
一种智能阀门定位器控制算法
2013-07-06 02:02付健,马林
重庆理工大学学报(自然科学) 2013年4期
付 健,马 林
(重庆川仪自动化股份有限公司,重庆 401121)
随着化工、冶金、电力和制药等行业的快速发展,在整个过程控制中,人们对气动调节阀的控制品质提出了更高的要求。智能阀门定位器作为气动调节阀的大脑,对整个调节阀控制系统的性能起着决定性的作用[1-7]。
智能阀门定位器根据其I/P转换单元工作原理的不同,可以分为压电阀式与喷嘴挡板式2种。喷嘴挡板式智能阀门定位器具有控制平稳、动态特性好等优点,但是由于其利用气平衡原理进行工作,对气源的稳定性要求较高,且气量消耗较大,不利于节能减排。压电阀式智能阀门定位器采用开关原理进行工作,对气源的稳定性要求较低,且内阻极高的压电陶瓷材料功耗极小,因此广受青睐。
目前,国际上比较主流的压电阀式智能阀门定位器以德国西门子公司生产的SIPART PS2系列为代表,其主要采用“五步开关”算法进行控制。随着我国自动化仪表技术的发展,国内也出现了几款压电阀式智能阀门定位器。HVP智能阀门定位器由重庆川仪自主研发,采用压电阀作为I/P转换单元核心,控制算法在“五步开关”算法基础上进行了自主创新,弥补了传统“五步开关”算法在控制中的缺陷,此项技术已经达到国际先进水平,打破了国外产品对该市场的垄断。
1 工作原理
调节阀控制系统如图1所示,由系统控制信号、控制单元、I/P转换器、位置传感器、启动调节阀构成,其中控制单元、I/P转换器、位置传感器是智能阀门定位器的重要组成部分。
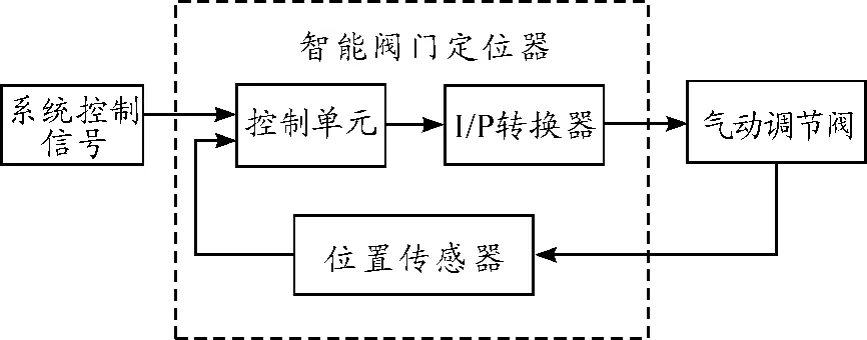
图1 调节阀控制系统
系统将控制信号作为控制输入变量送入智能阀门定位器。智能阀门定位器将气动调节阀的开度通过位置传感器采集进来,将其作为反馈变量。经过量纲归一化处理后,控制单元将控制输入变量与反馈变量进行对比,通过算法计算出恰当的脉冲波形,将脉冲信号送入I/P转换器,控制气动调节阀进行相应的动作,直至控制输入变量与反馈变量相同时,智能阀门定位器停止输出,气动调节阀停于目标位置[8-11]。
HVP智能阀门定位器利用微处理器输出脉冲控制信号,通过I/P转换器将数字电信号转化为开关的气信号,从而驱动气动调节阀,使之做出相应动作。其中脉冲控制为整个工作的重中之重。
在实际应用中,HVP智能阀门定位器首次安装之后,其对被控对象(调节阀及气动执行机构)属性并不了解,如行程、作用方向、速度、摩擦力、气泄漏量等,所以定位器在投入自动运行之前,必须进行一次运行参数的自动整定,简称“自整定”。在自整定中,定位器通过控制调节阀全开全关的移动,确定其行程、作用方向及速度,同时利用不同周期的脉冲,控制调节阀全行程移动,确定最优的脉冲周期。
2 控制算法设计
脉冲宽度调制是英文“pulse width modulation”的缩写,简称脉宽调制(PWM),是利用微处理器的数字输出对模拟电路进行控制的一种非常有效的技术,被广泛应用在从测量、通信到功率控制与变换的许多领域中。HVP智能阀门定位器就利用了这一技术。
在PWM控制技术中,最重要的是PWM周期的选取及占空比的控制,其中PWM周期的选取是基础。如果周期过小,输出能量小于被控对象的启动阈值,可能出现输出推不动被控对象的情况;如果周期过大,又会影响PWM控制的连续性,使被控对象出现时停时走的现象。相对于周期的选取,PWM占空比的控制则是PWM控制技术的核心。占空比过大,送给被控对象的能量就多,容易出现控制超调的现象;反之,则会出现速度过慢,调节时间过长的现象,最终直接影响控制品质。
2.1 PWM周期的选取
在HVP智能阀门定位器中,PWM周期选取的工作主要是在自整定中进行的。在自整定中,分别用不同周期,占空比为50%的PWM脉冲驱动调节阀,对其进行全行程的开环实验,记录并寻找最优的PWM周期。寻找的标准是:输出的PWM脉冲既能驱动调节阀,又能使其连续稳定的运动,并且运动速度的大小满足控制要求。
2.2 PWM占空比的控制
PWM占空比的控制是一项复杂的工作。在HVP智能阀门定位器中,摒弃了传统以固定占空比进行控制的方式,取而代之的是以变化的占空比进行自适应控制。通过定时对速度及阀位的采样,算出该位置理想的速度,与当前速度进行比较后,进行PWM占空比的调整。
2.3 控制算法核心
本设计整体依然沿用经典的“五步开关”算法进行控制,但在实现的细节上进行了适当的修改。“五步开关”算法示意图如图2所示。

图2 “五步开关”算法示意图
在图2中,当e≤e1或e≥e2时,被控对象处于快速区,采用棒棒控制;当e3>e>e1或e2>e>e4时,被控对象处于低速区,采用PWM脉冲控制;当e4≥e≥e3时,被控对象处于控制死区内,采用直接关闭PWM输出的方式使调节阀停止于控制死区内。
在自整定中,通过进行调节阀全行程的开环实验,分别找出进排气过程中的最大速度并记录此时位置。根据记录的最大速度位置,控制调节阀以全开的方式分别从两个端点运行,当阀位到达相应最大速度位置处,停止输出,控制阀位保持,测量最大过冲量。并将相应的最大过冲量作为“五步开关”算法中的判定依据|e1|和|e2|。其中,最大过冲量为阀位最大速度位置到停止位置之间的位移量。
传统的“五步开关”算法在低速区采用定PWM占空比进行控制,在实际应用当中,存在过度不平滑、后期脉冲过大造成超调等问题。为了满足运行的平稳性,定位器需要在快速区与低速区完成无扰切换,使速度随位移的增大平缓降低,避免后期控制过冲等现象,所以提出了低速区理想速度-位移曲线。低速区理想速度-位移曲线如图3所示。
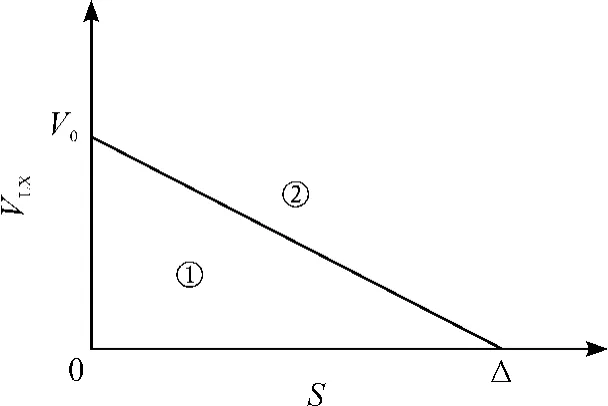
图3 低速区理想速度-位移曲线
在单次控制流程中,将调节阀从快速区进入低速区的时刻记作t0,记录该时刻的速度V0及与目标位置差值的绝对值Δ,将 V与Δ代入公式VLX=a×S×b,求出系数a与 b,其中S为 t0时刻后调节阀的位移量,VLX为某阀位下的理想速度。低速区理想速度-位移公式为S×V0。
在取得低速区理想速度-位移公式后,通过定时采样,得到S,将其代入低速区理想速度-位移公式,求出VLX。当VSJ<VLX时,即调节阀工作于图3的区域①中时,说明调节阀速度过低,此时利用二分法增大输出PWM脉冲的占空比,使VSJ提高;当VSJ>VLX时,即调节阀工作于图3的区域②中时,说明调节阀速度过高,此时利用二分法减小输出PWM脉冲的占空比,使VSJ降低;当VSJ=VLX时,说明此时实际速度大小合适,符合低速区理想速度-位移曲线,输出 PWM脉冲占空比保持不变。
在下一次控制流程中,低速区理想速度-位移曲线需要重新绘制,即求出新的低速区理想速度-位移公式。每次控制流程中,都应有一条新的低速区理想速度-位移曲线及相对应的公式,使该控制流程具有一定的自适应及鲁棒特性。
3 实验研究
3.1 实验条件
实验分别将该算法与传统“五步开关”定PWM占空比算法在相同的条件下进行应用,比较二者的控制效果。在实验中,采用重庆川仪生产的气动调节阀作为被控对象。气动执行机构型号为HA2D,行程为30 mm,信号压力范围为80~240 MPa,作用方向为正作用,调节阀公称直径25 mm,填料类型为石墨。实验调节阀控制系统如图4所示。

图4 实验调节阀控制系统
3.2 实验分析
基于2种算法的定位器分别通过自整定后,确定相应控制参数。输入10%的阶跃信号后,2种算法控制曲线对比如图5所示。实验数据如表1所示。
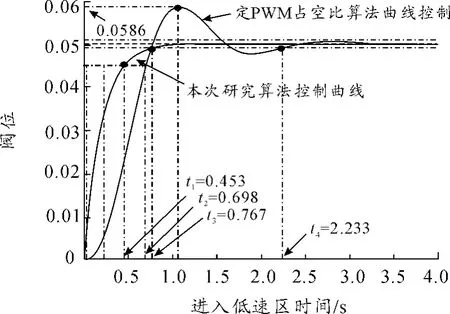
图5 2种算法控制曲线对比
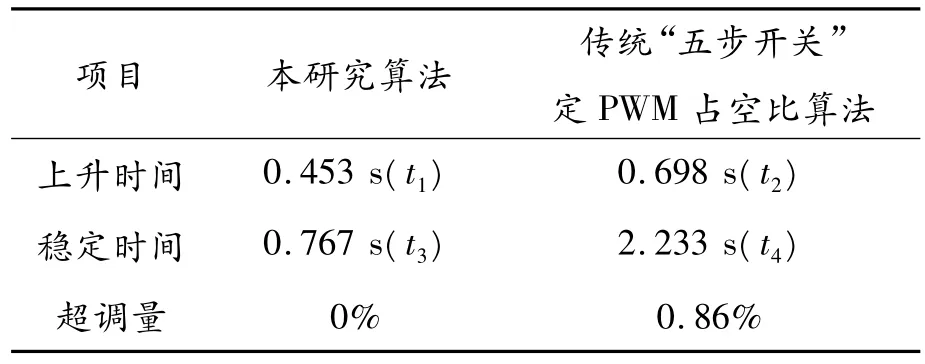
表1 实验数据
由于该算法对速度的调节,前期输出的PWM占空比加大,所以上升时间较短,速度过度平滑,即t1<t2;当阀位接近目标值时,PWM占空比迅速减小,阀位速度及时降低,有效避免了控制超调现象,超调量远小于传统“五步开关”定PWM占空比算法,总体控制时间得到了缩短,即t3<t4。
4 结束语
以上实践研究表明,该控制算法具有较好的自适应及鲁棒特性。采用变PWM占空比算法对速度进行量化控制,有效解决了算法切换过度过程当中速度不平滑及后期容易超调等问题。经过本次研究,该控制算法在HVP智能阀门定位器中得到了成功的应用,产品现已大规模量产。
[1]SOEHARTANTO T,KAUSTAR L,SUYANTO.Auto tuning valve positioner on process control training(PCT)base on PC[C]//IEEE Circuits and Systems.[S.l.]:APCCAS Proceedings,2002.
[2]WAKUI T.Performance improvement of digital positioner for pneumatic control valve with large hysteresis[C]//Proceedings of the 7th International Symposium on Fluid Control.[S.l.]:Measurement and Visualization,2003.
[3]WAKUI T.Hysteresis compensation loaded in digital positioner for pneumatic control valve with tightened grand packing[C]//Proceedings of SICE Annual Conference.[S.l.]:[s.n.],2003.
[4]Compatibility of Analog Signals for Electronic Industrial Process Instruments,ANSI/ISA-S50.1-1982[Z].
[5]oshiyuki ASAKURA ,shuzhou YAMADA.Stabilization of Electropneumatic Valve Positioner Using Simplified simth Method[J].JSME International Journal,2009,23:123-129.
[6]尚群立,蒋鹏.智能电气阀门定位器的研制[J].仪器仪表学报,2007,28(4):712-721.
[7]钟盛辉.关于 HVP系列智能阀门定位器的研发[J].自动化仪表,2007,28(9):126-128.
[8]李祖枢.仿人智能控制[M].北京:国防工业出版社,2003.
[9]侯志林.过程控制与自动化仪表[M].北京:机械工业出版社,1999.
[10]俞金寿,蒋爱平,刘爱伦.过程控制系统和应用[M].北京:机械工业出版社,2003.
[11]张化光,孟祥萍.智能控制基础理论及应用[M].北京:机械工业出版社,2005.
猜你喜欢
仪器仪表用户(2022年10期)2022-09-29
仪器仪表用户(2022年9期)2022-08-30
仪器仪表用户(2022年4期)2022-04-01
科技创新导报(2021年33期)2021-04-17
环球时报(2020-08-11)2020-08-11
机电工程技术(2018年10期)2018-12-06
石油化工自动化(2018年5期)2018-11-14
电子制作(2017年1期)2017-05-17
现代电子技术(2016年15期)2016-12-01
电气化铁道(2016年4期)2016-04-16
