变系数加权误差函数的判决反馈盲均衡算法
2013-07-20 02:34周巧喜郭业才
计算机工程与应用 2013年24期
周巧喜,郭业才
1.安徽理工大学电气与信息工程学院,安徽淮南 232001
2.南京信息工程大学电子与信息工程学院,南京 210044
变系数加权误差函数的判决反馈盲均衡算法
周巧喜1,郭业才2
1.安徽理工大学电气与信息工程学院,安徽淮南 232001
2.南京信息工程大学电子与信息工程学院,南京 210044
1 引言
水下通信系统中,带宽受限和多径传播引起的码间干扰(ISI)是影响通信质量的一个重要因素,需要有效的信道均衡技术来消除。目前,在不需要训练序列的盲均衡算法中,线性均衡算法结构简单、性能稳定,但只适用于干扰不太严重的水声信道均衡[1-2]。判决反馈均衡器(DFE)由于反馈滤波器部件具有非线性特性,可以补偿具有深谱零点的水声信道[3-6],在信道选择性衰落较为严重时具有良好的性能,被广泛使用。然而同线性均衡算法固有的缺陷一样,非线性均衡算法也通常采用LMS准则进行迭代,误差函数是均衡器权向量更新因子的一部分[7-8]。误差函数不同,所得均衡器的权向量不同,进而所得均衡器的性能也不同。因此,误差函数的形式和特点对算法的性能有着重要的影响。
由误差函数的特性可知,误差函数的不对称性和不可调性是导致收敛速度慢和稳态误差大的主要原因之一。针对这种情况,关于误差函数的改进在文献[9-10]中都给出了具体的改进方法,改进后的算法均衡效果都很好。但是它们的改进,前者是针对的某一种误差函数,后者是构造了一种新误差函数。但是,对于各种形式的误差函数,若都改进为奇对称形式以提高均衡的性能,则改进后的函数形式比较繁琐,迭代过程也较复杂。
因此,本文在分析DFE结构以及几种常用误差函数特点的基础上,提出了基于变系数加权误差函数的判决反馈盲均衡算法。该算法可以改进各种误差函数,提高它们的均衡效果,理论分析和仿真实验证明了上述新误差函数的有效性。
2 基于传统误差函数的判决反馈盲均衡算法
2.1 判决反馈均衡器系统模型
判决反馈滤波器一般包括两个滤波器:前馈横向滤波器和反馈横向滤波器。前馈滤波器直接以信道的输出作为输入;而反馈滤波器则以均衡器本身的判决信号作为输入,这个滤波器的输出被用以抵消来自前面符号的部分干扰[11]。判决反馈均衡器的结构,如图1所示。其中,a(k)是发射信号序列,c(k)是信道的冲激响应,n(k)是高斯白噪声序列,y(k)是信道的输出,f(k)和b(k)分别是前馈横向滤波器和反馈横向滤波器的抽头系数,长度分别为Nf和Nb,z(k)为均衡器的输出,aˆ(k)是判决器Q(·)对z(k)的判决信号。

图1 具有DFE结构的盲均衡原理
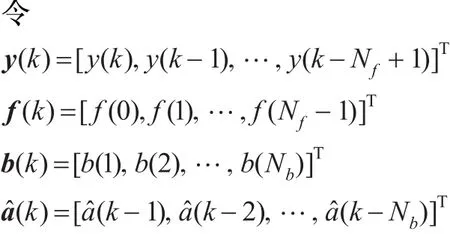
其中,“T”表示转置,则判决反馈均衡器的判决器输入为:

式(1)中,*表示共轭,“H”表示共轭转置。
2.2 算法介绍
DFE系统采用应用最广泛的盲均衡算法——常数模算法[12](CMA)进行均衡。

CMA的代价函数定义为:其中,R2=E{|a(k)|4}/E{|a(k)|2},表示发射序列a(k)的模。各种误差函数曲线,如图2所示(设采用的发射序列是4QAM信号,R=)。
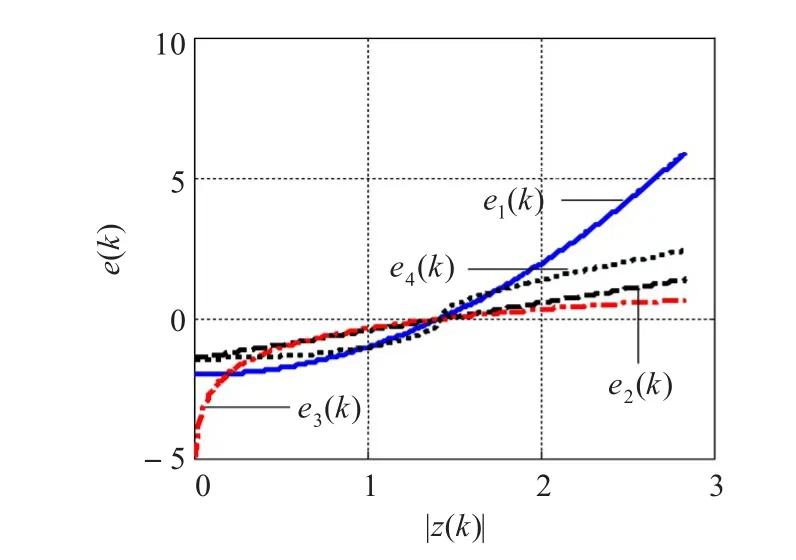
图2 几种常用传统误差函数的曲线图
图2表明,当e1(k)远远大于常数模R值时,这时e1(k)是一个较大的正值。由梯度下降法可知,迭代公式中含有e1(k),所以在自适应过程的开始收敛速度比较快,而当接近收敛点时,对于大小相等符号相反的幅度偏差,误差函数却不能提供相同的补偿。这种不对称性,使得接近收敛点时,收敛速度比起始阶段慢。e2(k)关于零误差点(R,0)对称,在接近收敛点时,误差函数可以提供相同的补偿。这种对称性,使系统获得较好的性能,但是它的收敛速度慢。e3(k)在接近收敛点时,与e2(k)具有类似的特点,但初始收敛速度比e2(k)慢。e4(k)是为了避免对噪声的敏感性设计的,而且当它远远大于常数模R值时,提供了比e2(k)和e3(k)更大的初始收敛速率。然而,在收敛点附近,e4(k)的误差值比其他三种都大,因此,系统获得的性能较差。由此可以看出,误差值越大,收敛越快,但均衡性能差,反之亦然。
把四种常用误差函数代入式(4)和式(3)中,可得其迭代公式为:

式中,gc(k)为误差函数项。对应于每一种误差函数的误差项见表1所示。不同的盲均衡算法在于不同的gc(k),由于对应于四种类型的gc(k)项是各不相同的,因此不同误差函数设计的均衡器性能也不同。
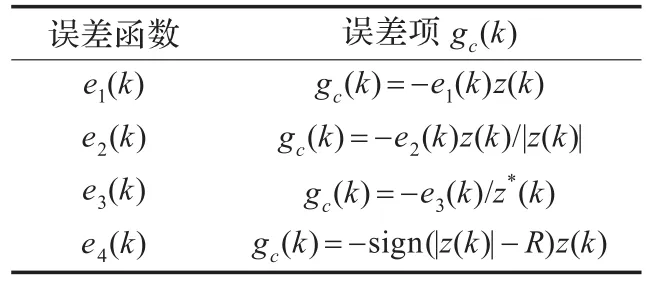
表1 对应于几种常用传统误差函数的误差项
3 基于变系数加权误差函数的判决反馈盲均衡算法
3.1 变系数加权误差函数的推导
由各类误差函数的特性可知,迭代初期的ei(k)(i=1、 2、3、4)数值愈大,则收敛速度愈快;而当接近收敛点时,ei(k)数值愈小,则可以获得更好的稳态误差。因此,把以上的优点进行结合,误差函数进行分段处理。即,在迭代初期,用一个数值大于1的系数对误差函数进行加权,使误差值始终保持比原来的误差值大,即进一步加快收敛速度;而对于接近收敛点时,用一个数值小于1的系数加权,使误差值变得更小,以获得较好的均衡效果。而且,这两个系数都要随着迭代的进行(即迭代次数的增加)而逐渐变小,以使误差值随着迭代的进行而逐步减小。由于系数的数值一直在变化,所以称之为变系数。基于这种思想对前文所述四种常用的误差函数进行改进,且零误差点(R,0)仍然保持不变,则变系数加权后的ei(k)(记为evi(k))统一用式(10)表示。

由于改进的误差函数比常模误差函数多了一个变系数,所以把evi(k)称为变系数加权误差函数。把四种常用的误差函数代入式(10),就可得到四种变系数加权误差函数。
3.2 变系数加权误差函数的性能分析
由函数的推导过程可知,渐变因子只是起到使误差值逐渐减小的作用,真正控制均衡效果的因素是何时切换lk,以及切换前后它的数值大小如何。即,突变因子取值的大小和切换点位置如何,是决定算法性能优劣的主要因素。因此,应从这两方面进行性能分析。
(1)切换点
切换点的位置是决定改善收敛速度还是稳态误差的分界点。如果过早切换,则收敛速度提高不多,稳态误差会有所改善;切换过迟,则收敛速度提高较快,但稳态误差可能会增大。所以,要综合考虑收敛速度和均方误差这两个方面,以确定何时进行切换。
(2)突变因子的取值
突变因子的数值大小直接影响着收敛速度的提高和均方误差的改进程度,下面从梯度范数的角度来证明。
从随机梯度下降法得知,算法梯度范数的大小反映了算法收敛速度的快慢以及在“碗底”来回振荡的幅度(稳态误差)的大小。梯度范数越大则收敛越快,误差越大;反之,收敛慢,误差小。由于变系数加权误差函数是在常模误差函数的基础上改进的,从两者的权迭代公式很容易得知,两者的梯度范数之比为一比例系数,如式(11)。
式(13)表明,与常模误差函数相比,此时新误差函数具有较快的收敛速度,但稳态误差也较大。
当lk取较小的数值k2,使

式(15)表明,此时新误差函数与原常模误差函数相比,具有较小的稳态误差,但收敛速度变慢了。
以上证明了lk取值较大k1和较小k2处算法的收敛特性,现证明lk介于这两者之间时新算法的收敛特性随lk值变化的规律。
式(16)表明,变系数加权误差函数梯度范数的大小是关于lk值的增函数,所以在区间[k1,k2]内也总会存在一个数值,使

式中,k0是lk发生突变时的迭代次数。此时,收敛速度先加快,后变慢,均衡的效果可能会比原来好一点。但这并不能保证收敛速度提高的同时,均方误差一定不会增加;反之亦然。由于对数是缓慢变化的,所以很难做到两者的兼顾。若lk大小有所变化,即起始阶段取较大数值,而接近收敛点时取较小值,这样容易满足迭代初期的快速收敛和接近收敛点时的均方误差不会增大。因此,增加一个突变因子可以更好地调节均衡的进度。
通过上述分析可知,对于特定的信道,通过改变lk的大小和移动切换点可以找到合适的误差函数,用于信道均衡。选取较大的lk值或切换过迟可以加快算法的收敛速度,切换过早或较小的lk值可以减小算法的稳态误差。在实际应用中,可采用以下调节方法:若着眼于算法收敛速度的提高,则切换时刻可以较晚些,且切换后的lk值较小以确保均方误差不增大;若着眼于算法稳态误差的减小,则切换时可以较早一些,首先满足收敛速度的要求,且切换后选用比前一种情况更小的lk,使均方误差进一步减小。另外,这两种情况都要求切换前取较大的lk数值。总之,要联合调整切换点位置和突变因子的大小,才能取得更好的均衡效果。
3.3 VCMDFE的权迭代公式
利用随机梯度下降法,可得:
把常用的四种误差函数式代入式(18),可得变系数误差函数的DFE权迭代公式为:

3.4 VCMDFE的运算量分析
由权迭代公式(19)可知,与CMDFE算法相比,VCMDFE算法只是增加了一个变系数。由于lk和g均为常数,因此,VCMDFE算法在每次权迭代时需要增加一次对数运算和一次实数乘法运算。因此,VCMDFE的计算量增加不多。
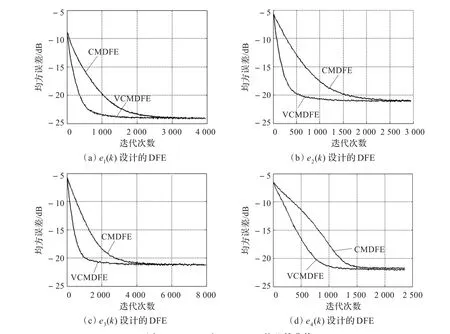
图3 CMDFE和VCMDFE的收敛曲线
4 仿真研究
在实验参数相同的条件下,均采用深谱零点的水声信道对CMDFE和VCMDFE算法的性能进行仿真分析。其中,实验4采用文献[14]的信道为:c= [0.313 2-0.104 00.890 80.313 4]其余实验均采用文献[15]中的信道c=[100.3e-0.7i000.2e-0.8i]。仿真中,信噪比为25 dB,迭代步长取0.001,DFE的前馈滤波器长度为Nf=33,反馈滤波器长度Nb=8,前馈滤波器的权系数采用中心抽头初始化的方法,反馈滤波器的抽头系数均初始化为全零值。
实验1比较由误差函数e1(k)和ev1(k)设计的均衡器性能。其中,信源采用功率归一化的4QAM信号,lk在迭代次数为600处由18.75切换为8.25。此时,可变因子从1.69切换到1.12。仿真结果如图3(a)所示。
实验2比较由误差函数e2(k)和ev2(k)设计的均衡器性能。其中,信源采用非归一化的4QAM信号,lk在迭代次数为550处由25切换为7.87。此时,可变因子由1.96变为1.10。仿真结果如图3(b)所示。
实验3比较由误差函数e3(k)和ev3(k)设计的均衡器性能。其中,信源采用非归一化的4QAM信号,lk在迭代次数为1 000处由18.75切换为8.75。此时,可变因子由1.63变为1.11。仿真结果如图3(c)所示。
实验4比较由误差函数e4(k)和ev4(k)设计的均衡器性能。其中,信源采用功率归一化的4QAM信号,lk在迭代次数为320处由18.75切换为6.25。此时,可变因子从1.76变为1.02。仿真结果如图3(d)所示。
图3为同一误差函数下CMDFE和VCMDFE的收敛曲线。该图表明,与CMDFE算法相比,VCMDFE算法不同程度地提高了收敛速度或者减小了均方误差。其中,图3(a)~图3(c)的收敛速度均提高了1至2倍,而均方误差基本没变;图3(d)的收敛速度虽然提高的程度最小,但均方误差减小的程度最大。
以上四种实验的仿真结果表明,对于不同传统的误差函数,VCMDFE算法既可以加快收敛速度,又减少了稳态误差,有效实现了信道的均衡。
另外,上面四个实验中VCMDFE加快收敛速度的程度有所不同。图3表明,前三者收敛速度的提高程度较高,而最后一个最小。这是由于前三者的切换较晚,充分发挥了收敛速度的提高。而最后一个的切换过早,没有充分加快收敛速度,但均方误差改善了。因此,在信道均衡中,切换点位置的选取,要综合考虑均方误差和收敛速度两方面的性能。
5 结束语
本文通过分析常用误差函数的特点,构造了一种新的误差函数,即变系数加权误差函数,并提出了基于该误差函数的判决反馈盲均衡算法。在新算法收敛过程中,由突变因子控制误差数值的大小,即新误差函数具有可调性。与CMDFE相比,VCMDFE增加的计算量很小,并且具有更快的收敛速度和更小的稳态误差。因此,具有很强的实用价值。计算机仿真证明了该切换方法的有效性。
[1]郭业才.基于统计特性均衡准则的线性符号判决反馈盲均衡算法[J].系统仿真学报,2007,19(11):2413-2417.
[2]梁华庆,徐开辉.判决反馈自适应均衡技术在水声数据传输系统中的应用[J].声学技术,2004,23(1):8-10.
[3]郭业才,杨超.基于正交小波包变换的判决反馈盲均衡算法[J].系统仿真学报,2010,22(3):570-572.
[4]郭业才,林仁刚.基于T/4分数间隔的判决反馈盲均衡算法[J].数据采集与处理,2008,23(3):284-287.
[5]周巧喜,郭业才.基于不同误差函数的判决反馈水声信道盲均衡算法[J].舰船科学技术,2007,29(6):52-55.
[6]周巧喜,杜锋.基于加权判决信号的判决反馈盲均衡新算法[J].科技情报开发与经济,2007,17(32):158-159.
[7]郭业才.自适应盲均衡技术[M].合肥:合肥工业大学出版社,2007.
[8]Zhou Qiaoxi,Guo Yecai.Constant modulus algorithm based on error functions weighted by variable coefficient[C]//2011 International Conference on Mechanical Materials and Manufacturing Engineering,ICMMME 2011,2011:1579-1585.
[9]饶伟.Bussgang类盲均衡算法的扩展研究[D].淮南:安徽理工大学,2007.
[10]郭业才,韩迎鸽.基于对数正态误差函数的变步长均衡新算法[J].系统仿真学报,2007,19(6):1224-1227.
[11]周巧喜.基于不同误差函数的判决反馈盲均衡算法研究[D].淮南:安徽理工大学,2008.
[12]Godard D N.Self-recovering equalization and carrier tracking in two dimensional data communication system[J].IEEE Transactions on Communications,1980,28(11):1867-1875.
[13]Guo Yecai,Han Yingge,Rao Wei.Blind equalization algorithms based on different error equations with exponential variable step size[C]//ISTAI’2006,2006:497-501.
[14]杨超,郭业才.基于正交小波包变换的水声信道盲均衡算法[J].系统仿真学报,2009,21(22):7225-7228.
[15]王峰.基于高阶统计量的水声信道盲均衡理论与算法[D].西安:西北工业大学,2003.
ZHOU Qiaoxi1,GUO Yecai2
1.College of Electrical and Information Engineering,Anhui University of Science and Technology,Huainan,Anhui 232001,China
2.School of Electronic and Information Engineering,Nanjing University of Information Science and Technology,Nanjing 210044,China
For overcoming effect of the underwater acoustic channel on communication quality,a new style of error function weighted by a variable coefficient is proposed,on the basis of analyzing the feature of the usual traditional error functions and Decision Feedback Equalizer(DFE).And a new blind decision feedback equalization algorithm(VCMDFE)based on the new error function is proposed too.In this proposed VCMDFE algorithm,the variable coefficient can adjust the value of the error function according to the progress of equalization,so as to have faster convergence rate and lower residual error than CMDFE. The efficiency of the proposed VCMDFE algorithm is proven by computer simulation with underwater acoustic channels.
variable weighted coefficient;error function;decision feedback
针对严重失真的水声信道,在分析几种常用传统误差函数和判决反馈均衡器(DFE)的基础上,构造了一种变系数加权误差函数,对DFE权向量进行更新,提出了基于变系数加权误差函数的判决反馈盲均衡算法(VCMDFE)。与基于传统误差函数的判决反馈盲均衡算法(CMDFE)相比,新算法能够根据均衡的进度,利用一变系数去调节误差函数数值的大小,以取得比CMDFE算法更快的收敛速度和更低的稳态误差。水声信道的仿真结果验证了该算法的有效性。
变系数;误差函数;判决反馈
A
TN911.7
10.3778/j.issn.1002-8331.1211-0067
ZHOU Qiaoxi,GUO Yecai.Decision feedback blind algorithm based on error function with variable weighted coefficient. Computer Engineering and Applications,2013,49(24):200-204.
全国优秀博士学位论文作者专项基金资助项目(No.200753);安徽理工大学青年教师科学研究基金资助项目(No.2012QNY25)。
周巧喜(1979—),女,讲师,研究领域为智能信号处理、小波变换;郭业才(1962—),男,博士,教授,研究领域为水声信号处理、高阶谱分析和系统仿真。E-mail:qxzhou@aust.edu.cn
2012-11-06
2013-01-08
1002-8331(2013)24-0200-05
CNKI出版日期:2013-02-20http://www.cnki.net/kcms/detail/11.2127.TP.20130220.1611.012.html
猜你喜欢
大电机技术(2022年3期)2022-08-06
核科学与工程(2021年4期)2022-01-12
煤气与热力(2021年4期)2021-06-09
中华戏曲(2020年1期)2020-02-12
电子制作(2019年11期)2019-07-04
电子制作(2018年16期)2018-09-26
系统工程与电子技术(2016年7期)2016-08-21
火控雷达技术(2016年2期)2016-02-06
电子器件(2015年5期)2015-12-29
电源技术(2015年1期)2015-08-22