汽车驾驶员视觉注意特性及信息处理结构模型的构建
2013-07-19 01:57胡科伟夏如艇林文君余琳琳倪莹莹
中国科技信息 2013年21期
胡科伟 夏如艇 林文君 余琳琳 倪莹莹
台州学院机械工程学院, 浙江 台州 318000
前言
汽车驾驶是依据交通环境信息作出视觉感知、目标判断和车辆操作的过程,道路交通系统是人、车辆和环境三要素构成的复杂系统。驾驶过程中若驾驶员的视觉适应能力、感知及判断能力下降,将可能引发安全事故。尽管引发事故的因素有很大,如, 驾驶违章、气候条件、车速、道路条件等,但视觉感知与目标判断的正确与否是重要原因之一。驾驶员是一个复杂的主观个体,能依据先验知识作出判断和操作,是交通系统的核心,在协调和控制交通系统中起主导作用并决定其性能。车辆是由人驾驶的是客观无意识的。交通系统中的感知信息,包括行驶车辆的形状与颜色、道路宽窄与车道数量信息、路面标识与标志,驾驶员生理心理感知变化等是根据驾驶员自身的主动视觉特性进行及时的并行处理。因此,对于驾驶过程中的人车环三要素构成的交通系统模型的构建需要深入研究,在分析驾驶员动态视觉行为特性的基础上,对驾驶员的视觉处理信息的过程进行详细分析,深入揭示其内在的相关性并采用系统模型的方式研究模型的构成要素及其规律性。本文基于对人、车辆和环境的交通系统各要素的分析,应用认知心理学理论,尝试对驾驶员的视觉信息获取方式与获取顺序以及目标的判断和车辆操作过程中的视觉信息处理机制进行了深入研究,构建了车辆驾驶者对视觉感知目标对象的交通信息处理结构模型,运用并行处理法对模型的结构特点进行了分析。
1 驾驶员视觉适应性
1.1 静视力与动视力
静视力是指被试者和视标在静态状况下的视觉感知能力,即,静视力。静视力主要是采用视认距离判断静视力的强弱。国内在检测驾驶员的静视力能力时通常采用E型视力表进行评定。静视力的评定时要求检测被试驾驶员的双眼视力,然后对双眼视力进行综合评定,此种视力称为中心视力。被试驾驶员在测试时,被试者与视力表的距离为5m,依据周围环境照明条件,一般以照度为200±100lx (勒克斯)为测试照度,测试后按照国家相关规定,判定被试者的两眼视力(含正常矫正视力)在0.7以上时,被试者才被允许获得参加驾驶许可证的报考。这种检测方法基本能反映和评定驾驶员在静止状态下的视觉感知能力,并以此静视力值作为驾驶员的基本要求。
动视力是指被试者和视标在动态状况下的视觉感知能力,即,动视力。驾驶员在驾驶过程中的视觉能力主要是动视力起作用。动视力主要是采用目标跟踪法评定动视力。当目标出现时对动态目标的速度、位置和路径作出反应,测量其反应时间。研究结果表明,驾驶员的动视力是随驾驶车辆的速度变化而发生变化的,车辆速度高时反应时间长,反之,则反应时间短。通常情况下,驾驶员的动视力比静视力低。例如,当车辆以60km/h的车速行驶时,驾驶员能识辩前方标志标识的距离约为240m;但当车速为80km/h,识辩距离明显下降。许多研究表明,驾驶员的动视力与车辆安全事故有很大关系,因此,在进行驾驶员的视觉功能检查时,既要检查其静态视觉功能也要检查动态视觉功能。
1.2 夜间视力与环境照度视力与环境照度有关,照度增加可提高对目标的识辨能力。在照度为0.1-100m烛光的范围内,两者呈线性关系。通常来说,夜间环境状况下的照度较低,易导致驾驶员的视觉判断能力下降,表现出夜间低视力,称为夜近视。大量的研究表明,在黄昏和照度较低的夜间状况下,安全交通事故与低照度的夜间环境有直接关系,驾驶员在黄昏和夜间的静视力和动视力都有所下降。
1.3 视觉选择性注意与交通环境驾驶员依据眼睛获得的视觉信息进行加工和解释,从而对目标对象作出判断是驾驶过程中的主要任务。驾驶过程中,驾驶员的视觉注意频繁的在前方物体间转移,根据目标的信息特征(颜色、位置和形状等)有选择性的对目标作出反应。选择性注意与环境因素有很大关系,直接受环境照度,车辆速度,目标亮度及位置和形状等因素的直接影响。
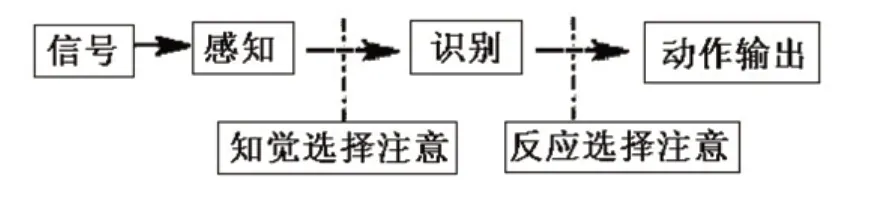
2 驾驶员的信息处理方式
认知心理学认为驾驶员的视觉信息处理方式有两种。一种处理方式是,驾驶员的认知过程作为串行的信息处理过程,即第一阶段信息处理完后就进入下一阶段,即只受目标所影响的处理方式;另一种处理方式是既受目标的影响,还受驾驶经验和先验知识的影响,采用并行处理方式。因此,驾驶员的信息处理方式可以归结如下:
3 交通系统信息处理结构
交通系统中的信息处理主要由该系统中的各种因素所决定,如车辆的舒适性和平顺性、交通道路的路面状况、交通环境中的标志标识的视认性、环境照度与目标亮度及驾驶员的视觉生理与视觉心理等各种因素。因此,在分析系统的信息处理结构时应该将人、车辆、道路和环境等因素纳入系统中的处理对象,进行全面综合的考虑, 对系统中各因素之间的相互联系进行比较和评价,在对各因素比较评价的基础上评定整个交通系统的性能。因此,交通系统的结构模型如下:

作为影响驾驶员输入信息的有交通标志标识信息、道路状况信息、驾驶员视觉特性信息、环境照度信息、车辆状况信息及监控系统信息等。各种信息之间存在相互联系和相互影响,进入驾驶员信息处理方式后,经驾驶员动态特性分析得到控制车辆行驶的决策,并通过系统协调执行系统决策。驾驶员依据驾驶实际经验和先验知识的调整,考虑外界环境因素的影响之后, 利用各控制模块对车辆和视觉信息进行控制操作, 并将系统信息的决策行为反映到车辆模型之中,这样就可改变驾驶员操纵车辆的行驶轨迹和行驶方向等。在这个阶段完成之后,系统重新进行自适应的调整再对车辆行驶参数进行自适应的改变,然后又将重新将新的信息数据反馈到驾驶员的操作之中,为下一步系统的决策和执行做好准备。
4 驾驶员信息并行处理结构模型的构建
应用上述驾驶员的视觉感知、注意和记忆功能等视觉注意机制,通过对驾驶员自身生理和心理因素综合调查以及对驾驶员视觉适应性的分析,得出在动态状况下驾驶员在复杂的交通环境状况下准确的进行并行处理交通信息的结构模型,即,信息并行处理结构模型。在执行驾驶任务的过程中,驾驶员自身的生理心理因素以及视认目标对象,如,交通标识等, 均被安排在行驶过程中的交通系统综合环境之中。该模型包括的主要功能有:并行信息处理的判断决策模块,环境信息获取模块,驾驶操作执行模块,信息输出模块以及驾驶员视觉适应性和视觉注意特性及自身处理交通信息的性格、偏好等特征的约束模块。因此,驾驶员在正常条件下行驶时,交通信息加工过程进行按上述方式进行。
5 总结
(1)对驾驶员的静视力与动视力,夜间视力与环境照度,及选择性注意与交通环境进行了分析。基于驾驶员的信息处理方式和交通系统结构模型构建了驾驶员信息处理结构模型。
(2)驾驶员信息处理结构模型为驾驶员协同仿真模型的实现奠定了理论基础。
[1]王彦亭,赵爱国. 我国道路交通安全发展情景分析[J]. 中国安全科学学报,2005,15(1):43-46.
[2]魏宏业,张仲义,吕永波. 促进我国道路交通安全建设策略的探讨[J]. 中国安全科学学报,2003,13(6):68-71.
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
中国石油大学胜利学院学报(2022年1期)2022-04-21
汽车实用技术(2022年7期)2022-04-20
汽车实用技术(2022年4期)2022-03-07
建材发展导向(2021年13期)2021-07-28
铁道通信信号(2018年11期)2019-01-19
照明工程学报(2018年3期)2018-08-03
铁道通信信号(2018年1期)2018-06-06
照明工程学报(2017年3期)2017-07-10
军事历史(1985年2期)1985-01-18