
采用RM算法的WiNCS功率控制建模与仿真
2013-08-01 11:23郭兴众魏利胜孙少伟
重庆理工大学学报(自然科学) 2013年8期
阎 延,郭兴众,魏利胜,孙少伟
(安徽工程大学 安徽检测技术与自动化装置重点实验室,安徽芜湖 241000)
无线网络控制系统(wireless networked control system,WiNCS)融合了计算机通信、网络和控制技术,以无线网络作为信息传输媒介,特点是连接方便灵活,维护方便,机动性强,可在复杂环境下持续工作。目前,由于受到相关技术和资金的限制,针对WiNCS的仿真研究已经逐渐成为一个新的热点。在做仿真研究时,不仅要对控制算法加以考虑,还要考虑节点的功率控制对系统性能产生的影响。
TrueTime是一种基于Matlab的仿真工具箱,可与Simulink工具箱联合构建系统仿真模型,同时支持控制与实时调度,能对网络时延、参数对系统性能的影响、网络调度策略以及网络协议等多方面进行综合仿真研究。此外,还可通过模拟电池供电的无线网络节点进行无线网络相关算法的仿真验证[1]。在无线仿真环境下,TrueTime支持各种控制算法和节点功率调度策略对控制系统性能影响的仿真研究[2]。
1 TrueTime工具箱
TrueTime工具箱以Matlab/Simulink为操作平台,可简便快速地搭建分布式实时控制系统,建立系统动态过程、控制任务执行以及网络交互的联合仿真模型。
TrueTime工具箱提供了6个模块供用户调用。
1)内核模块(TrueTime Kernel)。TrueTime Kernel简单且使用灵活,可充当网络控制系统中如传感器、控制器和执行器等节点,内置A/D和D/A转换器、网络接口、调度端口以及外部中断通道,功能相当于一台控制计算机。用户可以用C++语言或Matlab语言编写代码函数和进行模块初始化[4]。在仿真过程中,可以在Schedule端口接示波器,使用户查看到系统资源的分配情况。
2)网络模块(TrueTime Network)。TrueTime Network被用作网络控制系统的通信网络,可以对如控制协议、节点数目、传输速率、数据丢失率等多种参数进行设定。本文仅涉及WiNCS节点通信,故不详述TrueTime Network的相关应用。
3)无线网络模块(TrueTime Wireless Network)。TrueTime Wireless Network通过从节点发射无线数据信号来完成信息传递,支持IEEE 802.11 b/g(WLAN)和 IEEE 802.15.4(ZigBee)两种网络类型。在此模块环境下,用户可以根据需要对模块数、节点数目、网络速度、发射功率等参数进行设置。本文所构建的无线网络模型主要基于该模块。
4)电源模块(TrueTime Battery)。TrueTime Battery是供能模块,可为内核模块提供电源。
5)发送消息模块(ttSendMsg)和接受消息模块(ttGetMsg)。这是2个独立的模块,可以创建一个不需要M文件的仿真模型。
2 功率控制策略及算法实现
功率控制策略控制任务同时在网络控制系统中的传感器、执行器和控制器节点中执行,它们之间通过无线网络进行连接,构成一个闭环反馈系统(图1)。
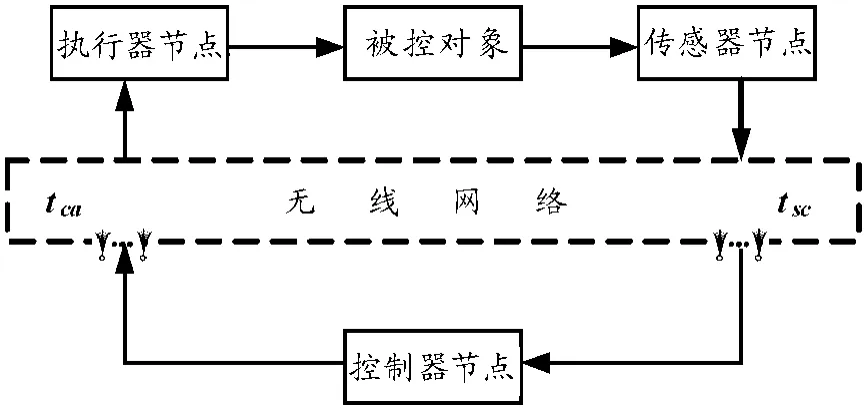
图1 无线网络控制系统的结构
功率控制策略对网络信息的传输质量具有很大影响,进而影响控制系统的稳定性[3]。系统控制性能可以通过探求高效的功率控制策略加以提高,这也是无线网络控制系统TrueTime仿真必须解决的关键问题。在这方面,中外多位学者也进行了一些开创性的研究:文献[4]通过功率控制降低了节点的能耗,提高了网络生存时间和系统能效;文献[5]提出了一种M-D策略,通过代码实现节点的功率控制,降低了控制的复杂度;文献[6]提出自适应机制节点功率控制策略,能有效减少功率消耗,但成本偏高;文献[7]以动态博弈思想来优化功率传输,减少传递过程的损耗,但信息交互量大,不适用于大型无线网络控制系统。
这些针对各种策略的改进研究对于功率的控制起到了一定的作用,但对于节点收发信息是否成功均未加以考虑。另外,节点所执行的任务往往不是单一的,任务之间存在能源上的竞争。这些问题会产生节点能量的浪费,使后续任务因得不到充足的能源而无法执行,会对系统控制性能产生不利影响。
单调速率(rate monotonic,RM)是TrueTime网络模块预定义的一种调度策略。它是一种基于优先级的静态分配算法,以任务周期的长短决定优先级的高低,周期越短优先级越高。优先级不随时间变化,调度总是试图最先运行周期最短的任务[8]。引入RM算法的思想的控制策略:系统通过节点之间周期性地发送ping消息来确定是否完成通信。设置一个时间,以此为标准时间(BT)。若信息返回时间(RT)与BT相比越小,则优先级越高,下一个周期内节点功率损耗也就越低。与此同时,损耗计算值越小,节点使用时间越长。如果RT与BT相比越大,则功率损耗越多。因此,把损耗计算值设定为负,即进行功率补偿,直到功率增加到饱和或等于设定值。将这种策略定义为功率单调策略(power monotonic strategy,PMS),将它运用到控制系统仿真模型中,并与M-D策略进行控制性能的比较。
PMS策略归纳:① 编写代码,对各节点进行初始化。在代码中设置节点初始功率、标准时间BT参数等。②建立节点信息缓存区,存储返回信息。③读取返回信息,比较RT和BT的大小。若RT<BT,在下一周期内,减少当前节点传输功率(PW);若节点剩余功率(即当前总功率P大于当前PW的值),说明系统仍有能力继续传输信息,则进入下一周期,继续判断RT和BT大小;若该节点剩功率不足以发送数据,则认为任务完成;若RT>BT,在下一周期内,首先对PW给予一定的补偿值。补偿后,再次比较当前节点的P是否等于PW。若二值相等,则返回初始化阶段,重新给各节点分配功率任务;若不等,且在接下来的N个周期内RT仍然一直大于BT,则增大PW一直到节点功率饱和,再返回初始化阶段,对功率任务进行再次分配;若在这期间出现RT<BT的情况,则返回并进入下一周期继续运行。
3 仿真系统的建立及分析
本文在 Matlab/Simulink环境下,利用 TrueTime工具箱,以传感器、执行器和控制器系统为节点,直流电机为被控对象,通过无线网络进行连接,建立仿真模型。直流电机传递函数为

控制器采用BP神经网络PID控制算法。神经元分布:输入层4个,隐含层5个,输出层3个。各层加权系数初值分别为w(2)ji(0)、w(3)ji(0),学习速率和惯性系数分别为0.25和0.05。输出层节点分别对应 kp、ki、kd,活化函数为 Sigmoid 函数:
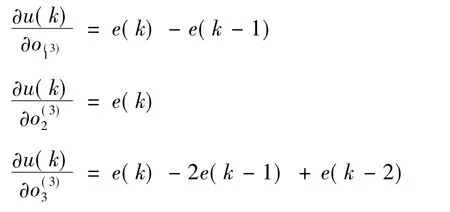
对于增量式数字PID控制算法,则有:
本文模型(见图2)中采用2个内核模块分别作为传感器/执行器模块和控制器节点,依次命名为Node1和Node2。Node1为时间驱动方式,对运动过程进行周期性采样,并通过无线网络将采样值发送给Node2。Node2采用事件驱动方式,同样通过无线网络将控制结果传输给Node1。Node1通过ttGetMsg获取Node2发送的数据信息并存放在缓存区,然后比较响应时间RT和返回标准时间BT。若缓存中有响应,可以确定Node2与Node1之间已完成通讯。Node2的功率在每次数据发送后会减少固定的值。若没有响应,则增加Node2的数据传输功率,同样也是每发送一次递加一个固定值。当需要的功率超过Node2电池的最高负荷时仍然没有响应,则说明信息传输失败,需返回初始化阶段,重置Node2与Node1之间的传输功率及其他通讯参数。
4 仿真结果分析
仿真模型采用方波作为系统参考输入,PID控制器参数设定为:采样周期 Ts=0.01,微分增益kd=0.035,比例增益 kp=1.5,积分增益 ki=100 000,各节点初始功率为20 mW。对各个节点进行初始化和编程之后运行仿真模型,结果如图3~5所示。

图2 WiNCS仿真模型

图3 方波参考输入
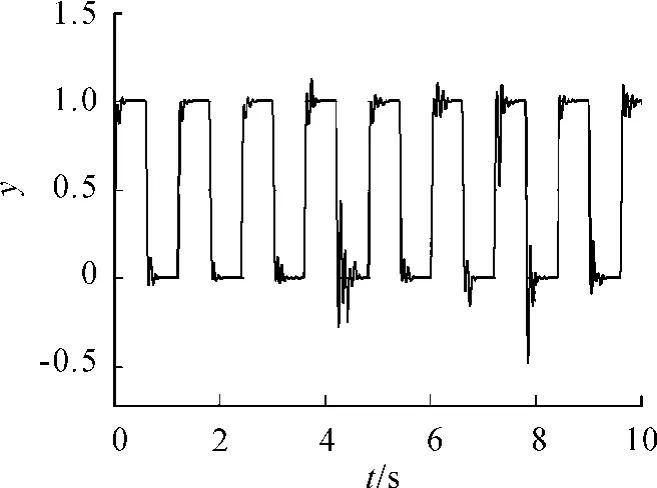
图4 M-D策略下的系统性能曲线
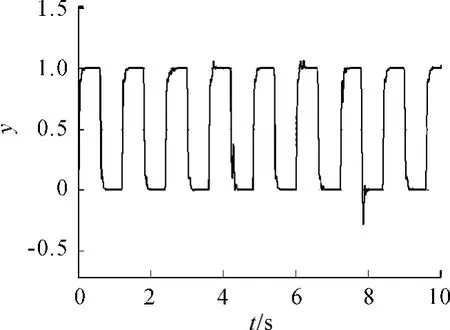
图5 PMS策略下的系统性能曲线
从运行结果可以看出:在M-D功率策略下(见图4),系统在开始一段时间内尚可保持稳定,后来由于能量的衰减和不确定数据产生的任务竞争造成功率损耗,剩余功率少于数据发送需要的功率而又得不到及时补偿和重新分配,系统稳定性出现波动,使得整体控制效果趋于一般;而在PMS策略下(见图5),系统按照既定优先级合理地分配功率,并执行任务,性能曲线更加接近于方波,且抖动较少,减少了节点功率损耗,提高了节点功率利用率,控制效果明显优于M-D策略。
在控制器节点中对初始化程序中的power_controller_task任务块进行屏蔽,使功率控制策略得以中断,重新仿真后得到如图6所示的曲线。可以看出:功率的消耗是连续的,节点中有限的能源被很快耗光,从而失去了控制能力[9]。这再次证明在无线网络控制系统中,功率控制是必不可少的。

图6 无功率控制的系统性能曲线
5 结束语
WiNCS以其突出的特点和广阔的应用前景,一经提出便受到了国内外学者的极大关注,已在工程领域有一定程度的应用,但其理论研究还远远落后于实际需求,因此对它的研究显得十分迫切。本文针对无线网络控制系统中的外部控制节点的通信功率的控制问题进行了仿真分析,提出了一种新的功率控制策略,并将其运用于系统模型中。实验结果表明:该控制策略可以显著提高系统的稳定性和功率利用率。
[1]王洁,何宁,陈超波.无线网络控制系统的建模与仿真研究[J].计算技术与自动化,2011,30(2):42 -45.
[2]程启明,郭瑞青,杜许峰.基于TrueTmie工具箱的网络控制系统及其在电机控制上的应用[J].上海电力学院学报,2009,25(1):23 - 28.
[3]沈永增,刘锋.无线网络节点功率控制仿真研究[J].计算机仿真,2010(3):115-119.
[4]赵贤林,逄滨,沈明霞.基于TrueTime的无线网络功率控制系统[J].计算机工程,2010,36(10):127 -129.
[5]Andersson M,Henriksson D,Cervin A.TrueTime 1.6 -Reference Manual[R].Department Of Automatic Control Lund University,Sweden,June 2008.
[6]ZHANG X,LIU M,GONG H.PCAR:a power controlled routing protocol for wireless ad hoc networks[C]//Proc of IEEE International Symposium on a World of Wireless Mobile and Multimedia Networks,Montreal.USA: [s.n.]:2010:1 -16.
[7]李沛,王晖,樊鹏翼.无线网络中自私功率控制行为研究[J].计算机工程,2011(15):60-63.
[8]赵海,宁宣杰,赵震宇.RM算法中减少抢占开销的任务微调算法[J].东北大学学报:自然科学版,2011,32(5):650-654.
[9]王炎.天线传感器网络坏点识别研究与应用[J].压电与声光,2013(3):452 -455.
猜你喜欢
铁道通信信号(2020年12期)2020-03-29
山东冶金(2019年3期)2019-07-10
发明与创新(2019年2期)2019-01-12
消费导刊(2018年10期)2018-08-20
中成药(2017年10期)2017-11-16
中国科技纵横(2016年10期)2016-12-01
信息安全研究(2016年4期)2016-12-01
通信电源技术(2016年1期)2016-04-16
电测与仪表(2016年20期)2016-04-11
移动通信(2015年17期)2015-08-24
