
鞍山市连续运行参考站系统建设与定位精度分析
2013-07-25 07:49马洪滨周海壮陈永生
导航定位学报 2013年1期
马洪滨,孙 军,周海壮,陈永生
(1.东北大学 资源与土木工程学院,沈阳 110819;2.沈阳天信测绘科技有限公司,沈阳 100016)
1 引言
城市数字化和数字城市是现代城市的发展趋势,城市空间信息基础设施是数字城市的基础[1],鞍山市连续运行参考站 (简称ASCORS)网络系统是鞍山市城市空间数据基础设施的重要组成部分,其基本任务是在鞍山建立一个高精度、高时空分辨率、高效率、高覆盖率的GNSS综合信息服务网,把CORS这一高新技术综合应用于鞍山市的大地测量、工程测量、地籍测量、土地勘测、气象测量、地震监测、地面沉降监测以及城市地理信息系统等领域。同时兼顾社会公共定位服务,以满足日益增长的城市综合管理与城市化建设的需要,为促进鞍山市经济又好又快地、持续地健康发展提供空间基本信息。它将在数字鞍山的建设和鞍山市的国土资源管理与勘察、城市规划、建设、管理中发挥巨大的作用[2-3]。
2 鞍山市连续运行参考站网络系统的建立
2.1 系统概述
鞍山市连续运行参考站系统是由鞍山市国土资源局主管,武汉大学提供系统运行软件开发和技术支持,鞍山市国土资源勘测设计院和东北大学测绘系负责组织实施建设。自2008年4月开始启动以来,分两期建设 (前期4个站,后期3个站),历经2年多的建设,于2009年9月投入试运行,2011年7月正式投入运营。整个系统由1个控制中心 (位于鞍山勘察测绘院机房内)和7个参考站组成 (分别为鞍山科大站、岫岩石庙子站、大营子站、新甸站、海城的孤山子站、西四站和台安站)站间平均70km。覆盖鞍山市全境以及周边一万四千多平方千米。系统参考站和系统中心分布见图1。

图1 参考站分布图
2.2 系统建设
鞍山市连续运行参考站网络系统建设主要包括参考站子系统、通讯网络子系统、系统控制中心与数据处理子系统以及用户应用子系统等[4-7]。
(1)参考站子系统
鞍山市连续运行参考站子系统在分析了CORS参考站网形的空间均匀性以及站间距离的合理性的基础上,由GNSS接收机、双频扼流圈卫星天线及天线保护罩、大容量记忆卡、墩标、不间断电源、通讯网络、雷电防护及其它所需电缆及配件等设备组成。可以24h不间断的接收卫星信号,提供高质量的卫星伪距、相位观测值、星历等数据信息。以满足各参考站所覆盖区域的不同精度、不同类型差分定位的需要以及参考站网络对参考基准维持的需求。
(2)系统控制中心
系统控制与数据处理中心是整个ASCORS的核心单元,中心由计算机网络系统、软件系统等组成,与各参考站之间依靠网络、TCP/IP方式相连。作为整个系统的核心,ASCORS控制中心具备以下功能:数据处理、系统运行监控、信息服务、网络管理、用户管理。根据需要,控制与数据处理中心子系统建在鞍山市国土资源勘测设计院办公楼内,组成独立的局域网,同时配备4台计算机工作站与7台ASHTECH公司生产的GNSS参考站接收机相连,用于遥控和数据采集。其中解算采用两台服务器并行运行,增加整个系统的备用性。各接收机与数据中心之间的通讯采用光纤或ADSL专线 (固定IP)。有条件的地方采用光纤通讯,无光纤的地方采用ADSL专线通讯。通过网络与每个参考站接收机进行通讯,并与其它计算机实现数据共享,支持台站网软件进行数据发布并通过Internet(NTRIP)发送RTD、RTK等差分数据给流动站用户。
(3)数据通讯子系统建设
ASCORS数据通讯子系统主要分为两部分,一部分用于连接参考站和系统控制中心,另一部分用于连接系统数据中心和用户应用系统,在数据通讯子系统的连接下,ASCORS可以实现所覆盖范围内的联网及数据交换。在ASCORS参考站与数据中心间的数据通讯构建中,为7个GNSS参考站和数据中心申请1条光纤和6条ADSL专线宽带线路,并配有固定IP地址的Internet接入。在ASCORS数据中心和用户应用系统数据通讯构建中,考虑了两方面的数据需求。一是实时RTK数据播发的数据通讯,二是事后用户静态数据下载。对于实时RTK数据播发,流动站用户可以使用调制解调器,通过GSM/GPRS来接收RTK改正数据。对于事后静态数据的下载,ASCORS系统将GNSS参考站的数据文件或其他数据检查报告和事件记录文件汇总到数据中心,数据中心记录文件并发送到指定的FTP或Web地址。用户可通过Internet下载必要的数据。
(4)用户应用子系统
ASCORS的用户按照应用的精度不同,可以分为毫米级用户系统,厘米级用户系统、分米级用户系统、亚米级用户系统、米级用户系统。按照应用目的不同又可分为:国土资源系统专业用户 (遍布以上所有精度范围),测绘与工程应用用户 (厘米与分米级),车辆导航与定位用户 (米级),高精度用户 (事后处理)等几类。系统的基本构成是接收数据链、GNSS接收机和中央处理器。按照不同的应用需求,可能还要求具备电子手簿,电子地图、回传数据链等设备。用户单元的设备结构如图2所示。
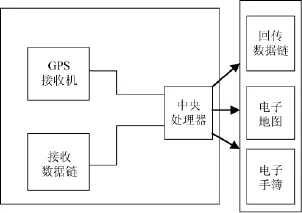
图2 用户单元的设备结构
3 系统测试
为全面验证系统各项技术指标,评定系统是否达到设计要求,2009年11月19日~2009年11月26日鞍山市国土资源勘测设计院和东北大学测绘系组织人员从系统定位精度、定位服务的时效性、空间可用性、时间可用性以及对各种主流GPS接收机的兼容性等方面进行了测试。在已做好的基准框架网中均匀选取20个点作为检测点。检测点基本包括了鞍山市所有区域,既有网内点又有网外点,具有较强的代表性。GPS C级基准框架网共130个点,除去7个CORS站点,共123个GNSS C级网点。检测点的比例占到整个基准网点16.2%。
3.1 初始化时间分析
系统定位服务的初始化时间,即为RTK实时定位的时效性。测量原始数据是由若干个初始化段组成的。初始化时间一般由观测环境、仪器质量以及系统的稳定性决定。
在ASCORS动态定位测试中,记录了不同型号接收机初始化时间。从测试的结果来看,接收机型号不同其初始化时间也不相同,其中Z-x平均初始化时间为18.332s;Z-max平均初始化时间为16.523s;PM500平均初始化时间为14.325s。在整个测试过程中,采用GPRS作为流动站的通讯方式。
3.2 RTK定位精度分析
RTK定位精度测试是为了检测出在实时动态作业条件下,利用系统播发的网络RTK改正信息,通过区分RTK接收参考站差分信息时间的长短进行对比分析,分析待定点的点位精度情况,可以得到的实时定位服务精度及其随时间的变化情况。同样对于12个已知等级点进行网络RTK定位测试。首先选用不同厂家当时最新型号的接收机进行数据采集精度测试,结果几个知名的老GNSS厂家在相同的时间内精度无明显差别,这里没有列出,而同一型号的接收机在不同的数据采集时间其精度却不相同,这里将某型号接收机在12个已知点上分别用30s、60s、300s、900s、1 200s采集数据的平均定位精度计算结果分别为:0.015 75mm;0.012 75mm;0.011 67mm;0.008 75 mm;0.008 17mm,通过定位结果我们可以看出网络RTK定位精度,与观测时间有关,观测时间越长,RTK定位精度越高,同时随着定位时间的延长 (15min左右),精度越趋向稳定,变化幅度减小。这样就可以根据具体测绘项目的精度要求确定其观测时间,从而产生同精度同作业方法可以有不同技术要求的新作业。但也可看出一个事实,一旦RTK出现固定解,再增加的数据采集时间对提高定位精度影响不是很大。
RTK精度测试的12个点是为鞍山建立CORS空间框架系统中用静态方法观测解算的国家C级GNSS点,均匀分布在ASCORS的各个区域,但每个点都是随机选择的,每个点上按照不同时间进行数据采集,仅分析了不同时间间隔数据采集与定位精度之间的关系,没有分析不同方式采集的数据以及在网内不同位置采集的数据对定位精度的影响,为更全面的考核CORS系统的可靠性、稳定性等还需做进一步的分析。
3.3 定位成果的数据统计与分析
ASCORS观测数据成果定位精度指标主要有内符合精度和外符合精度。内符合精度反映了观测数据的质量,外符合精度反映了ASCORS在实际参考框架网中定位生产作业的精度,参考框架网是GPS C级网。
检测方法是不同时段多历元的静态已知点检测法。在每个已知点位上分别观测两个时段,数据采样率为1s。每个时段拨号两次,每次拨号得到固定解后开始记录测量结果,连续观测一定时间,记录一组测试数据 (一般30个历元以上),然后挂断重新拨号记录另一组同样观测时间的固定解结果。
(1)内符合精度
系统内符合是各个历元观测值之间的比较,也是观测值误差收敛程度和稳定性的体现,在工程测量中,是观测点位精度的主要参考指标,统计内符合精度有利于分析系统稳定性。内符合精度数据采集以及计算方法为:在同一点上分别采集100个历元的RTK固定解数据,计算每一测点所有测量值的平均值,再将该平均值与每一测量值求差。统计所有差值的分布情况,并对差值在不同区间的概率进行统计,同时依下式分别计算系统在X,Y,H方向的内符合精度。
误差方程为

其中,L为观测值,为观测值的平均值,因其为等权观测且为单位权,根据最小二乘原理得

内符合精度为

其中,n为每一点观测值总数,Δ为观测值与相应测试平均值的差值M1为系统的内符合精度,反映系统实时定位的稳定性和系统的收敛性。
以网内DGTT一点来进行算例分析:DGTT点位于网内,距离主站AS站16km,如图3所示
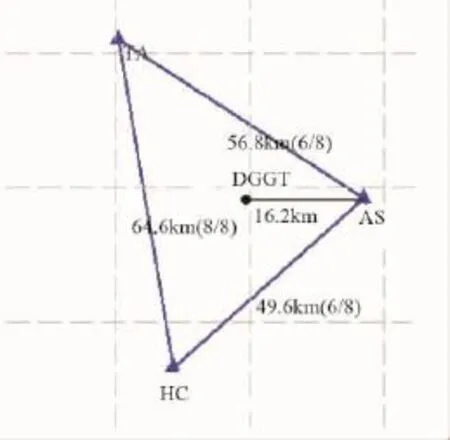
图3 内符合参考站分布

表3 DGGT点测试点数据
ASCORS的内符合数据采集结果如表3所示,精度统计如表4所示,从表中得知平面坐标内符合精度约1cm~3cm,最大值不超过4cm;高程内符合精度约为2cm~4cm,最大值不超过5cm;高程的内符合精度比平面坐标低,集中在2cm~4cm分别占90%和80%,而平面坐标内符合精度主要集中在1cm~3cm,占到90%左右。从结果上还可以看出双频双星接收机与双频接收机RTK采集数据精度没有明显的区别。
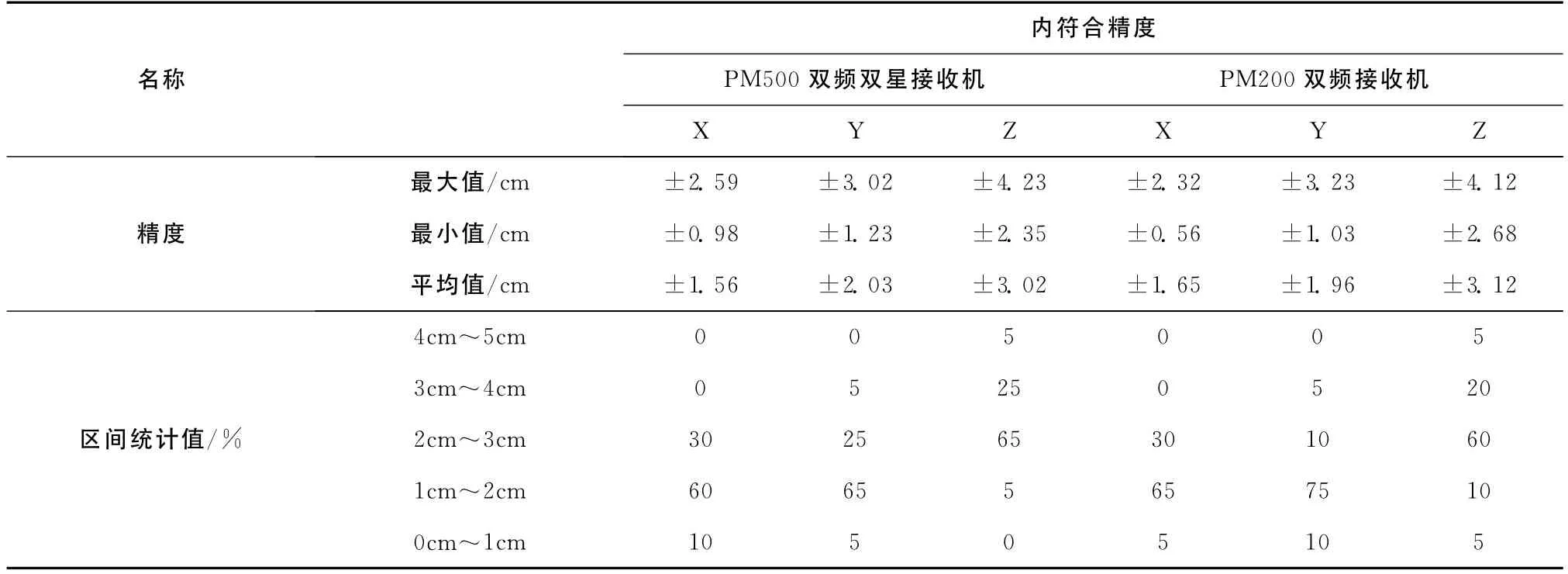
表4 内符合精度统计表
(2)外符合精度分析
外符合精度是评价CORS系统的可靠性与商业可操作性的重要依据,计算外符合精度应用静态已知点检测的方法,将CORS观测值与静态观测的C级已知坐标值进行比较,即可得出各测点的外符合分布情况,再计算系统在x,y,z方向的外符合精度

和内符合精度测试一样,我们同样选择一些点进行分析,如图4:SZ3距离AS站30km,XS距离其45km,两者皆在网内。
而LG点距离AS站25.3km,且为网外。根据ASCORS的组网原则,AS站为SZ3和LG的主站,而HC站为XS的主站。在这三个点上每个点上独立 (每次都重新开机关机初始化)采集数据33次,通过三个站共组成100个测试数据。
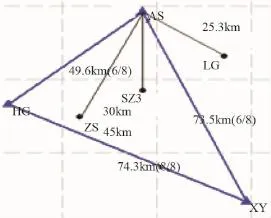
图4 外符合参考站分布图

表5 外符合测试数据
将100个实测值与已知值进行比较,得出每点的差值,即外符合误差如表5所示。ASCORS的外符合精度统计如表6所示,从表6中可知,平面坐标外符合精度控制在2cm~4cm,最大值不超过5cm;高程外符合精度约为2cm~4cm,最大值不超过5cm;系统精度较高,比较稳定。能够满足大比例尺地形图和土地规划的需要。

表6 外符合精度统计表
3.4 内插与外推精度分析
在CORS应用中,由于基准站网大小或者基准站个数的限制,流动站用户作业时的位置可能处于基准站所构成三角形网的外部,相比于在基准站网内部进行几何内插,其外推的定位精度就会有所差异。针对用户这两种不同情况,结合ASCORS,从数据精度的角度出发,详细分析和比较内插和外推流动站综合误差的精度差异。
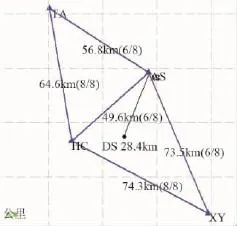
图5 流动站示意图
实验数据来自ASCORS系统,采集时间为2009年11月12号,采样间隔15s,采样2h。在7个基准站观测数据中首先选取AS,XY,HC3个基准站构成的三角形为基准站网,以AS站为主站,分析DS点的内插精度。然后选取AS,HC,TA三个基准站构成三角形,分析DS的外推精度。点DS距离主站AS站28.4km。如图5,我们任意选取一对卫星 (G02、G27),解算出内插和外推的双差综合误差 (如图6、图7)。
从图6可以看出,采用内插算法所内插得到的双差综合误差,其值随历元变化的整体趋势与解算值有一小段偏差量,外推AS-DS综合误差在历元中的走势与解算值相差比较远。
为了更详细比较内插和外推两者精度差异,将实验中内插出的综合误差与和外推的综合误差进行了统计。统计显示,内插方法的差异90%部分在±0.02m,5%的误差超过±0.02m,总体误差在±0.04m以内,而外推形式下的误差超过±0.04m的数量占到了20% ,总体误差在±0.08m以内,容易看出,在构造区域中同一点的综合误差时,内插构造的精度会优于外推时的精度。
所以可以看出,在进行CORS作业时,内插所得的综合误差可以相当准确地反映综合误差变化情况,内插所得的综合误差相比外推更能真实并准确地反映出了误差的变化情况。由此,在建设CORS系统时,在保证基准站之间的距离不能过长和用户定位精度的同时,也要考虑到该系统所能覆盖的网内用户作业范围。

图6 AS-DS内插综合误差 (m)
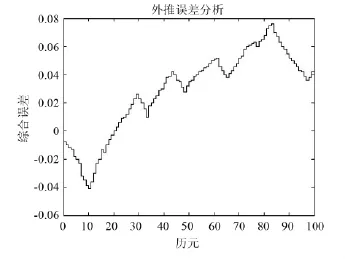
图7 AS-DS的外推综合误差 (m)
3.5 定位稳定性分析
定位稳定性即时间可用性是针对系统提供的CORS实时定位服务而言。它在一定程度上受客观因素的影响,当由于卫星运动、大气变化、系统本身稳定性等原因造成某时刻系统可用卫星数达不到CORS定位服务所需的最少卫星数或者系统本身无法结算时,系统将无法提供有效的网络RTK定位服务。
测试方法:选择一个固定点,利用Z-max双频GPS接收机连续观测24h,以GPRS为通讯方式,采样率1s,采集CORS固定解数据,天顶角设为10°根据应测固定解数与实测固定解数,统计丢失固定解和丢失率,用以统计系统在时间上的可用性,观测完成后统计ASCORS系统可用性为97%。
3.6 兼容性分析
系统的兼容性决定该系统是否能更好的进行商业化以及与不同系统的融合,ASCORS兼容性测试过程中,参加测试的仪器有ASHTECH公司的Z-x,Z-Max,PM500,及国产设备和其他进口GPS设备。测试表明都能得到稳定可靠的固定解,平面精度小于3cm,高程精度小于5cm。
4 结论
(1)ASCORS网络系统采用改进型综合误差参考站技术,基于光纤和ADSL专线网络,低成本通讯技术这一创新方案,大大降低了通讯费用,同时保证了系统的可靠性、稳定性、可用性和高精度。平面平均误差2.1cm,高程平均误差4.6cm。
(2)通过各种方法对系统精度进行测试,结果表明:内符合精度高于外符合精度1cm~2cm,但不成规律分布;同一点位不同时间段所有测试值与已知坐标的差值均在±0.04m范围内,所有测试值坐标分布在±0.01m~±0.05m范围内。
(3)ASCORS系统的空间可用性良好,在初始化分析中,RTK首次初始化约30s;系统数据兼容RTCM2.3,RTCM3.0及CMR/CMR+中任何一种差分改正数据格式。区域内插精度明显高于外推精度,系统RTK的有效工作范围可从网边缘外推至网外30km左右可满足各类工程测量的要求。
[1]刘经南,刘 晖.连续运行卫星定位服务系统-城市空间数据的基础设施[J].武汉大学学报:信息科学版,2003,28(3):259-264.
[2]李 健,吕志平,乔书波.连续运行参考站网的演化与发展趋势[J].测绘科学,2008,33(S3):44-46.
[3]RICHARD A,SNAY T.Continuously Operating Reference Station(CORS):History,Applications and Future Enhancements[J].Journal of Surveying Engineering,2008,134(4):95-104.
[4]吴俐民,丁仁军,陈云波.徕卡主辅站技术在昆明市连续运行GPS参考站系统中的应用[J].测绘通报,2006(9):65-66.
[5]杨 光,方 锋,祁 芳.广州市连续运行卫星定位综合服务系统[J].城市管理与科技,2006(6):253-255.
[6]黄北新,付先国.合肥市 GPS/GLONASS双星连续运行参考站系统性能测试与分析[J].测绘通报,2008(7):7-9.
[7]刘 晖,时晓燕,刘经南,等.深圳市连续运行卫星定位服务系统的建立与试验[J].测绘通报,2003(9):33-36.
[8]陈俊勇,张 鹏,武军郦,等.关于在中国构建全球导航卫星国家级连续运行站系统的思考[J],测绘学报,2007,36(4):366-369.
猜你喜欢
中国火炬(2022年9期)2022-09-13
少儿画王(3-6岁)(2022年6期)2022-07-19
导航定位学报(2022年1期)2022-02-17
科教创新与实践(2021年10期)2021-09-10
辽宁省博物馆馆刊(2020年0期)2020-08-13
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
电子制作(2019年24期)2019-02-23
电子制作(2018年19期)2018-11-14
雷达学报(2017年1期)2017-05-17
