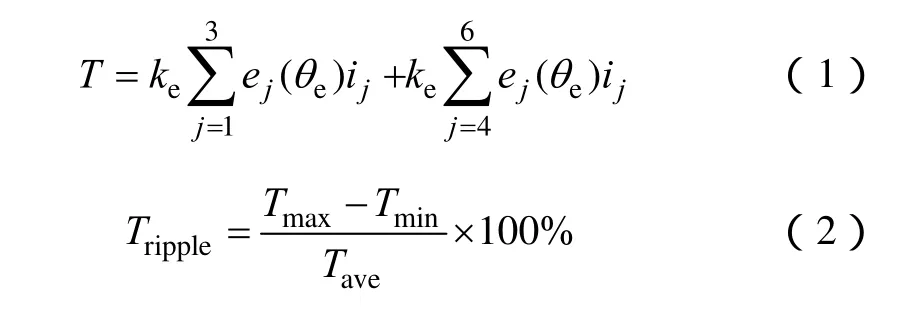
由于实验电机的反电动势波形接近正弦波,因此在无故障的情况下,电机每相电流的波形也是正弦波。因此图1所示的电机系统的输出电磁转矩和转矩脉动系数可由下式计算
式中 ke——电机定子绕组的反电动势系数;
ej(θe)——第j相的单位反电动势电压;
ij—— 第 j相的相电流;
θe—— 转子位置(电角度);
Tmax, Tmin和 Tave——系统输出的瞬时最大、最小和平均电磁转矩。
式(1)表明,电机输出的电磁转矩与单位反电动势电压和励磁电流的乘积成正比,并且当每相的反电动势电压和相电流波形同相位时,每相可以输出最大的电磁转矩。
整个电机系统的电气故障包括绕组开路和短路故障、逆变器开关的开路和短路故障(包括续流二极管短路故障)、电机控制器故障、转子位置传感器、电压和电流传感器故障等。其中电机绕组短路故障和逆变器开关短路故障是最严重的故障类型。因此,本文将着重分析这两种故障对电机及其控制系统输出特性的影响。
3 短路故障分析
3.1 绕组短路故障分析
电机绕组短路故障的等效电路如图3a所示,图中e(t) 为电机的反电动势,R、L为绕组的等效电阻和电感。当 e(t) 为正弦波时,短路绕组内产生的短路电流也是正弦波,其有效值表达式为

式中 ωm——电机的机械角速度;
np——电机的极对数。

图3 短路电流故障等效电路Fig.3 Equivalent circuits of short-circuit faults
该短路电流将产生与电机运行方向相反的阻碍转矩,平均阻碍转矩的表达式为

从式(3)、式(4)可以看出,短路电流和阻碍电磁转矩都是电机转子机械角速度的函数。如果不采取切实可行的措施,阻碍转矩的存在将导致整个电机驱动系统转速的降低和转矩脉动系数的增加。
假设电压和电流的基值等于额定转速下电机绕组的反电动势电压和绕组的短路电流,则电机的短路电流和阻碍转矩标幺值的表达式分别为

式中 Rpu,Lpu——短路绕组电阻和电感的标幺值;
ωpu——电机角速度的标幺值。
图4为电机绕组短路故障产生的阻碍转矩与电机转速之间的关系曲线,由图可以看出,在相同电机转速下,绕组的电感标幺值越大,阻碍转矩标幺值越小;当绕组具有单位电感时,阻碍转矩标幺值的峰值与绕组电阻的标幺值无关。但峰值以后,绕组电阻标幺值越小,阻碍转矩标幺值也越小。
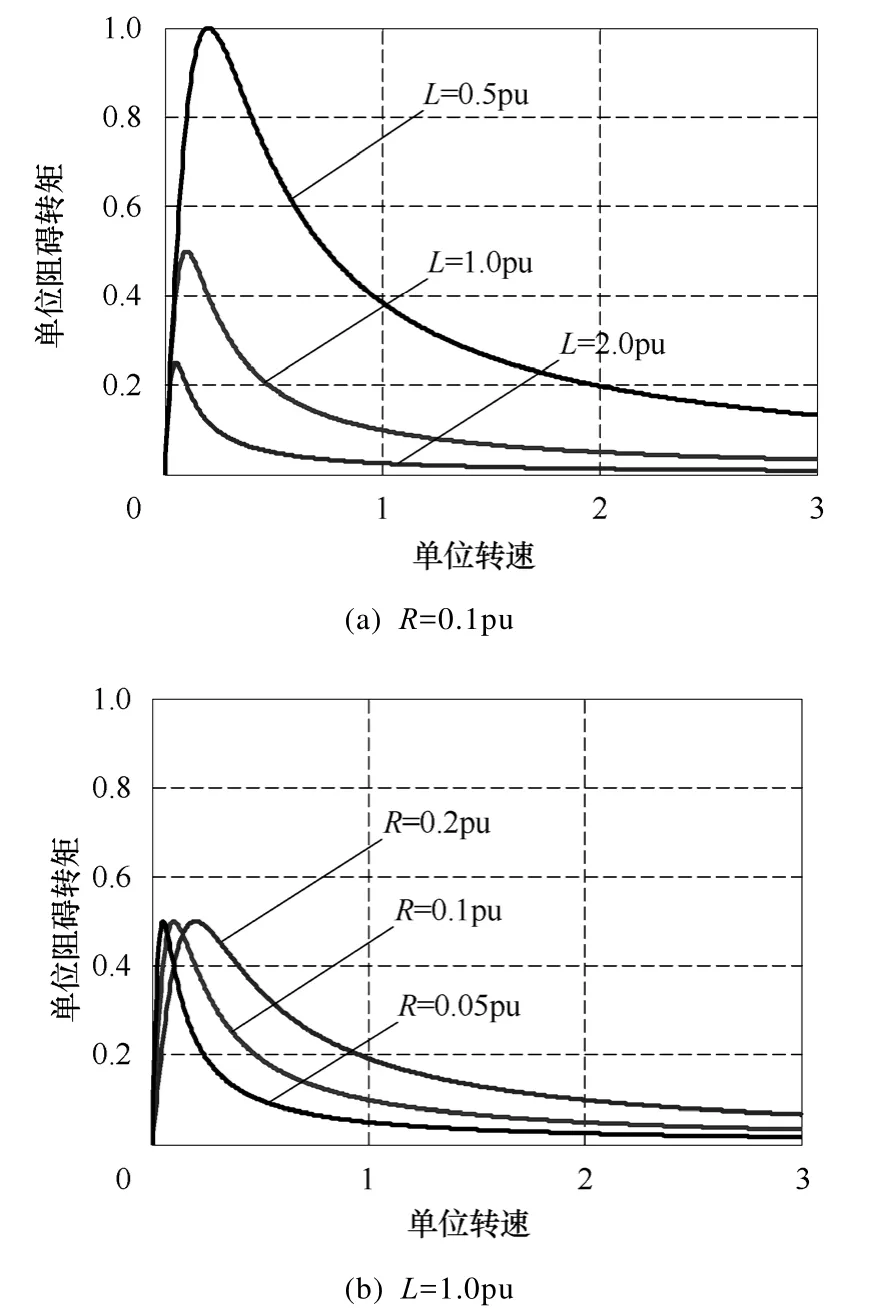
图4 不同电感和电阻条件下阻碍转矩与转速的关系Fig.4 Curves of drag torque with speed in different inductance and resistance values
3.2 开关短路故障分析
如果全桥逆变电路的一个开关或一个续流二极管短路,绕组就会通过本相另一个桥臂的二极管形成短路故障,其等效电路如图3b所示。由于二极管的存在,短路电流波形将是单方向的。图5所示为绕组短路故障和开关短路故障发生后,短路电流和平均阻碍转矩随转速变化的关系曲线,由图可知,当转速较高时(如图中大于250r/min),开关短路故障产生的短路电流和平均阻碍转矩数值大于绕组短路故障产生的短路电流和平均阻碍转矩数值。即开关短路故障对电机驱动系统造成的负面影响比绕组短路故障的严重。
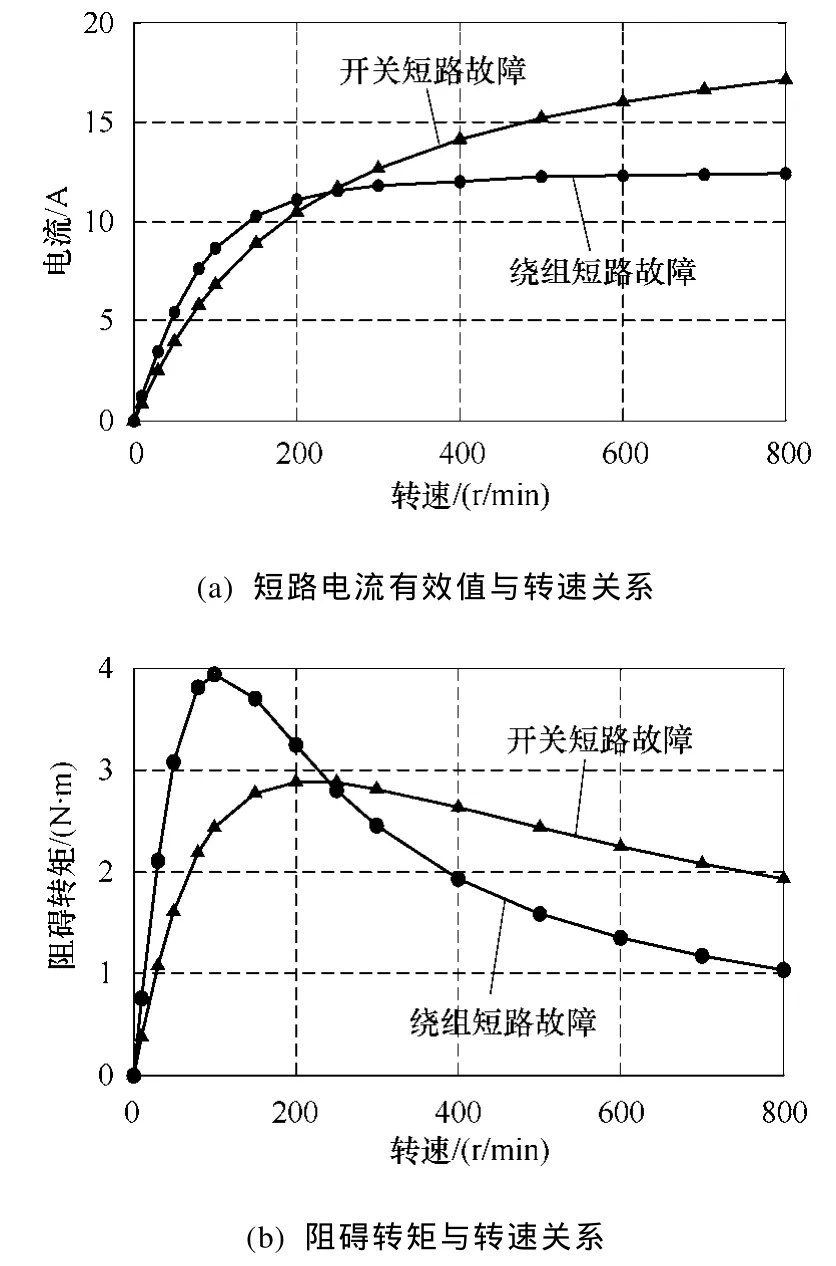
图5 阻碍转矩与转速的关系Fig.5 Relationship between short-circuit current and drag torque with speed in different short-circuit faults
为了减小开关短路故障对系统产生的负面影响,同时考虑到控制的方便性,在本文中假定逆变器的一个开关发生短路故障时,使本相对应桥臂的开关接通。如图 2b所示,当 VT1或 VD1发生短路故障时,将开关VT3接通。此时该相的等效电路与图3a相同,这样就将开关短路故障转化为绕组短路故障。
图6为电机在2000ms时发生一相短路故障前后的转矩仿真波形。从图中可以看出短路故障发生后,整个电机系统输出的平均电磁转矩从正常值的16.96Nm减小到14.02Nm,转矩脉动系数也从10.5%增加到80%。因此,当故障发生后,采取故障控制策略是完全必要的。

图6 电机发生一相短路故障前后转矩波形图Fig.6 Torque waveform when short-circuit fault occurs
4 短路故障控制策略及仿真
4.1 故障控制策略
采用故障控制策略的目的是补偿由于短路故障引起的转矩损耗,并减小由此引起的转矩脉动。另外在满足上述要求的情况下尽量减小电机内部的铜损。由于输出转矩与相电流成正比,因此控制电磁转矩的方法就是改变无故障相的电流波形。
如果第k相发生了短路故障,则该相短路电流ik(θe) 产生的阻碍转矩为

式中 ek(θe) ——第k相的单位反电动势,其最大振幅为±1。
云阳县有中职学校3所,其中国家示范中职学校1所(云阳职教中心)、市级合格中职学校1所(云阳师范学校)、民办中职学校1所(五一技校云阳分校)。3所学校发展各有侧重,各有特色,形成了错位发展、优势互补的良好发展格局。全县共有中职学生7970人,占高中阶段学生总数的24.6%;中职专任教师438人(其中双师型教师270人),生师比为18.2∶1。
分析表明,无故障相的最佳相电流表达式为

式中 下角标j——电动机的相数,j = 1,2, …, 6;
T0——无故障运行时系统输出的电磁转矩;
ej(θe) ——第j相的单位反电动势。
本文采用电流滞环跟踪控制技术,在无故障时电机的相电流为正弦波,并可表示为

式中 φj——第j相与第1相的相位差。
当第4相发生短路故障时,该相的短路电流i4(t)及电流与反电动势之间的相位差分别为

当采用短路故障控制策略后,无故障相的参考电流表达式为
4.2 仿真验证
根据以上提出的短路故障控制策略,建立了Matlab电机仿真模型。图7所示为电机的第4相在2000ms发生绕组短路故障后并采取故障控制策略的各相电流和电磁转矩仿真波形图。仿真结果表明,采取故障控制策略后,电机的平均输出电磁转矩为17.01Nm,转矩脉动系数为10.54%。可见,短路故障发生前后,整个电机输出的平均电磁转矩和转矩脉动系数与无故障时的数值相比无明显变化,因此,本文提出的短路故障控制策略是可行的。

图7 第4相发生短路故障并有故障控制策略的仿真波形Fig.7 Simulation waveforms when short-circuit fault occurs in phase 4 and fault control strategy is applied
5 实验验证
为了验证分析和仿真结果,本文搭建了如图 8所示的电机控制系统实验装置。该实验装置由两台三相四极永磁容错电机,两块参数检测电路板、六个单相全桥逆变器、一个编码器和两个基于dsPIC30F4011电机控制器的控制板等部分组成。另外,永磁容错电机轴上安装一台直流发电机作为负载。通过调节连接在直流发动机上的变阻器,可以改变系统负载的大小。
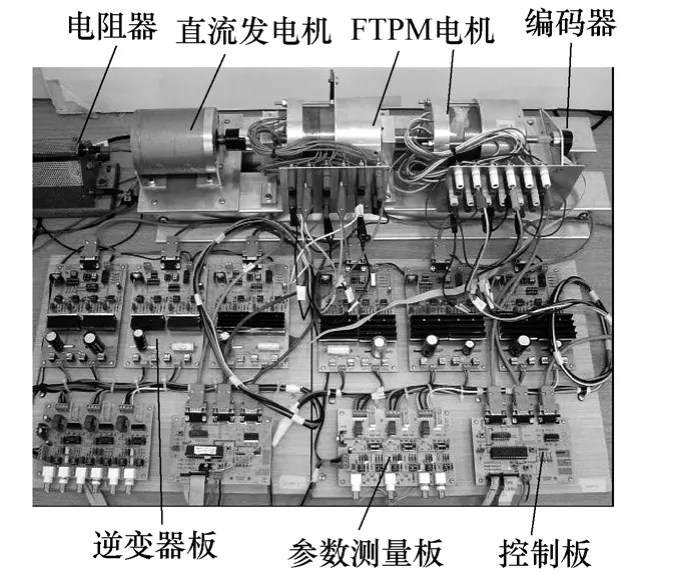
图8 带冗余特性的容错电机系统实验装置图Fig.8 Experimental setup of FTPM motor drive with redundancy
在系统实验时,用Labview数据采集卡(PXI-4472)对两个电机的相电流、负载电流和电压进行数据采集用于离线数据处理。由于没有高带宽的实时转矩传感器,本文中的电磁转矩波形是根据测得的相电流和已知的反电动势电压波形计算获得的,其中反电动势电压波形是一个与转子位置和电动机角速度有关的函数。
实验时通过将第4相连接端子短路的方法模拟电机绕组的短路故障。图9所示为一相短路故障运行且没有采取故障控制策略时的实验结果。
从图 9可以看出,2号容错电机的电磁转矩波形是一个周期信号,而且在一段时间内为负值。这表明第4相的短路电流在这期间产生了一个阻碍转矩,从而导致总的平均输出转矩从无故障时的 9.01Nm减少到 5.38Nm;转矩脉动系数由无故障时的 19%增大到 172%。电机的转速从无故障运行时的87r/min下降到了32r/min。


图9 第4相发生短路故障且无故障控制策略的实测波形Fig.9 Measured waveforms when short-circuit fault occurs in phase 4 and no fault control strategy is adopted
图10所示为第4相发生短路故障并采用了故障控制策略之后的实验结果。从图中可以计算出系统输出的总电磁转矩被提高到了8.82Nm,此数值非常接近无故障运行时的平均转矩值9.01Nm;转矩脉动系数也减小到38%。可见,本文提出的短路故障控制策略是切实可行的。

图10 第4相短路故障并采取故障控制策略实测波形Fig.10 Measured waveforms when short-circuit fault occurs in phase 4 and fault control strategy is adopted
6 结论
为了提高永磁容错电机的可靠性,本文提出了带冗余特性的无刷永磁容错电机的拓扑结构,并介绍了该电机驱动系统的特点及转矩数学模型。短路故障是永磁容错电机驱动系统中最严重的故障,本文重点研究了绕组短路故障和逆变器开关短路故障的等效电路,短路电流和阻碍转矩数学模型及这两种故障对整个系统输出电磁转矩及转矩脉动系数的影响程度。研究结果表明,逆变器开关短路故障比绕组短路故障对系统输出特性的影响更为严重,因此提出将逆变器开关短路故障转化为绕组短路故障的处理方法。针对短路故障降低系统输出电磁转矩及增大转矩脉动系数的问题,提出了最佳电流故障控制策略,并给出了参考电流计算的数学模型。仿真和实验结果证明了所提出的故障控制策略的正确性和可行性。
[1]Mecrow B C, Jack A G, Haylock J A.Fault-tolerant permanent magnet machine drives[C].IEE Proc.on Electric Power Applications, 1996, 143(6): 437-44 2.
[2]Mecrow B C, Jack A G, Atkinson D J, et al.Design and testing of a four-phase fault-tolerant permanentmagnet machine for an engine fuel pump[J].IEEE Transactions on Energe Conversion,2004, 19(4):671-678.
[3]Gopalarathnam T, Toliyat H A, Moreira J C.Multi-phase fault-tolerant brushless DC motor drives[C].Proc.of the 35th IEEE IAS Annual Meeting,2000: 1683-1688.
[4]Wang J, Atallah K, Howe D.Optimal torque control of fault-tolerant permanent magnet brushless machines[J].IEEE Transactions on Magnetics,2003,39(5): 2962-2964.
[5]Wang J, Atallah K, Zhu Z Q, et al.Modular three-phase permanent-magnet brushless machines for in-wheel applications[J].IEEE Transactions on Vehieve Technologies,2008, 57(5): 2714-2720.
[6]吉敬华, 孙玉坤, 朱纪洪, 等.模块化永磁电机的设计分析与实验[J].电工技术学报,2010,25(2):23-29.Ji Jinghua, Sun Yukun, Zhu Jihong, et al.Design,analysis and experimental validation of a modular permanent-magnet machine[J].Transaction of China Electrotechnical Society,2010,25(2): 23-29.
[7]任元, 孙玉坤, 朱纪洪.四相永磁容错电机的SVPWM控制[J].航空学报,2009, 30(8): 1490-1496.Ren Yuan, Sun Yukun, Zhu Jihong.SVPWM control of four-phase fault-tolerant permanent magnet motor for aircraft[J].Acta Aeronoutica Et Astronautica Sinica,2009, 30(8): 1490-1496.
[8]余文涛, 胡育文, 郝振洋, 等.永磁容错电机最优转矩控制策略实验[J].航空学报,2010, 31(8):1622-1628.Yu Wentao, Hu Yuwen, Hao Zhengyang, et al.Experimental study on optimal torque control of fault tolerant permanent magnet motor[J].Acta Aeronautical Et Astronautica Sinica,2010, 31(8): 1622-1628.
[9]郝振洋, 胡育文, 黄文新, 等.永磁容错电机最优电流直接控制策略[J].中国电机工程学报,2011,31(6): 46-51.Hao Zhenyang,Hu Yuwen,Huang Wenxin, et al.Optimal current direct control strategy for fault tolerant permanent magnet motor[J].Proceedings of the CSEE,2011, 31(6): 46-51.
[10]郝振洋, 胡育文, 黄文新, 等.转子磁钢离心式六相十极永磁容错电机及控制策略[J].中国电机工程学报,2010, 30(30): 81-86.Hao Zhenyang,Hu Yuwen,Huang Wenxin, et al.Six-phase ten-pole fault tolerant permanent magnet machine and its control strategy[J].Proceedings of the CSEE,2010,30(30):81-86.
[11]彭芳彪, 严东超, 王光明, 等.六相永磁容错电机不对称运行研究[J].空军工程大学学报,2009,10(3): 73-77.Peng Fangbiao, Yan Dongchao, Wang Guangming, et al.Research on asymmetrically operation of six-phase permanent magnet fault tolerant motor[J].Journal of Air Force Engineering University,2009, 10(3): 73-77.
[12]Ertugrul N, Soong W, Dostal G, et al.Fault tolerant motor drive system with redundancy for critical application[C]. IEEE 33rd Power Electronics Specialists Conference,2002: 1457-146 2.
[13]张晓晨, 朱景伟.双余度永磁容错电机开路故障补救策略研究[J].微电机,2011, 44(9): 5-8.Zhang Xiaochen, Zhu Jingwei.Study of open circuit fault remedial strategy of a dual fault tolerant permanent magnet motor with redundancy[J].Micromotors,2011, 44(9): 5-8.
猜你喜欢
微电机(2022年8期)2022-10-12
微特电机(2021年11期)2021-11-16
上海大中型电机(2021年2期)2021-07-21
防爆电机(2020年6期)2020-12-14
郑州大学学报(工学版)(2020年2期)2020-06-16
汽车电器(2019年2期)2019-03-22
电子制作(2017年1期)2017-05-17
照明工程学报(2016年3期)2016-06-01
电测与仪表(2016年2期)2016-04-12
云南电力技术(2015年2期)2015-08-23