基于PSO算法角接触球轴承动态接触角的求解
2013-07-21 01:51王连宝胡小秋芮红锋
轴承 2013年11期
王连宝,胡小秋,芮红锋
(南京理工大学 机械工程学院,南京 210094)
高档数控机床的进给系统必须具有良好的动态特性[1]。角接触球轴承是进给系统普遍使用的支承轴承,其动态特性直接影响进给系统的整体性能。如今,角接触球轴承的动态特性分析理论已经比较完善,主要的难点集中在轴承动态模型的求解方面,目前多选用Newton-Raphson法、Hook-Jeeve法和差分法等[2-4]。上述方法对迭代初值敏感,求解不易收敛[5]。与之相比,二次插值型粒子群优化(Particle Swarm Optimization, PSO)算法对边界初值的设定没有严格的要求,具有很好的全局寻优能力。
1 轴承动态特性分析的简化模型
1.1 几何相容方程
对于内圈转动、外圈固定的角接触球轴承,受到联合载荷(轴向力Fa和径向力Fr)作用前后位于角位置ψj处的球心与内、外沟曲率中心的相对位置关系如图1所示。根据图1的变形几何条件得

图1 球心与内、外沟曲率中心的位置关系
(1)
(2)
式中:fi,fe分别为内、外沟曲率系数;δij,δej分别为内、外沟道的法向接触变形量;Dw为球直径;Kij,Kej分别为内、外沟道的接触刚度;Qij,Qej分别为内、外沟道的法向接触载荷;xaj,xrj,A′aj,A′rj为与球心和内、外沟曲率中心坐标相关的变量;j=1,2,…,Z;Z为球数。
1.2 内圈力平衡方程
在Fa和Fr作用下,轴承处于受力平衡状态,对内圈有
(3)
(4)
式中:αij,αej分别为内、外接触角。
1.3 动态模型简化前、后的比较
文献[2,5-6]中的动态模型包含一系列辅助方程和4Z+2个主方程,主变量较多且彼此耦合,增加了算法的复杂性,也降低了计算精度,需要对动态模型的主方程组进行简化并寻找新的算法。
与以往的动态模型相比,简化模型中增加了2Z个辅助方程,主方程数目减为2Z+2个,缩减了主变量个数,简化了适应度函数Fitness。
2 求解方法及流程
简化模型中变量Kij,Kej,Qij,Qej,δij,δej,xrj,xaj,A′rj和A′aj最终都是关于αij与αej的函数,其逻辑关系如图2所示。
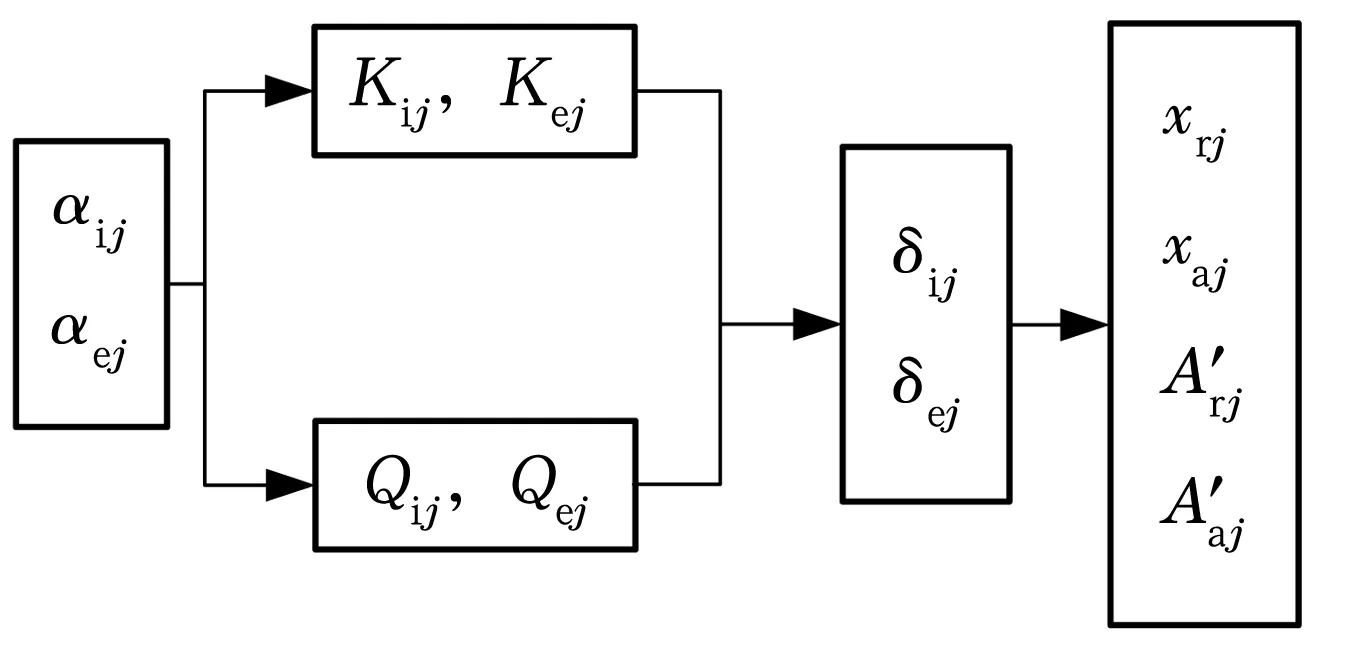
图2 变量之间的逻辑关系
取一组接触角αij与αej为粒子元素,适应度函数Fitness由 (1) ~ (4) 式左边表达式组成,即
|Expr3|+|Expr4|,
当轴承转速不为零时,每个球受到离心力和陀螺力矩的作用,接触角按一定规律变化。研究表明,在一定的外加载荷作用下,随着转速的升高,内接触角逐渐增大,外接触角逐渐减小,且内接触角大于外接触角。所以,在算法中设定约束条件为αej<αij。仿真表明:根据变量的实际意义确定未知量的约束条件,既提高了计算精度,又缩短了收敛时间。
PSO算法具有求解优化问题的能力,但在处理复杂、多维变量多峰值的数学模型时仍然存在“早熟收敛”现象[6],使得计算精度较低。为了改善这一问题,文中采用二次插值型PSO算法,该算法引入了基于二次插值的“早熟判断和处理”机制,算法在出现粒子早熟时会跳出局部最优,所以具有很好的全局优化和局部探索能力。角接触球轴承简化模型动态接触角的计算流程如图3所示。
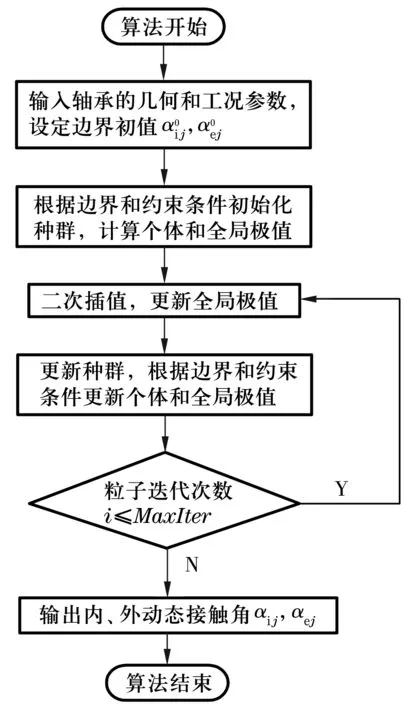
图3 动态接触角的计算流程
3 计算结果与分析
为了验证简化模型的正确性和二次插值PSO算法程序的可行性与普适性,选择常规轴承SKF B218和高精密轴承SNFA VEX 6/NS为例,同时为了与已知文献[7-8]对比,下面仅计算轴承在不同轴向力和转速下的动态接触角。
3.1 SKF B218的分析
SKF B218的内、外圈与钢球材料均为GCr15钢,主要参数见表1。

表1 SKF B218主要参数
3.1.1 动态简化模型和算法的验证
当轴向力Fa=17.8 kN,转速n取不同数值时,内、外接触角的计算值与文献值[7-8]见表2。由表2可以看出,低速时内、外接触角的计算结果与文献值之间的相对误差很小,在±0.21%以内;随着转速的升高,计算误差略微增大,但仍然较低,基本上在±1.09%以内。这是因为在轴承转速较低时,实际内、外接触角的差值较小,程序可以设定较小范围(上、下边界初值的差较小)的接触角边界初值;而高速时,实际内、外接触角的差值增大,需要设定较大范围的边界初值,致使计算误差也偏大。

表2 计算值与文献值的对比结果
图4给出了轴承转速n=15 000 r/min,轴向力Fa取不同值时内、外接触角的文献值与计算值变化曲线。由图4可知,内、外接触角的计算值分别与对应的文献值变化趋势相一致;当轴向力较小时,内、外接触角的计算误差相对较大,达到±2.56%;随着轴向力的增大,计算误差减小,低至±0.31%。这是因为随着轴向力的增大,内接触角逐渐减小,外接触角逐渐增大,两者之间的差值呈现递减的变化趋势,所以当轴向力较大时可以设定较小范围的边界初值,降低计算误差。
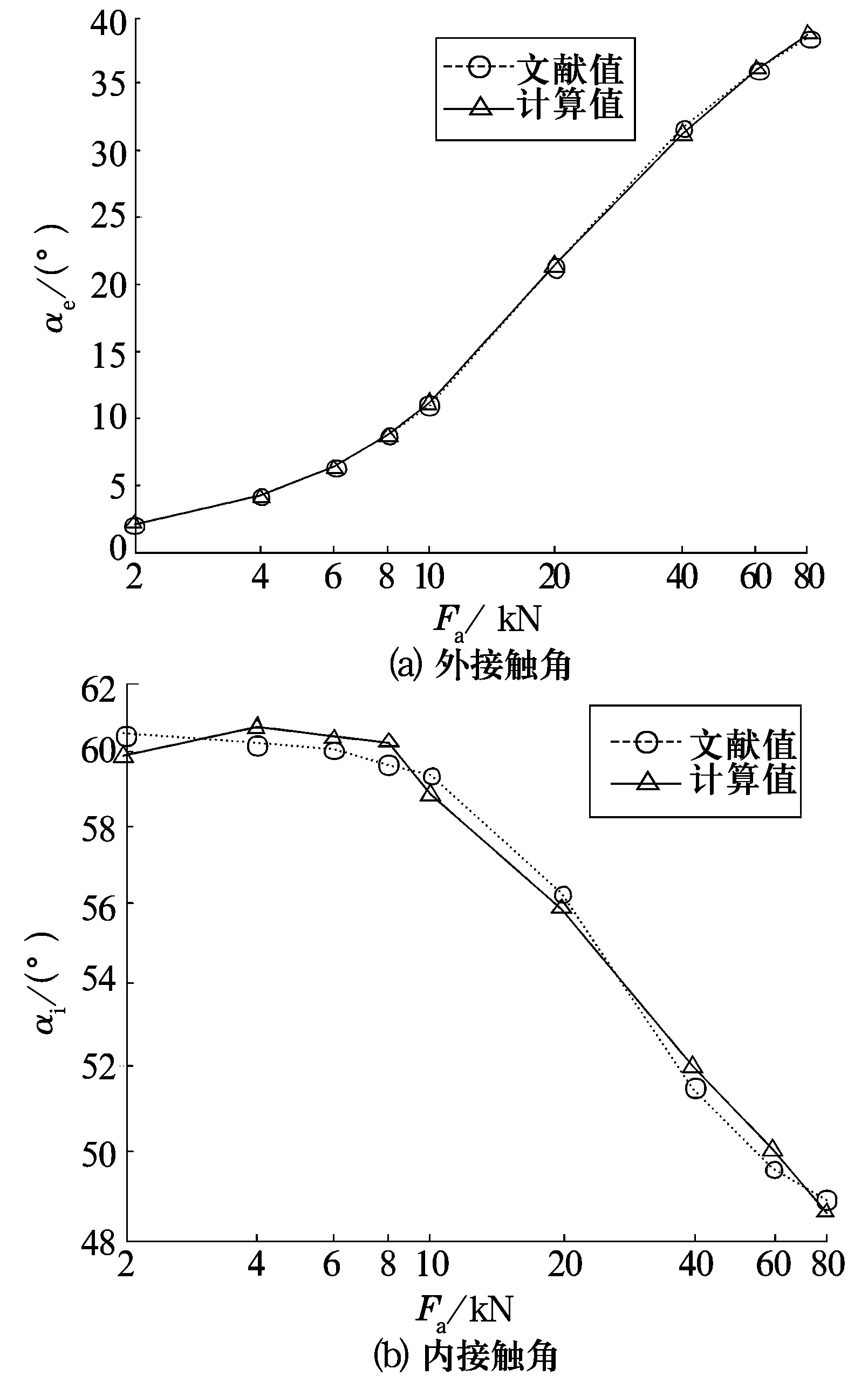
图4 轴承动态接触角随轴向力的变化曲线
3.1.2 边界初值对计算结果的影响
轴承所受轴向力Fa=10 kN,转速n=5 000 r/min工况下,内、外接触角分别选定不同的边界初值时的计算结果见表3。由表3可以看出,随着边界初值设定范围的扩大,内、外接触角的计算结果没有一定的变化趋势,这是由于PSO算法中初始化种群具有随机性;并且,计算结果分别在[42.38°,43.45°],[38.90°,40.13°]内微幅震荡,说明了此算法和程序具有很好的稳定性,边界初值对计算结果影响很小。

表3 不同初值下的计算结果(SKF B218) (°)
3.2 SNFA VEX 6/NS的分析
SNFA VEX 6/NS是一种高精密的高速混合陶瓷球轴承,尺寸较小,其套圈材料为GCr15钢,陶瓷球材料为Si3N4,主要参数见表4。

表4 SNFA VEX 6/NS的主要参数
当轴承转速n=1.0×105r/min,轴向力Fa取不同数值时的文献值[8]和计算值曲线如图5所示。由图5可知,内、外接触角的计算误差均在±4.31%以内,说明此算法对高精密轴承同样具有较高的计算精度。

图5 轴承动态接触角随轴向力的变化曲线
轴承在轴向力Fa=50 N,转速n=1.0×105r/min工况下,内、外接触角分别选定不同的边界初值时的计算结果见表5。

表5 不同初值下的计算结果(SNFA VEX 6/NS) (°)
由表5可以看出,内、外接触角的计算结果分别在[19.79°,20.72°],[14.28°,15.27°]内小幅波动,说明了设定较大范围的边界初值对高精密轴承的计算结果影响不大,即上文算法适用于高精密轴承。
4 结论
(1)当轴向力一定时,随着转速的增大,内、外接触角的计算误差呈现递增的变化趋势;当转速一定时,随着轴向力的增大,计算误差呈现递减的变化趋势。
(2)在轴向力、转速变动范围较大时,内、外接触角的计算误差小,说明提出的角接触球轴承动态简化模型具有较高的正确性,应用二次插值型PSO算法进行求解具有很好的可行性与普适性。
(3)当轴向力、转速一定时,内、外接触角设定不同的边界初值范围,其计算结果均在较小区间内变动,说明该算法对动态简化模型的边界初值敏感性较低,具有很好的稳定性,适用于计算常规轴承和高精密轴承。
猜你喜欢
数学物理学报(2022年1期)2022-03-16
空间科学学报(2020年1期)2021-01-14
甘肃科技(2020年20期)2020-04-13
数学年刊A辑(中文版)(2018年2期)2019-01-08
科技风(2018年3期)2018-05-14
科技风(2018年2期)2018-05-14
小天使·三年级语数英综合(2017年6期)2017-06-07
建材发展导向(2014年6期)2014-11-24
火炸药学报(2014年3期)2014-03-20
东北师大学报(自然科学版)(2014年1期)2014-02-27