基于Ahmed模型的外流场数值模拟
2013-08-01 11:38赖晨光
重庆理工大学学报(自然科学) 2013年9期
刘 训,赖晨光
(重庆理工大学车辆工程学院,重庆 400054)
随着高速公路的发展,汽车车速不断提高,这对汽车的操纵稳定性、安全性提出了越来越高的要求。同时由于石油价格的不断上涨,改善汽车的燃油经济性成为重要研究方向。汽车空气动力特性对汽车的动力性、经济性和操纵稳定性有直接的影响[1-2]。风洞试验是汽车空气动力学研究的主要手段,但试验周期长,花费高。近年来,随着计算机的发展,数值模拟方法取得了很大的进展,成为风洞试验一个很好的补充。本文采用CFD软件Fluent,用RANS法和DES法分别对Ahmed的外流场进行稳态和瞬态数值模拟,并通过对比两者的结果,探讨了DES法在汽车外流场数值模拟中的应用,为进一步分析汽车外流场特性,特别是探明尾流的结构和尾涡形成机制提供了参考。
1 模型的选择
由于实车模型表面形状复杂,在生成所需计算网格的过程中会花去大量的时间,因此在进行一些基础研究时使用简化模型。Ahmed模型的几何形状为类车体,由SR Ahmed在1984年为研究时均汽车尾涡时设计。Ahmed模型的外流场能产生除转动车轮、发动机机舱、车身底和表面突起物外真实车辆外流场的基本特征。其尾部有着不同的造型,能够产生不同的尾部流场,在汽车外流场研究中得到了广泛的应用,国内外很多学者对Ahmed模型的外流场特征做了深入研究。由于25°尾部倾角接近临界角30°,其气流情况更为复杂,本文研究尾部倾角为25°时Ahmed模型的外流场。模型尺寸为长1 044 mm,宽389 mm,高288 mm,前部倒圆角半径为100 mm。Catia中建立的Ahmed模型几何形状如图1所示。
图1 Catia中建立的Ahmed模型
2 网格生成及边界条件设置
2.1 网格生成
用前处理软件ICEM-CFD生成计算所需网格(图2)。计算域入口距离模型前表面2倍车长,出口距离模型后表面10倍车长。宽度为7倍车宽,高度为7倍车高。由于Ahmed模型相对简单,同时考虑到计算精度和时间,在整个计算域生成结构化网格。在靠近模型的近壁处生成O形网格,最后进行节点调整,生成质量较好的六面体结构化网格。网格总数约为300万个。图3为边界层网格放大图。
2.2 边界条件设置
入口边界设为速度入口边界,U=20 m/s。出口为压力出口边界,表压 P=0。湍流强度为0.8%,入口水力直径为0.330 9 m。模型表面为固定无滑移壁面,其他壁面设为移动壁面,模拟空气的自由流动。
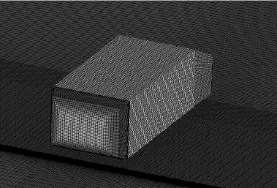
图2 网格示意图
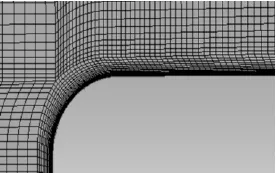
图3 边界层网格放大图
3 雷诺平均法(RANS)与分离涡法(DES)比较
3.1 雷诺平均法(RANS)
对于湍流的数值模拟,可分为直接数值模拟方法和非直接数值模拟方法。直接数值模拟法(DNS)即直接用瞬时的Navier-Stokes方程对湍流进行计算,但是其对计算机的内存和速度要求非常高,以目前的硬件条件还无法用于工程计算。从工程应用的观点上看,没有必要得到湍流三维时间相关的全部细节,关注的是湍流引起的平均流场的变化,由此产生了雷诺平均法(RANS)。RANS法不直接求解瞬时的Navier-Stokes方程,而是求解时均化的雷诺方程。雷诺平均法是目前使用广泛的湍流数值模拟方法。在工程应用中,有以下几种经常被使用的湍流模型:
1)标准k-ε模型。这是一个两方程模型,是在一方程模型上引入一个关于湍流耗散率ε的方程后形成的。
2)RNG k-ε模型。该模型通过在大尺度运动和修正后的黏度项体现小尺度的影响。与标准模型相比,其主要变化是通过修正湍动黏度,考虑了平均流动中的旋转及旋流流动情况,可以更好地处理高应变率及流线弯曲程度较大的流动。
3)Realizable k-ε模型。与标准模型相比,Realizable k-ε模型有以下几个主要变化:① 湍流粘度计算公式发生了变化,引入了与旋转和曲率相关的内容;② ε方程中的倒数第二项不具有任何奇异性,即使k值很小或为0,分母也不会为0。Realizable k-ε模型能有效模拟各种不同类型的流动,包括旋转均匀剪切流、包含有射流和混合流的自由流动、管道内流动、边界层流动,以及带有分离的流动等[3-4]。
3.2 分离涡模拟法(DES)
RANS法的基本思想是对N-S方程做时间平均,将湍流运动的各种瞬时量表示成时均值与脉动值之和,对产生的未知的附加雷诺应力项建立湍流模型来使方程封闭。然而,汽车钝头体的外流场,特别是尾流是十分复杂的,具有强三维分离特性的非稳态流场,有非定常、湍流、旋涡分离等典型流动特征。因此,采用时间平均的RANS法对类车体外流场进行数值模拟时,很难完全准确地述其流场特征。
进行瞬态数值模拟时,一般采用LES(大涡模拟)法。其思想是建立数学滤波函数,把湍流瞬时运动方程中尺度比滤波函数小的涡过滤掉,只将比网格尺寸大的湍流运动通过瞬时N-S方程直接进行计算,很大程度上克服了雷诺平均的缺点。但是该方法需要较多的计算机硬件资源,计算所需时间长,并对网格也有着较高的要求[5]。近年来发展起来的分离涡(DES)模拟将时间平均和空间过滤的湍流模型结合起来,只是在分离涡现象明显的区域采用LES方法计算,在近壁区域和不受分离涡影响的远场都采用RANS模型求解[6]。这样既能得出较精确的结果,又能减少工作量,是计算湍流的一种经济而有效的方法。
本文采用基于SST k-ω湍流模型的DES法,其中k和ω的方程分别为:
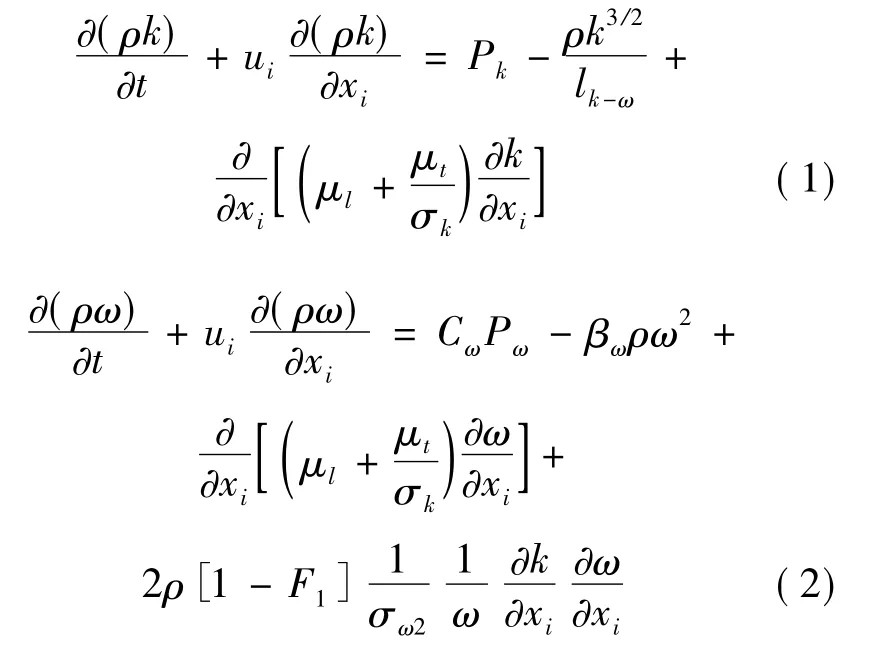
黏性系数方程由式(3)确定:

式(1)和(2)中的Pk和Pω为湍流生成项,定义参见文献[4]。
k方程耗散项中的湍流尺度参数的表达式为

在DES法中,RANS和LES的分辨尺由式(4)确定。

式(4)中:系数CDES=0.65;Δ为网格尺度。
与k-ε模型相比,k-ω更适宜于低雷诺数下的近壁处理。SST k-ω模型是基于k-ω模型且考虑剪切应力运输的,它不包含类似于k-ε模型中的复杂非线性粘性衰减项,更适合具有分离特性的汽车外流场数值模拟。
4 实验结果比较及分析
4.1 阻力及升力系数分析
先用RANS法对Ahmed模型外流场进行稳态数值模拟,采用3种常见的湍流模型分别进行模拟计算。然后用基于SST k-ω模型的DES法进行瞬态模拟计算,得到其阻力系数和升力系数,并将所得结果与文献[7-8]中的试验值进行比较。选用分离式SIMPLE算法,空间离散度为二阶精度。DES法中计算时间步长为0.000 5 s,每个时间步内的最大迭代次数为20步。
从表1可以看出:使用Standard k-ε模型计算得到的阻力系数明显偏大,误差达到30%。这说明其不适合用来模拟具有漩涡、分离特性的汽车外流场。RNG k-ε模型,Realizable k-ε模型和SST法模拟效果较好,误差均在5%以内。Realizable k-ε计算的准确度最高,误差为1.37%。
从表2可以看出:三种常用的湍流模型在计算升力系数时,得到的数值均比试验值要小,且误差均超过5%。其中Realizable k-ε得到的结果误差相对较小。使用DES法计算时,得到的升力系数同样比试验值小,误差达到22%。
通过分析表1和表2的数据可以得知:在计算阻力和升力系数时,RANS法和DES法没有太大的差别。
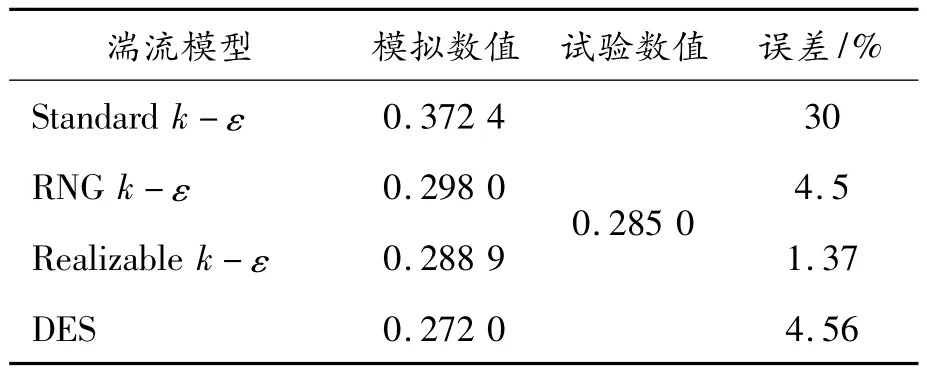
表1 阻力系数仿真值与试验值对比
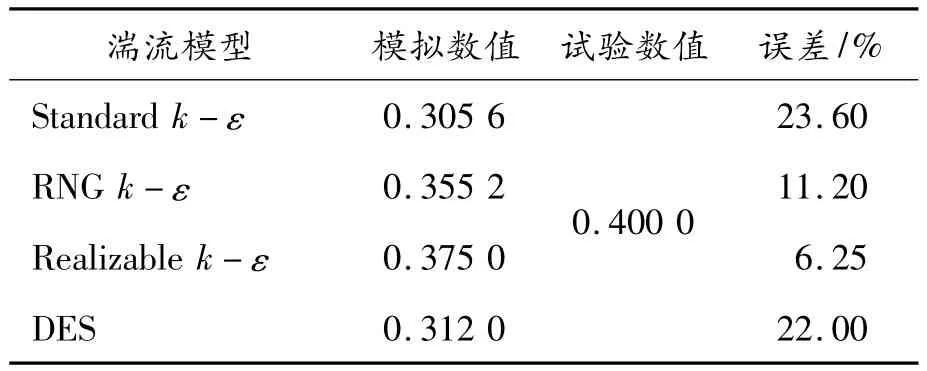
表2 升力系数仿真值与试验值对比
4.2 阻力成分分析
对采用 Realizable k-ε模型的 RANS法和DES法得出的计算结果进行分析比较。
图4中:CK为头部压差阻力系数;CS为尾部倾斜面压差阻力系数;CB为尾部垂直面压差阻力系数;CR为空气黏性引起的摩擦阻力因数。
从表3可以看出:RANS法和DES法得到的CR、CS和CB差别不大,都接近试验值。DES法得到的CK值比RANS法更接近试验值。
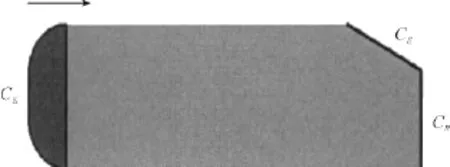
图4 Ahmed模型钝体阻力成分示意图
由表3还可以得知:阻力系数主要由压差阻力系数构成。这说明汽车在行驶过程中所受空气阻力主要为压差阻力,由空气黏性引起的摩擦阻力很小。
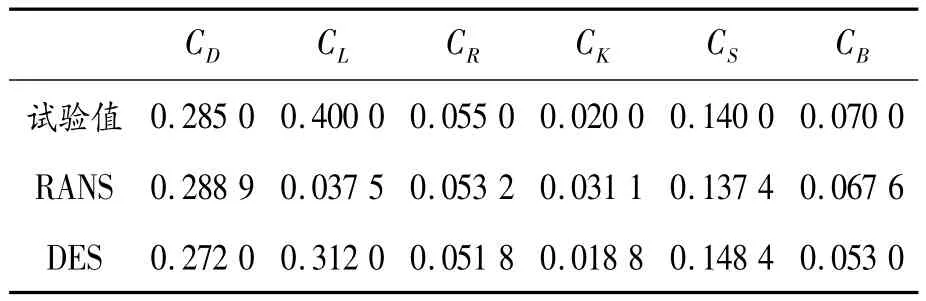
表3 Ahmed模型各阻力成分时均值
4.3 压力场分析
从图5和图6可以看出:在模型前部上下缘和尾部倾斜面处有负压极值区,说明气流在此处发生了气流分离。
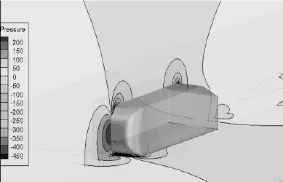
图5 时均压力场分布正侧视图

图6 时均压力场分布后侧视图
4.4 尾部流场分析
从图7可得知:气流在尾部形成2个漩涡,上面的漩涡以顺时针方向旋转,下面的漩涡以逆时针方向旋转。这对漩涡就是Ahmed提出的所谓“分离泡”[9]。
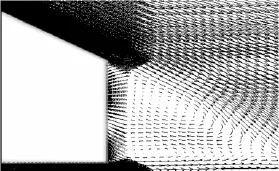
图7 尾部对称面速度矢量图
从图8和图9可以看出:尾部涡系数呈现出明显的三维结构特性。从斜背开始出现一对反向旋转的拖拽涡。从能量的角度来看,此对拖拽涡消耗了能量,使得尾部压强降低,产生压差阻力。
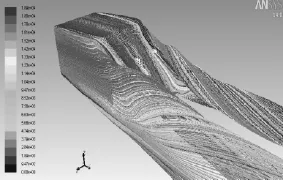
图8 Ahmed模型尾部涡系后侧视图
图9 Ahmed模型尾部涡系俯视图
从图10可以看出:尾部旋转方向相反的拖拽涡在尾部斜面上开始形成,发展,最后随着离模型尾部距离变远,慢慢消散。
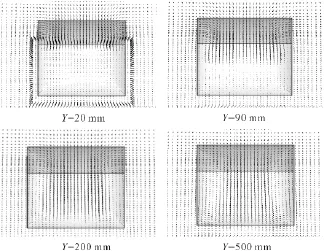
图10 尾部不同截面处的速度矢量图
4.5 尾部湍动能分布分析
图11为采用RANS法和DES法得到的Ahmed模型尾部等间距(400 mm)截面湍动能分布。由图11可以看出:距离尾部较近处,RANS法和DES法得到的湍动能分布情况比较相似,距离尾部越远,两者差别越大。通过比较可知:DES法得到的湍动能分布更为合理,RANS法计算得到的湍动能偏高,k-ε模型过高估计了湍动能。

图11 Ahmed模型尾部等间距(400 mm)截面湍动能分布
5 结束语
1)汽车行驶时所受的空气阻力主要由压差阻力构成,尾流结构与压差阻力有着密切关系。
2)在计算气动阻力系数时,采用Realizable k-ε模型效果最好。
3)计算气动升力系数时,数值模拟方法与试验方法的误差较大。目前还没有湍流模型能够准确地模拟计算升力系数,主要采用Realizable k-ε模型计算升力系数,效果较好。
4)在模拟时均值方面,RANS法和DES法差别不大。但是在捕捉尾部湍动能上两者有着较大的差异,DES法能更好地捕捉类车体尾部的含能结构,更准确地反映其尾流特征。
由于汽车外流场的复杂性和湍流理论尚未完善,加上本文所选取的模型比较简单,只是模拟了模型的外流场,因此未来可以从以下几方面展开进一步研究:
1)选取包含车轮、轮腔等细节,外形更复杂更贴近于真实汽车的模型进行数值模拟。
2)尝试将汽车的内、外流场一起进行模拟,以更贴近于实际情况。
3)进一步完善前处理划分网格技术,生成更合理和质量更高的计算网格,用LES大涡模拟进行瞬态计算以进一步研究汽车的尾流。
[1]傅立敏.汽车设计与空气动力学[M].北京:机械工业出版社,2011.
[2]谷正气.汽车空气动力学[M].北京:人民交通出版社,2005:80-88.
[3]王福军.计算流体力学分析-CFD软件原理与应用[M].北京:清华大学出版社,2004.
[4]Menter F R.Zonal k-ω Two Equation Turbulence Models for Aero-dynamics Flow[C]//AIAA 1993-2906.USA:[s.n.],1993.
[5]Andreas Borg,Sven Perzon,Olga Roditcheva.On the Influence of the Near Wall Formulation of Turbulence Models forPrediction ofAerodynamicsCoefficientsfor Ground Vehicles[J].SAE Paper ,2003(1):1317.
[6]Wassen E,Thiele F.LES of Wake Control for a Genertic Fastback Vehicle[C]//AIAA 2007-4504.2007.
[7]Baynaktar I ,Landnan D.Ground Influence on external Ground Vehicle Aerodynamics[C]//IMECE2003-41224.Washington:[s.n.],2003.
[8]Sinisa K rajnovic,Lars D avidson.Influence of Floor Motions in Wind Tunnels on the Aerodynamics of Road Vehicle[J].Journal of Wind Engineering and Industrial Aerodynamics,2005,93:677 -696.
[9]Ahmed S R,Ramm G,Faltin G.Some Salient Features of the Time-averaged Ground Vehicle Wake[J].SAE Paper,1984(3).
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
汽车实用技术(2022年10期)2022-06-09
中国临床医学影像杂志(2021年6期)2021-08-14
空气动力学学报(2020年1期)2020-11-29
活力(2019年17期)2019-11-26
中国特种设备安全(2018年10期)2018-12-18
广西警察学院学报(2016年5期)2016-02-27
中国塑料(2015年4期)2015-10-14
国外科技新书评介(2014年5期)2014-12-17
应用技术学报(2014年1期)2014-02-28