基于插值和加窗傅里叶变换的曲率模态提取算法
2013-08-01 11:37FUYu朱长春田光明
重庆理工大学学报(自然科学) 2013年9期
杨 翀,FU Yu,朱长春,田光明
(1.中国工程物理研究院总体工程研究所,四川绵阳 621900;2.Temasek Labs and School of MAE,Nanyang Technological University,50 Nanyang Drive,Singapore 637553,Singapore)
裂纹的出现和扩展会造成结构的性能下降甚至破坏,因此对早期裂纹的位置进行检测是工程实践中的一个重要课题。裂纹的出现会影响结构的物理特性,例如质量、阻尼和刚度等,进一步会导致结构振动参数发生改变。通过测量这些振动参数的改变可以对裂纹进行检测[1]。常见的基于振动测量的裂纹检测方法主要有频率法和模态法。频率法通过测量结构固有频率的改变来检测裂纹,其优点是测量方法简单和精度高,但其缺点也比较明显。裂纹导致的固有频率改变量较小,因此更容易受到其他因素(如环境温度、加载精度等)的影响,而且,固有频率的变化受到裂纹位置和开裂程度的共同作用,不同的裂纹位置和开裂程度可能产生相同的变化量,特别是在对称结构中,对称位置上的同等裂纹就能引起相同的变化量。这都给裂纹的定位带来困难。模态法则避免了这些问题。不过模态的测量比较复杂,需要一系列的传感器,而且通常传感器的分布不可能非常密集,这就导致测量的空间分辨率和精度较低。另一方面,模态法中更常见的是通过对曲率模态,即对位移模态2阶导数的比较来检测裂纹,因为其效果更好[2]。曲率模态通常采用中心差分法计算,在模态测量的分辨率和精度不高时往往得到的曲率模态误差很大,无法用于裂纹检测。针对这一问题,本文引入了插值和加窗傅里叶变换算法来计算曲率模态。采用自同步的多点多普勒测振仪对完整梁和裂纹梁进行实验,准确地探测到了裂纹所在位置。实验结果表明该算法具有很高的精度。
1 曲率模态提取算法
插值法是一种通过计算在采样点之间建立一些新的点,从而提高分辨率的数值方法。常见的插值算法有线性插值、多项式插值和样条插值等。线性插值方法简单,但精度低。样条插值精度较高,但须引入边界条件,而且由于测量点通常不会落在边界上,因此在模态的样条插值重建时边界的精度较低。多项式插值法在采样点数量较多时,边界会出现龙格现象而导致误差较大。龙格现象可以采用分段插值如分段Hermite插值等方法解决。本文采用分段三次Hermite插值方法。
加窗傅里叶变换(windowed Fourier transform,WFT)在时间信号分析领域被称为短时傅里叶变换。WFT将信号乘以一个有限窗口再进行傅里叶变换,从而得到窗口内信号的频率信息。窗口逐渐移动,则可以得到信号在不同位置(时间)处的局部频率信息。最常用的窗口是高斯窗。信号f(x)的WFT可表示为

基于 WFT,Qian[3]提出了一种用于光学干涉条纹图位相提取的加窗傅里叶脊(windowed Fourier ridges,WFR)算法。加窗傅里叶脊是指针对某个u值振幅谱|Sf(u,ξ)|的最大值,此时对应的频率ξ被近似认为是信号的当地频率。对一个形如f(x)=B(x)exp{jφ(x)}的复信号,WFR 提取位相φ(x)和位相导数φ'(x)的算法可由式(2)表示。

选择合适的窗口尺寸[4],WFR可以精确提取信号的导数。结构的模态亦可看成形如f(x)=B(x)exp{jφ(x)}的复信号,如欧拉梁在自由、固支或简支的边界条件下,其模态的解析解为双曲函数和三角函数的表达式,均可以用指数函数来表示。因此,WFR算法也适用于提取位移模态的2阶导数,即曲率模态。
2 实验验证
通过对加工完整的和含裂纹的悬臂梁进行实验验证本算法。梁的长、宽、高分别为270、10和10 mm,材料为纯铝。裂纹采用线切割加工,为张开型裂纹,相对深度(裂纹深度/梁的厚度)为0.4,位于距离悬臂梁固支端135 mm处,其相对位置(裂纹与固支端距离/梁的长度)e为0.5。由于传感器的附加质量会影响测量精度,因此本文采用了一种新的激光多普勒测振装置(laser Doppler vibrometer,LDV)[5]来对梁的模态进行非接触式测量。该测振装置采用单光源和单个光探测器,能实现多点的同步测量。测量点为14个,位于梁的中心线上,距固支端的距离分别为70+(i-1)×10 mm,i=1,2,3,…,14。实验装置及光路设置如图1所示。
测量结果如图2所示。图2中横坐标为相对位置。对LDV测量得到的梁的2阶位移模态,通过分段三次Hermite插值算法进行插值,以提高其空间分辨率,然后分别采用WFR和中心差分法提取梁的曲率模态。插值点数据依赖于实测点,因此插值法可以提高分辨率,但不能提高中心差分法的计算精度。WFR算法由于具有局域滤波的能力,可以提取更加精确的曲率模态。图3为完整梁和裂纹梁曲率模态的绝对差值。采用WFR算法,曲率模态差在裂纹位置出现明显的尖峰;而采用中心差分法,由于曲率模态的计算误差太大,无法进行裂纹定位。并且,距离裂纹最近的采样点位于e=0.481和0.520处,但裂纹定位却能精确到e=0.498,可见将插值法和WFR算法结合能大幅提高空间分辨率和检测精度。
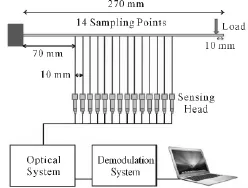
图1 实验装置及光路设置
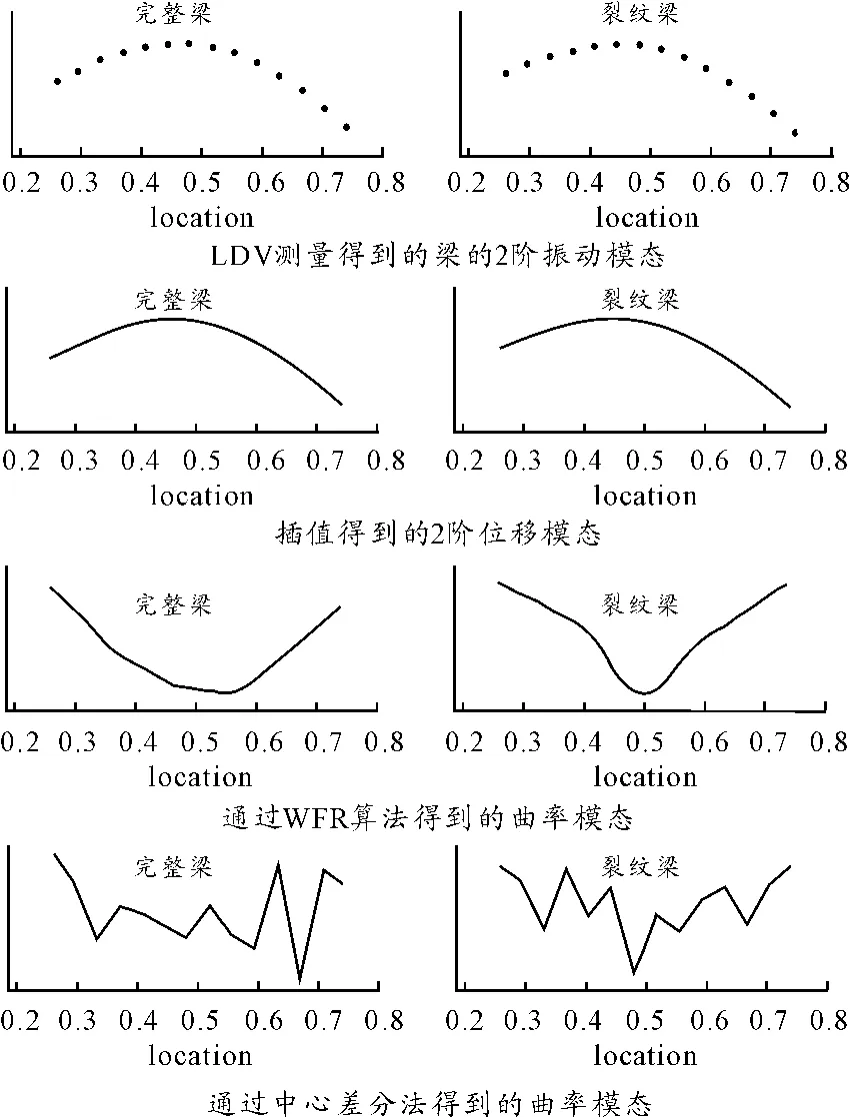
图2 完整梁和裂纹梁的模态和曲率模态对比
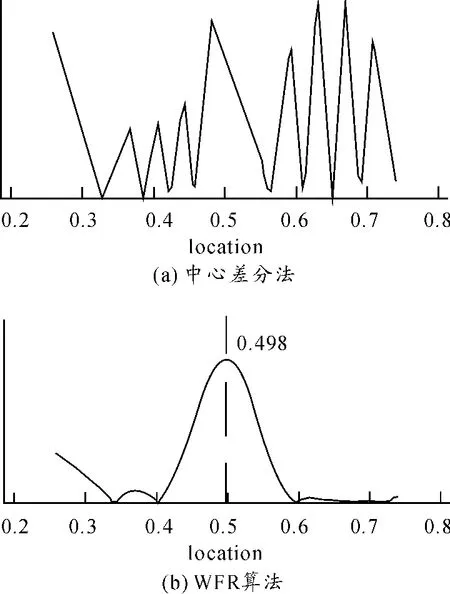
图3 采用中心差分法和WFR算法得到的完整梁和裂纹梁曲率模态差
3 结束语
本文提出了一种基于插值和加窗傅里叶变换的曲率模态提取算法。由于模态测量比较复杂,并且通常传感器的数量有限,导致测量的空间分辨率和精度较低。这种情况下,采用常见的中心差分法计算曲率模态的误差很大。本文通过插值来提高分辨率,采用加窗傅里叶变换算法提高曲率模态的计算精度。实验结果表明:该算法能精确地提取曲率模态,准确地定位悬臂梁上的裂纹位置。值得注意的是,由于插值法的精度依赖于实际采样点,因此采样本身的分辨率仍然是决定裂纹定位精度的主要因素。对于大尺度或者是高精度的测量,在测量点有限的情况下,可以采用分段检测或者多次测量逐渐缩小测量范围的方法,从而保证测量精度。
[1]Kim J T,Ryu Y S,Cho H M.Damage identification in beam-type structures:Frequency-based method vs modeshape-based method[J].Eng Struct,2003,25(1):57 -67.
[2]Pandey A K,Biswas M,Samman M M.Damage detection from changes in curvature mode shapes[J].J Sound Vib,1991,145:321 -332.
[3]Qian K.Two-dimensional windowed Fourier transform for fringe pattern analysis:principles,applications and implementations[J].Opt Lasers Eng,2007,45(2):304 -317.
[4]Yang C,Lu Q,Zhao J.Window size selection in windowed Fourier transform for phase retrieval[J].Opt Lasers Eng,2009,48(11):1096 -1103.
[5]Fu Y,Guo M,Phua P B.Multipoint laser Doppler vibrometry with single detector:principles,implementations,and signal analyses[J].Appl Opt,2011,50(10):1280-1288.
猜你喜欢
中国港湾建设(2022年12期)2022-12-28
数学物理学报(2022年4期)2022-08-22
数学物理学报(2022年2期)2022-04-26
湖南理工学院学报(自然科学版)(2022年1期)2022-03-16
数学物理学报(2019年5期)2019-11-29
数学物理学报(2019年2期)2019-05-10
测控技术(2018年7期)2018-12-09
舰船科学技术(2016年1期)2016-02-27
电测与仪表(2015年5期)2015-04-09
物探化探计算技术(2015年2期)2015-02-28