
智能型汽车安全气囊点火控制算法
2013-08-01 11:23吴亮亮
重庆理工大学学报(自然科学) 2013年8期
吴亮亮,凌 旭
(重庆理工大学机械工程学院,重庆 400054)
安全气囊系统又称辅助乘员保护系统,其作用是当汽车发生碰撞后在极短时间范围内给气袋迅速充满气,从而在乘员和汽车内部各构件之间形成一道缓冲吸能屏障。因此,利用安全气囊系统可以尽可能地削弱乘员因碰撞所遭受的冲击力,起到保护乘员的作用。
安全气囊在被动安全方面发挥着重要作用,但随着安全气囊的普及,可能对乘员造成伤害的负面效应也逐渐显露出来。存在的主要问题包括安全气囊的延迟点火、漏点火和误点火等现象时有发生,对乘员造成严重的伤亡和财产损失。为了使安全气囊正确点火,研究安全气囊的点火控制非常必要。
1 安全气囊点火原理
当汽车发生碰撞时,安全气囊点火控制系统利用车身上的压力传感器的信号(主要是减速度)迅速判断出碰撞时的车速、碰撞强度等相关信息,然后再根据收到的信息与预先设定的阈值相比较,从而决定是否点爆安全气囊以及何时点爆安全气囊。
安全气囊最佳点火时刻是在发生时刻到安全气囊完全展开时乘员的头部正面与气囊相接触时刻的前30 ms。目前,国际上一般利用“127mm-30ms”准则来确定安全气囊的最佳点火时刻。其含义为:当汽车刚开始发生碰撞时,乘员相对于车体向前移动127 mm的时刻的前30 ms时间点就称为安全气囊的最佳点火时刻。一般情况下,轿车乘员与转向盘之间的间距大约为305 mm,气囊充完气后的厚度约178 mm,气囊从点爆到充满气体所用时间为30 ms。由此可知:安全气囊的最佳点爆时刻为乘员前移127 mm这一时刻的前30 ms。
安全气囊点火控制算法研究主要分为2个方面:一方面根据点火条件给出点火判断;另一方面是根据给定的最佳点火时刻,利用BP人工神经网络和模糊控制相结合,通过多次试验提高安全气囊的点火精度,改善安全气囊的安全性能。
2 控制算法
2.1 模糊控制
“模糊”与“精确”是相对的概念。模糊性普遍存在于人类的语言交流和思维中,是一种不确定性的表现。随机性则是客观存在的不确定性的另一种类型的表现形式。两者虽都具有不确定性,但有着本质的区别:模糊性主要指的是人对于概念外延的主观理解上的不确定性;随机性则主要反应了客观上的自然的不确定性,即对事件发生与否的不确定性。
模糊控制有2个非常突出的优点:第一,相对于其他类型的控制,模糊控制可比较全面地利用人类的语言信息,使人的控制策略的实现非常便捷;第二,在缺少被控对象数学模型的情况下,模糊控制可以实现较好的控制,这是因为模糊控制器输入、输出模糊集和模糊规则中已隐含被控对象的动态特性。
模糊逻辑系统指的是那些与模糊概念和模糊逻辑具有直接关系的系统,通常由模糊化、模糊规则库、模糊推理机和去模糊化4部分组成[1]。图1为模糊逻辑系统的基本结构。
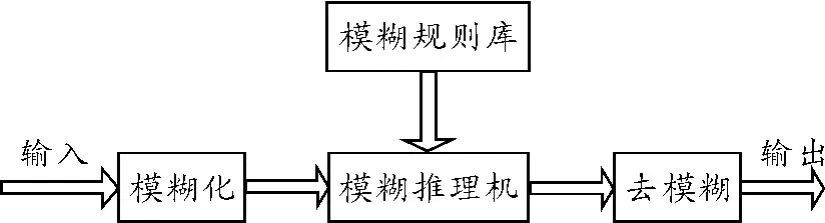
图1 模糊逻辑系统的基本结构
2.2 BP 神经网络
BP神经网络是一种单向传播的多层前馈网络,其结构如图2所示。网络除具有输入、输出节点以外,还含有单层或者多层的隐层节点,其同层节点之间没有任何耦合关系。它是利用期望值与输出值之间的误差,从输出层向输入层的方向进行计算,是反向递推计算的,所以通常称该算法为误差反向传播算法,其网络学习过程是一种误差边向后传播边修正权系数的过程[2]。
人工神经网络主要是用来模拟人类大脑的组织机构和运行机制,它的一个重要特点是神经网络在进行训练前必须确定其结构。在神经网络参数修改的过程中,对于已经确定的神经网络其结构将不再发生变化。在人工神经网络的应用中,对于给定的任务,其输入层神经元和输出层神经元个数是已知的。如果隐含层神经元个数可以被求出,那么神经网络的结构就可以被完全确定下来。

图2 BP神经网络结构
以仅含有1层隐层结构的BP神经网络为例,假定其3层网络结构分别为:输入层i个神经元,隐层n个神经元,输出层c个神经元,网络的权值为W。
若输入训练样本为X=(x1,…,xi)T,则期望输出为τ=(t1,…,tc)T,网络实际输出为 z=(z1,…,zc)T,隐含层输出为 y=(y1,…,yn)T,Y 为神经元的净输出。对于隐含层有:yj=f(Yj),Yj=wjmxm,i=1,…,n;对于输出层有:zk=f(Yk),Yk=,i=1,…,c。
误差平方和准则函数为

权值调整公式为

其中:η为学习速率;x0、y0是为引入阈值而设置的偏置量[3-4]。
BP算法通过有教师的方式进行学习,由教师对每一种输入模式设定一个期望值,然后对网络输入实际的学习模式,并由输入层经隐层向输出层传播。实际输出与期望输出的差即为误差,其依据使平方差最小的学习规则,由输出层向隐层修正链接权值,该过程称为“误差逆向传播”[5]。BP算法是应用于感知器神经网络的最广泛的算法,主要由信息正向传播和误差反向传播两个过程组成。BP算法流程如图3所示。初始化就是对W设初始值,一般取零左右的极小随机数。

图3 BP算法流程
3 算法模型
算法采用两级结构,结合BP神经网络与模糊控制同时进行点火预测。其优势在于既发挥了BP神经网络的非线性映射特性,又发挥了模糊控制策略实现的便捷性[6]。图4为算法结构。

图4 算法结构
本算法的任务是根据加速度采样数据预测头部位移,判断是否需要点火,满足点火条件时按照“127mm-30ms”准则确定最佳点火时刻。当模糊控制判定满足点火条件时,由BP神经网络预测当前时刻后30 ms时刻的头部位移。如果达到127 mm位移,则安全气囊点火;否则,继续预测位移量,直到预测位移量达到127 mm,使安全气囊点火。算法结构中上部分为模糊神经网络层,1层为特征提取层,2、3层为策略判定层,4层为决策层;下部分为BP神经网络层。本研究的BP网络采用两层隐层结构,第1、2层均采用10个节点,传递函数采用双曲正切Sigmoid型函数,输入层节点为5个,输出层节点为1个。每次输入的数据是当前时刻算之前最近10 ms的加速度值,采样周期为2 ms,即每次输入是1个由5个数据组成的向量。
4 算法验证
图5为某车型实际台车试验时得到的2条不同初速度下的加速度曲线样本,分别为32 km/h和56 km/h的100%重叠正碰时的加速度曲线。图6为与之对应的该碰撞初速度下假人的头部位移曲线。
运用Matlab的神经网络工具箱mntool及模糊逻辑工具箱fuzzy建立对应的网络控制层,利用加速度数据以及位移数据分别对这2个网络进行训练。训练好算法模型后,再输入加速度样本数据即可以得到头部位移的预测曲线。将预测的头部位移曲线与头部位移曲线的样本值进行比较,检验其预测点火时刻头部位移值与样本值的误差是否在确定的范围之内,从而检测其算法的有效性[7-8]。
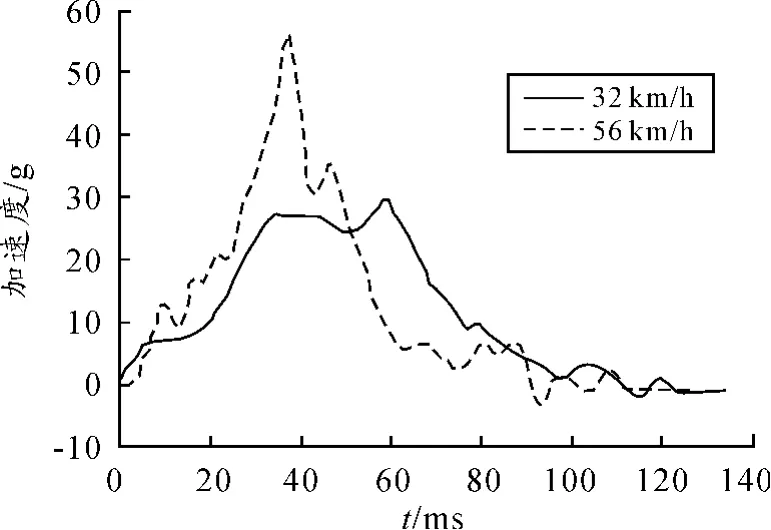
图5 100%重叠正碰加速度曲线
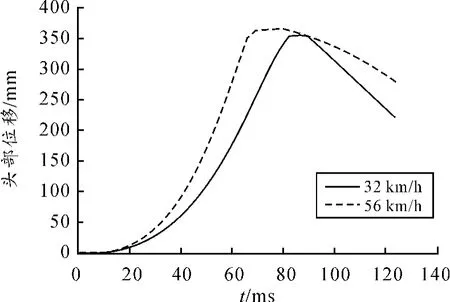
图6 100%重叠正碰假人头部位移曲线
图7和图8分别为32 km/h和56 km/h 100%重叠碰撞时,头部位移的网络输出值与样本值的局部放大图。
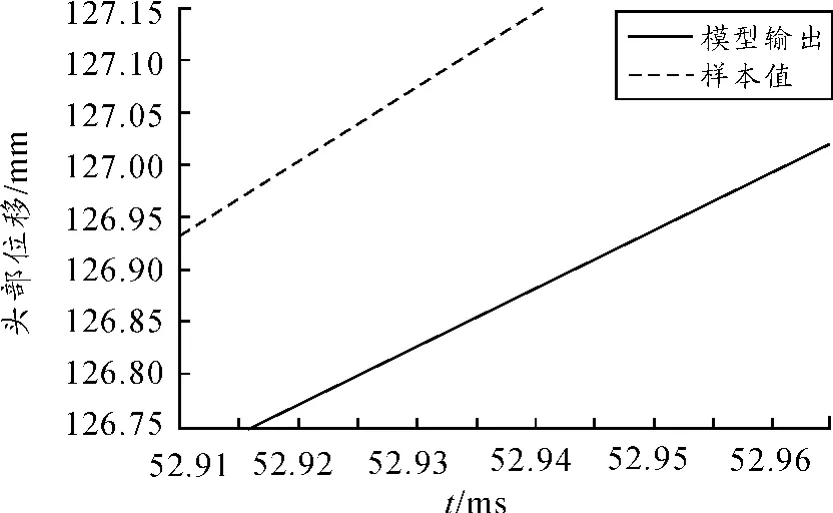
图7 32 km/h初速碰撞时头部位移的模型输出与样本值局部放大图
由样本位移曲线可知:实际头部位移127 mm时对应的时刻为52.92 ms。在图7中52.92 ms对应的模型位移为126.82 mm,误差为0.18 mm,在127±1 mm范围之内。由样本曲线可知:实际头部位移127 mm时对应的时刻为45.22 ms,在图8 中45.22 ms对应的模型位移为 126.81 mm,误差为0.19 mm,在127±1mm范围之内。

图8 56 km/h初速碰撞时头部位移的模型输出与样本值局部放大图
由图7和图8可以得出:网络预测的假人头部位移量与样本位移量有较好的拟合度。该网络能比较精确地预测到乘员的头部位移量,误差控制在允许的范围之内,用该算法确定安全气囊的点火时刻是可行的。
5 结束语
利用BP人工神经网络结合模糊控制建立安全气囊的点火控制模型,通过模型的输出来判定是否触发气囊,若满足触发条件,则预测什么时候触发气囊。与以往的安全气囊点火控制算法相比,该算法能比较准确地判定安全气囊的最佳点火时刻。仿真与试验结果表明:该算法是可行的,有利于提高汽车的安全性能。
[1]刘国荣.多变量系统模糊/神经网络自适应控制[M].北京:科学出版社,2012:8-15.
[2]乔俊飞,韩红桂.前馈神经网络分析与设计[M].北京:科学出版社,2013:10 -11,30-37.
[3]陈娜.基于人工神经网络的预报型汽车安全气囊点火控制算法的研究[D].长沙:湖南大学,2005:44-45.
[4]郭培源.高精度汽车安全气囊最佳点火时刻预测算法[J].软件,2012,33(10):89 -90.
[5]秦孟苏.基于模糊神经网络的汽车安全气囊智能点火控制算法[D].长沙:湖南大学,2008:36-38.
[6]武涛.汽车安全气囊控制系统及碰撞分析系统的设计[D].合肥:中国科学技术大学,2011:20 -24.
[7]周润景,张丽娜.基于MATLAB与fuzzy TECH的模糊与神经网络设计[M].北京:电子工业出版社,2010:122-136.
[8]李国勇.神经·模糊·预测控制及其MATLAB实现[M].北京:电子工业出版社,2013:201-214.
猜你喜欢
中国特种设备安全(2022年6期)2022-09-20
汽车电器(2018年1期)2018-06-05
制造技术与机床(2017年6期)2018-01-19
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
汽车文摘(2015年11期)2015-12-02
电源技术(2015年11期)2015-08-22
电源技术(2015年9期)2015-06-05
电测与仪表(2014年14期)2014-04-04
