基于Link 16与DGPS的组合导航系统
2013-07-25 02:28郑晓东秦红磊
计算机工程与设计 2013年2期
郑晓东,丛 丽,秦红磊,许 鹏
(北京航空航天大学电子信息工程学院,北京100191)
0 引言
联合战术信息分布系统 (JTIDS)是美军20世纪70年代开始研制、80年代开始装备的数据链系统,由TDMA协议,JTIDS波形和TADIL J消息标准组成,具有集成的通信、导航和识别能力[1-2]。为改善、增强JTIDS系统功能,JTIDS与其他导航系统组合逐渐为人所采用,其中JTIDS/INS/GPS组合导航系统[3]得到了广泛研究和应用。随着导航定位技术的发展,导航定位应用到了各种领域,同时很多应用对导航定位精度的要求也日趋提高,此时JTIDS/INS/GPS组合导航不能满足这些应用对高精度定位的要求。
将差分GPS[4]引入到 JTIDS/INS/GPS组合导航中,如果差分GPS的基准站是独立于JTIDS之外的,不能融入到整个JTIDS网络中实现统一控制和资源分配,将使得差分GPS的基准站不容易控制,而且由于差分GPS的通信链路没有使用Link 16一样的抗干扰技术,因此传输差分信息时容易受到干扰,同时差分GPS为了传输伪距差分信息,需要专门的通信传输链路,占用了资源,使得整个系统趋向于复杂化。
为了实现差分GPS的伪距差分信息的高效传输,同时在实现功能的基础上简化系统,节省资源,本文提出的JTIDS/INS/DGPS组合导航系统新体制,即组合导航系统中JTIDS的地理位置基准同时作为差分GPS的基准站,利用Link 16的通信链路传输伪距差分信息给网络中其他成员,在新的体制下合理了设计伪距差分信息传输的内容和传输格式。
1 JTIDS/INS/DGPS组合导航系统新体制总体工作流程
本文提出的JTIDS/INS/DGPS组合导航系统新体制工作示意图如图1所示,其工作流程为:JTIDS网络中地理位置基准兼任差分GPS的基准站,基准站每一帧12 s播发一次伪距差分信息,基准站的导航时隙若为播发伪距差分信息时隙,则基准站将伪距修正数、伪距修正数变化率等差分信息,以TADIL J消息的格式通过Link 16的通信链路与P消息一起播发出去。若基准站时隙不播发差分信息,则进行RTT或者只播发P消息。其他成员在非自己播发时隙先进行源选择,地理位置基准对其他成员均被选择为源,如果接收到基准站播发的伪距差分信息,先判断是否在差分信息的作用区域,若是则对与基准站共视星的伪距进行修正;没有接收到基准站的差分信息则判断之前接收到的差分信息是否有效,若有效则对相对应的共视星进行伪距修正,然后进行组合导航滤波得到定位结果。
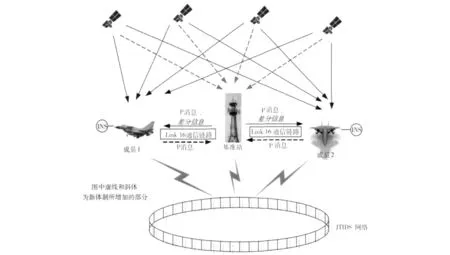
图1 JTIDS/INS/DGPS组合导航系统工作
2 伪距差分信息内容的选取与传输格式
JTIDS/INS/DGPS组合导航系统新体制中伪距修正数,伪距修正数等差分信息以TADIL J消息格式与P消息一起通过Link 16中的通信链路发送给其他成员,因此需要对传输的伪距差分的内容进行选择和格式进行设计。基准站传输的伪距差分信息内容选取参照RTCM SC-104中电文Type 1(差分GPS改正数)和电文Type 2(△伪距改正值和△距离变化率改正值)[5],伪距差分信息的传输格式严格按照TADIL J消息格式进行设计,本文采用TADIL J消息的P4SP封装结构,在一个导航时隙总共传输12个字,分两个消息,其中第一个消息用来传输P消息,第二个消息用来传输伪距差分信息。
选择传输电文Type 1时,需要发送的信息如下:①电文类型,1bit;②基站识别,1bit;③修正Z计数,13 bits;④基台状况,3 bits;⑤SF比例因子,1 bits;⑥卫星识别ID,5 bits;⑦IOD数据发布日期,8bits;⑧伪距修正数PRC,16 bits;⑨伪距率修正数RRC,8bits;⑩相关距离D,8bits。
选择传输Type2中如下伪距差分信息:①电文类型,1bit,0表示Type1,1表示Type2;②基站识别,1bit;③修正Z计数,13 bits;④基台状况,3 bits;⑤SF比例因子,1 bits;⑥卫星识别ID,5 bits;⑦IOD数据发布日期,8bits;⑧△伪距修正数PRC,16 bits;⑨△伪距率修正数RRC,8bits;⑩相关距离D,8bits。
以传输伪距、伪距修正数变化率的J消息的初始字为例说明格式,如图2所示,每个初始字有5b的J系列标识符、3b的J系列子标识 (7~9位)以及3b(10~12)的消息长度指示符 (MLI)。
3 JTIDS/INS/DGPS组合导航定位解算的实现
文中采用联邦滤波器结构,包括两个子滤波器和一个主滤波器。其中两个子滤波器为DGPS/INS子滤波器和JTIDS/INS子滤波器,两个子滤波器通过主滤波器融合得到最终的定位结果。
3.1 伪距修正
其他成员接收基准站发送的P消息和伪距差分信息,若需要进行伪距修正,则根据基准站发送的伪距差分信息不同,进行修正的方法也不同。
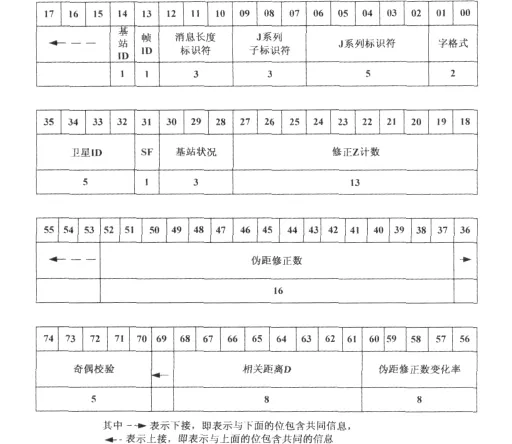
图2 初始字格式
(1)若发送的是伪距修正数、伪距修正数变化率信息,则修正过程如下:
第一,政策环境优越,政府高度重视。物联网产业的发展得到了辽宁省各级领导的高度重视,物联网已经上升为国家经济社会发展战略。第二,市场需求巨大,发展前景广阔。
时刻t的伪距修正数为

式中:PRC(t0)——16bit的伪距修正数,RRC——8bit伪距修正数变化率。t0——由第二个头字得到的修正Z计数。
(2)若基准站发送的是伪距修正数、伪距修正数变化率和△伪距改正值和△距离变化率改正值,利用下式计算出正确的伪距改正值
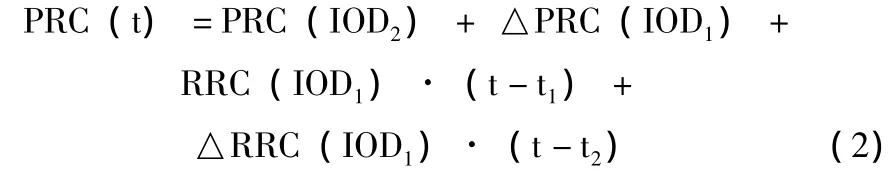
式中:PRC(IOD2)——接收到电文1中的伪距修正数,△PRC(IOD1)——接收到得电文2中的△伪距改正值(由上一次PRC减去当前PRC求得的),RRC(IOD1)为接收到电文1中的伪距修正数变化率,t1是由第二个头字得到的修正Z计数,△RRC(IOD1)接收到得电文2中的△距离变化率改正值 (由上一次RRC减去当前RRC求得的)。
由用户测量得到的伪距PRM (t) 最终纠正如下

3.2 JTIDS/INS子滤波器
JTIDS/INS子滤波器分解为高度滤波器和平面位置滤波器,高度滤波器的状态量和观测量分别为(即INS高度误差δh和天向速度误差δV)、Zbv=hB-hI(引入BA高度数据后,观测量为BA输出高度hB与INS输出高度hI之差),平面位置滤波器的状态量和观测量分别为Xh(其中e,n,u为 INS 东向、北向、天向平台误差角,δλ,δL为INS经度和纬度误差,δVe,δVn为INS东向、和北向速度误差)、Zρ= ρTOA- rc(相对导航用户端机提供的TOA伪距差观测量为测量伪距与计算距离之差)。
3.3 GPS/INS子滤波器
GPS/INS子 滤 波 器,其 状 态 量 X = [e(用户位置误差、速度误差、姿态角、GPS时钟的钟差和频差),观测量为GPS/INS组合导航系统提供GPS测得的伪距ρGj和INS的计算伪距ρIj两者得到的伪距之差ρGj-ρIj和两者相应的伪距率作为组合导航系统的伪距、伪距率。具体实现可以参阅参考文献[1]。
4 仿真实现与分析
4.1 仿真条件
仿真中JTIDS网络包含了10个成员,除地理位置基准之外其他成员模拟为运动的飞机成员,飞行轨迹包括平飞、转弯、爬升、俯冲等飞行状态。其中成员1和2的角色为地理位置基准 (GR),且成员1兼任导航控制者 (NC),担任网络时间基准的是成员3,能做有源校时的一级成员有4到7,剩下的成员是二级成员。JTIDS成员端机的参数为:时钟频率随机误差3×10-6/h,相关时间7200s,端机测距噪声为10m(1 sigma)。GPS接收机的输出频率为1HZ,建立伪距模型如下

式中:r——接收机到卫星之间的真实距离;δeph——卫星星历误差,无差分设为2 m(1σ),有差分时为0;δion——电离层延迟误差,无差分时设为6 m(1σ),有差分设为0.3 m(1σ),且与播发伪距差分信息时间间隔的关系为0.08 m/s,与基准站距离的关系为0.2 cm/Km;δtrop——对流层延迟误差,无差分时设为2.4 m(1σ),有差分设为0.2 m(1σ),且与播发伪距差分信息时间间隔的关系为0.06 m/s,与基准站距离的关系为2 cm/Km;c——光速,T——接收机钟差;δmp——多径误差,无差分和有差分都为0.8 m(1σ);Vrevr——接收机噪声,无差分和有差分都为0.4 m(1σ);δST——卫星时钟模型误差,无差分设为2 m(1σ),有差分时为0;伪距率误差为0.1 m/s(1σ)。对于采用伪距差分信息的用户站,还要考虑可见星,只有当用户站与基准站有相同的可见星时,才应用伪距差分信息。滤波周期为JTIDS导航时隙间隔0.0625 s,仿真时间为1000 s。本文以一级成员6为例给出不同情况的性能分析,所有成员在1000 s中的运动轨迹如图3所示,成员6运动轨迹的起点的经纬度为东经112.7,北纬38.4。
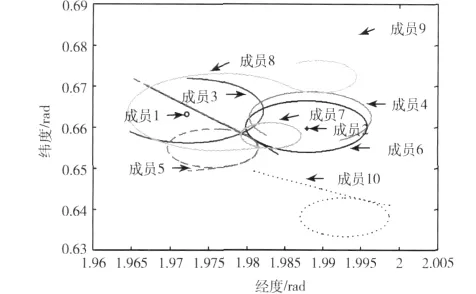
图3 成员1-10在1000s中的运动轨迹
4.2 仿真结果及分析
(1)无差分三组合和单基准差分三组合性能比较
JTIDS/INS/GPS组合导航系统、单基准JTIDS/INS/DGPS组合导航系统仿真1000s时间的纬度、经度和高度距离误差曲线比较如图4所示,并统计了1000s时间纬度、经度和高度距离误差的均方根值以及相对导航的圆概率误差如图5所示。
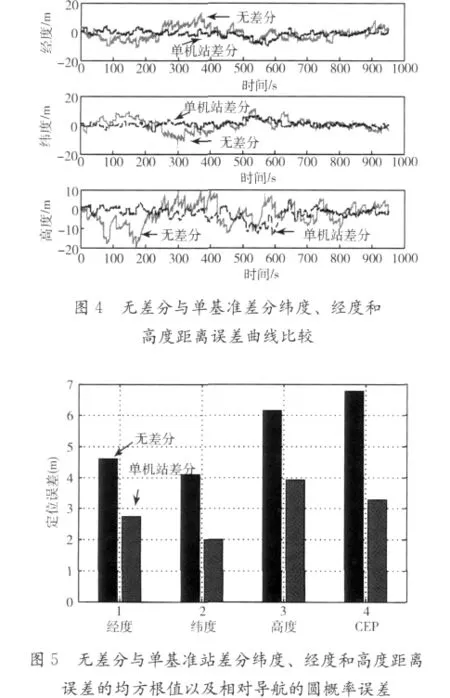
由图5可以看出,单基准应用差分三组合导航较之JTIDS/INS/GPS的纬度、经度和高度距离误差的均方根值提高2 m左右,而相对导航的圆概率误差要提高3.5 m左右。由于差分技术可以完全消除GPS伪距测量的卫星钟误差、星历误差;大部分消除电离层误差、对流层误差,从而差分GPS较之单机GPS定位能显著提高定位精度,进而提高三组合导航定位精度。
(2)单基准差分三组合和双基准差分三组合性能比较
单基准JTIDS/INS/DGPS组合导航系统和双基准JTIDS/INS/DGPS组合导航系统仿真1000 s时间的纬度、经度和高度距离误差曲线比较如图6所示,1000 s时间纬度、经度和高度距离误差的均方根值以及相对导航的圆概率误差比较如图7所示。
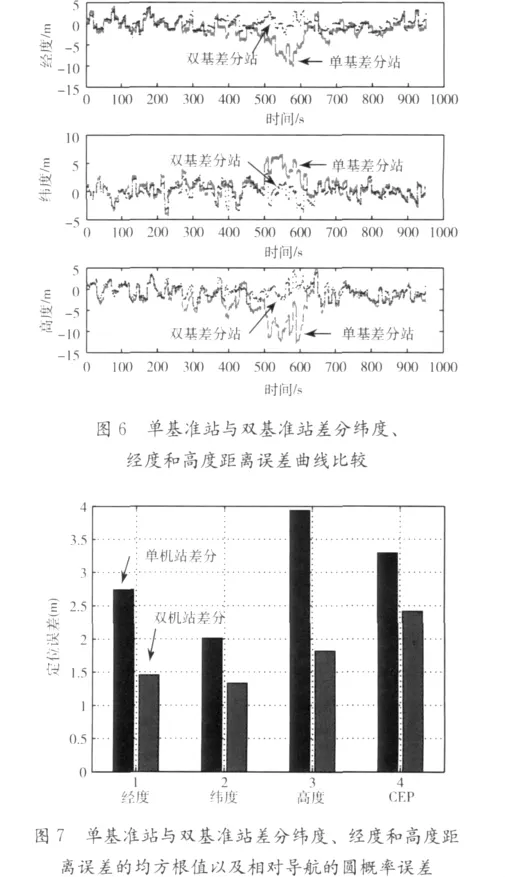
由上图可以看出,双基准三组合导航较之单基准三组合导航的纬度、经度和高度距离误差的均方根值提高1m左右,而相对导航的圆概率误差要提高1 m左右。由于2个差分基准站使得应用差分GPS区域增大,多成员网络中更多成员可以利用差分信息,同时对于具体成员来说,伪距差分信息的更新率提高,这都使得三组合导航定位精度提高。因此,差分基准站越多,三组合导航性能提高越大,但是成本将会增大,系统越容易受到攻击,抗干扰能力减弱。
5 结束语
鉴于Link 16保密性、强抗干扰性和较高的传输速率,差分GPS能消去测量伪距中大部分误差从而提高定位精度,利用Link 16传输伪距差分信息的JTIDS/INS/DGPS组合导航系统结合Link 16和差分GPS的优点,JTIDS的地理位置基准兼任差分GPS的基准站,让整个系统联系更加紧密,易于统一控制,提高了系统的稳定性;应用Link 16传输伪距差分信息,节省了差分GPS所需的独立通信链路,充分利用了整个系统的资源,节省了成本,降低了系统的复杂度,同时由于Link 16采用了各种加密和抗干扰技术,该方案提高了系统传输差分信息的抗干扰能力,使得系统的应用性得到增强。通过VC++编程仿真实现,验证了本文提出的方案的可行性与有效性,为实际应用到对高精度定位要求环境与某些特定环境中提供了理论基础。
[1]MEI Wenhua,CAIPufa.JTIDS/Link16 data link [M].Beijing:National Defense Industrial Press,2007:125-142(in Chinese).[梅文华,蔡普法.JTIDS/Link16数据链[M].北京:国防工业出版社,2007:125-142.]
[2]L Na,DU Sishen,ZHANG Yuetong.Theory and system of data link[M].Beijing:Publishing House of Electronics Industry,2011:243-281(in Chinese).[吕娜,杜思深,张岳彤.数据链理论与系统[M].北京:电子工业出版社,2011:243-281.]
[3]CONG Li,QIN Honglei.Design and simulation of JTIDS/BA/INS/GPSnavigation processor software[J].Journal of Astronautics,2008,29(4):1233-1238(in Chinese).[丛丽,秦红磊.JTIDS/BA/INS/GPS组合导航处理器软件设计与仿真[J].宇航学报,2008,29(4):1233-1238.]
[4]Misra Pratap & Per Enge.Global Positioning System,Signals,Measurements and Performances[M].2nd ed.Beijing:Publishing House of Electronics Industry,2008:142-148(in Chinese).[Misra Pratap&Per Enge.全球定位系统—信号、测量与性能[M].2版.北京:电子工业出版社,2008:142-148.]
[5]LI Sichao,YE Tianchun,XU Jianhua.Introduction and decoding arithmetic& realization of RTCM data format of DGPS[J].Electronic Measurement Technology,2008,31(12):11-14(in Chinese).[李思超,叶甜春,徐建华.DGPSRTCM数据格式简介及其解码算法实现 [J].电子测量技术,2008,31(12):11-14.]
[6]Xu Yinglei,Li Qunzhan,Xie Shaofeng,et al.Study on algorithm and communication protocol of differential GPSpositioning based on pseudo range [J].Information Technology and Application,2009,1(3):606-609.
[7]Kong Fancheng,Dai Gelin,Cai Lei.The composed correcting Kalman filtering method for integrated SINS/GPS navigation system[J].Intelligent Computing and Intelligent System,2010,2(2):408-412.
[8]He Zhaoxiong,Liu Xing.Link-16 model architecture for multiple nets simulation in NS-2 [J].Industrial Engineering and EngineeringManagement,2010,10(1):1645-1649.
[9]Wu Qiuping,Han Fengtian.Development of multisensory integrated navigation system based on distributed multiprocessor[J].E-lectronics Measurement& Instruments,2009,9(1):338-341.
[10]Wang Liang,Wu Cheng.Application of DGPS simulator in HIL simulation of aerocraft[J].System Simulation and Scientific Computing,2008,7(8):562-564.
猜你喜欢
数学杂志(2022年5期)2022-12-02
地理空间信息(2022年10期)2022-10-31
湘潭大学自然科学学报(2022年2期)2022-07-28
现代测绘(2022年3期)2022-07-23
新世纪智能(数学备考)(2021年5期)2021-07-28
中学生数理化·八年级物理人教版(2020年11期)2020-12-14
中学生数理化·八年级物理人教版(2018年4期)2018-06-27
中国惯性技术学报(2017年1期)2017-06-09
测绘通报(2016年12期)2017-01-06
百科探秘·航空航天(2016年9期)2016-12-01