
多变量四容水箱控制系统实验装置的设计
2013-07-03 08:59李志军郭富民
制造业自动化 2013年10期
李志军,贺 庆,郭富民
(北方工业大学 现场总线及自动化重点实验室,北京 100144)
0 引言
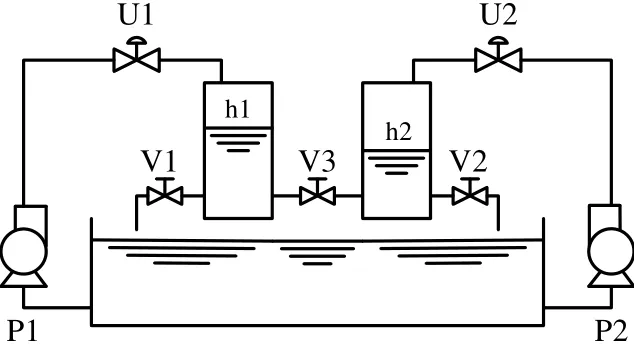
图1 文献[1]双容水箱模型结构
在过程控制领域的实验室装备中,多容水箱是针对液位进行控制的理想控制对象,通过传感器检测液位值,水泵循环供水构成闭环控制系统,因为其模型能模拟工业环境中非线性、时滞性、耦合性等特点,在很多过程控制实验室都有广泛的应用。很多高校常用的是双容水箱或三容水箱。比如中国科技大学魏衡华等[1]介绍的双容水箱,两个水箱水平放置,通过调节相应阀门的开度,控制对象可以设定为一阶或二阶对象,其模型简化图如图1所示。还有一种是华东理工大学王华忠等[2]介绍的双容水箱,两个水箱垂直放置,如图2所示。三容水箱在二容水箱基础上增加了一个容器,最高可以实现三阶的对象,如清华大学何潇等[3]和中南大学王晓静等[4]介绍的三容水箱,模型图如图3所示,同样也有三个水箱上下排列的,这里不再赘述。
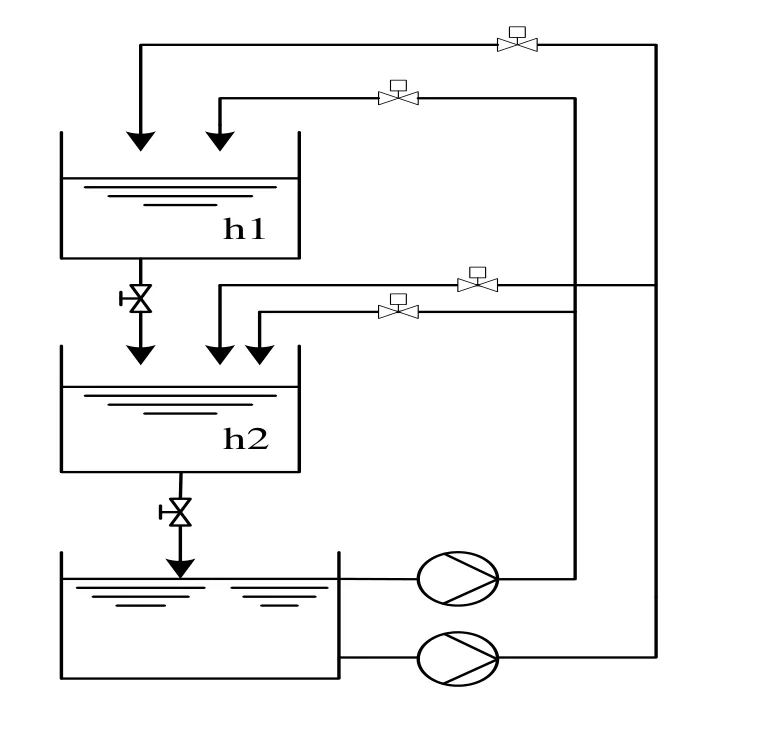
图2 文献[2]双容水箱模型结构
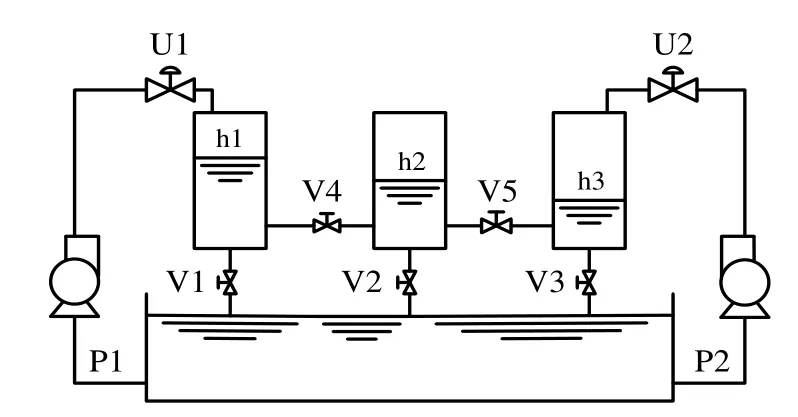
图3 常用的三容水箱对象模型图
以上所举的这些双容水箱和三容水箱可以满足大部分单变量的一阶和高阶对象实验,但是仍然不能反映复杂多变量的特点,另外其上位机没有统一的操作平台,而且一些高级控制算法难于实现。针对这些不足之处,本文所提出的四容水箱被控对象选取Karl Henrik Johansson[5]所介绍的模型,进一步改进管道连接工艺,追求实验效果以及操作平台的广泛性,最终实现一套可以在MATLAB环境中设计控制器的实验装置,该实验装置结构灵活,可以模拟双输入双输出的闭环系统,输入变量与输出变量之间相互影响,交叉耦合,实际应用表明,能很好地模拟复杂工业环境中多输入多输出变量之间强耦合、大时滞、大惯性、非线性、不确定性等特点。
1 四容水箱被控对象的物理结构
1.1 物理结构
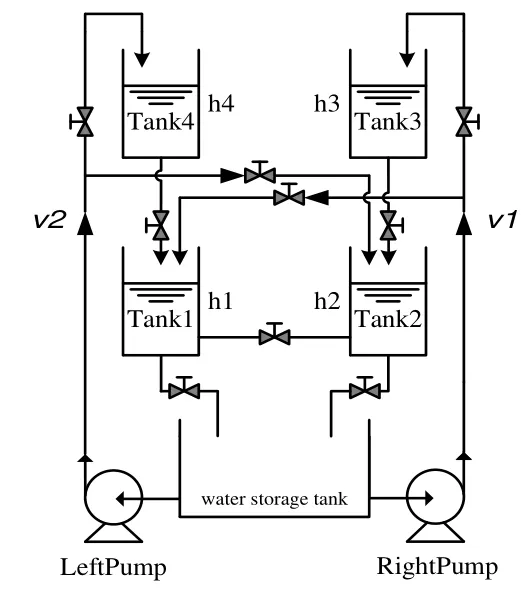
图4 四容水箱物理模型示意图
如图4,其中左边水泵用于给Tank2和Tank4供水,右边水泵用于给Tank1和Tank3供水,此外Tankl、Tank2、Tank3、Tank4底部各有一个出水孔,Tank4排出的水流入Tank1中,Tank3排出的水流入Tank2中,Tank1、Tank2出水孔排出的水直接流回底部大的蓄水池中。管路上配有多个阀门,通过手动调节各个阀门的开度,可以控制每个水箱的入水量和出水量,从而可以改变水箱特性。
1.2 系统数学模型
参照四容水箱结构如图4所示,假设4个相同的水箱横截面积都为A,底部排水孔横截面积都为a,右泵控制的总流量为v1,左泵控制的总流量为v2,hi(i=1,2,3,4)分别为相应水箱的液位高度,r1为v1供给Tank1的阀门开度,r2为v2供给Tank2的阀门开度。根据伯努利原理,得到此四容水箱控制系统满足如下方程:
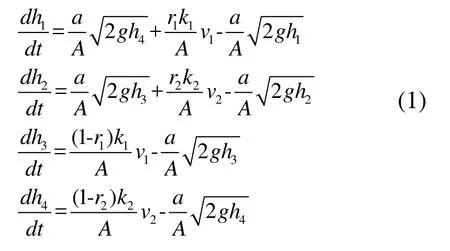
可见,液位高度和水流量呈非线性关系。

v1对h3和v2对h4的影响可归类为二阶非震荡环节,模型结构可选为:

作为双入双出系统,这里以左、右水泵的控制量分别作为输入量u2、u1,Tank1和Tank2的液位值作为输出量y1和y2,四容水箱变量模型如图5所示。
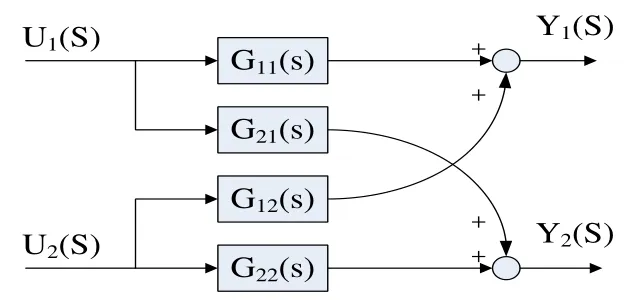
图5 四容水箱变量模型
其中右泵对Tank1、Tank3的控制传递函数分别为G11(s)、G21(s),左泵对Tank4、Tank2的传递函数分别为G12(s)、G22(s)。
其对象的传递函数矩阵可写成:

即:

2 硬件和软件组成及工作原理
2.1 硬件搭建
针对此被控对象,专门设计了整套实验装置,包括硬件的搭建和软件的集成。控制系统实验装置硬件主要由水箱主体、传感器、执行机构、PLC控制系统、计算机组成。
实验装置实物如图6所示。
显然,p的值越大,相应地pc1、pc2、pc3、pc4的值越小,充电成功的可能性越大。下文将针对各参数大小对充电过程性能的影响进一步分析。
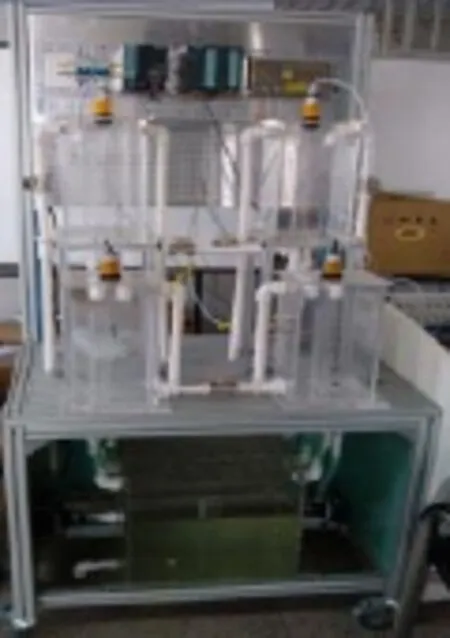
图6 四容水箱实验装置实物图
1) 水箱主体
主要由透明有机玻璃制成的4个长方体水箱(被控对象)和1个大的蓄水池以及连接各个水箱的PVC管道组成。4个水箱之间及其与蓄水池之间连有9个手动阀门。四容水箱物理结构图如上图4所示。
2) 传感器
为了易于PLC编程,选用超声波液位计,量程范围为0~1米,24V供电,最小显示分辨率可达0.1毫米,具有4~20毫安电流输出,具有1~15级发射脉冲强度,可根据工况设定。超声波传感器具有量测噪声小,线性度高等优点,此传感器有5根线——电源正负线、信号线和两根串口调试线,与PLC的接线为三线制接法,另外通过两根调试线和串口调试工具及软件可以在线修改实际的量程范围。本装置采用的量程范围是0~30厘米,协议采用RS485兼容串行接口以及半双工异步方式。
3) 执行机构
选用无刷直流调速水泵,其供电电压范围在18V到36V之间,一般为24V。因为该水泵对输入电压稳定性的要求比较高,所以专门外置直流稳压电源模块给其供电。水泵的驱动器具有双闭环PI调节功能,具有调节速度快,系统时滞小,控制准确等优点。支持三种调速方式:电位器调速,1~5V模拟电压调速或PWM脉宽调速。本装置采用的是1~5V模拟调速。
4) 控制系统
选用西门子CPU315-2PN/DP,因其对二进制和浮点数运算具有较高的处理能力,另外集成的PROFINET接口只需一根网线就可与上位机通信。通过西门子专用连接器扩展一个8×12位AI模块采集四容水箱的实际水位和一个8×12位AO模块给水泵提供实际所需的模拟电压值。
2.2 软件组成
该实验装置软件开发工具有:
1)西门子PLC组态、编程、调试软件STEP7;
2)西门子上位机组态监控软件SIMATIC WINCC;
3)MATLAB/Simulink。
2.3 工作原理
P L C采用工业以太网通讯方式,通过PROFINET接口连接一根网线到计算机上,此计算机作为上位机,安装好上述软件,将编好的程序下载到PLC的CPU中,再利用OPC技术将MATLAB与PLC系统建立通信,从而能够将采集的实时液位值和给泵的控制量嵌入到Simulink环境中,最终在Simulink上构建了对液位控制的闭环反馈系统。实验人员只需通过Matlab/Simulink的操作即可完成控制器的设计,从而使得一些先进的系统辨识技术和先进控制方法可以轻松地应用在四容水箱被控对象上。系统整体框架如图7所示。
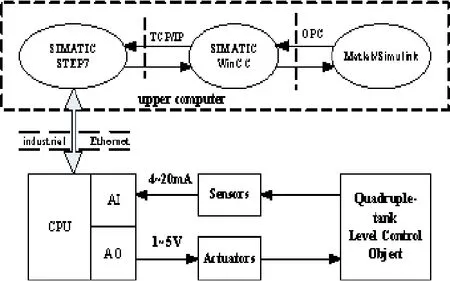
图7 实验装置工作原理图
3 实验示例
四容水箱是双输入双输出并且变量之间耦合度比较高的对象,针对此特点,设计如下实验用PID解耦控制算法来同时控制底部水箱1和水箱2的水位。利用OPC技术建立好WINCC+PLC控制系统与MATLAB的通讯后,在Simulink环境中设计的控制器如下:
其中OPC Config Real-Time用于OPC 客户端和服务器的定义和配置,OPC Read从OPC server中读取实时水位值,OPC Write向OPC server提供泵的控制量,这些模块都是从Simulink自带的OPC Toolbox中直接添加的,另外四个PID Control模块是自定义封装的子系统,分别带有3个控制参数——比例系数P、积分系数I、微分系数D。
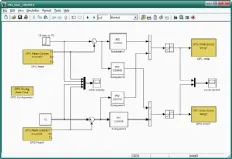
图8 四容PID解耦闭环控制系统
将阀门开到合适的位置,并且泵1和泵2的控制量限幅在0~100的范围,先将水位1和水位2设定在12cm,待稳定后让水位1阶跃到15cm,水位2保持不变,根据系统约束条件和性能指标的要求并结合Zigler-Nichols经验公式参数整定方式[8]调整四个PID的控制参数,得到理想的控制效果,如下所示。最终确定的参数:(控制框图中自上而下依次为
PID1:P=6,I=0.4,D=0.01;PID2:P=3,I=0.2,D=0.01
PID3:P=3,I=0.2,D=0.01;PID4:P=5,I=0.4,D=0.01
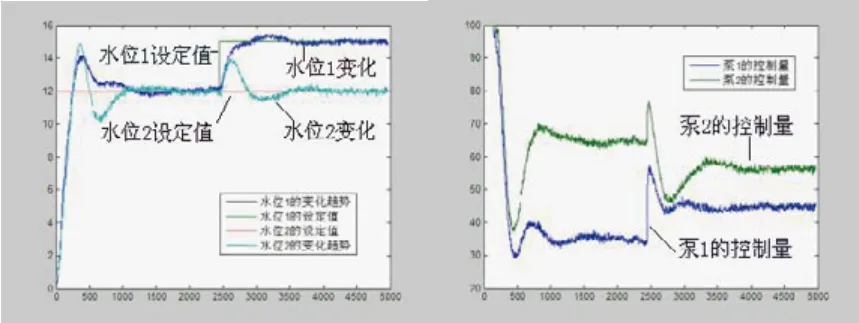
图9 实际控制效果图
其中传感器和泵的采样周期都设为0.25秒,所以横坐标的单位为0.25秒,从效果图可以看出液位在300秒之内可以达到稳定,而且误差可以控制在0.2毫米之内,表明基于此控制对象所设计的四容PID解耦控制器动态特性和稳定性都比较理想,能够满足多变量对象的控制要求。目前,在此实验装置上通过的主要实验项目有:水箱对象模型辨识实验、四容水箱二输入二输出模型预测控制实验、多变量PID控制实验、四容水箱神经网络控制实验。
此外通过调节相应的阀门,此装置也可以组合成单容水箱、双容水箱或三容水箱使用,比如Tank1和Tank2组成水平的双容水箱,或者Tank1与Tank4组成垂直的双容水箱,Tank4、Tank1和Tank2构成混合式的三容水箱等,从而可以进行单变量的相关控制算法实验。
4 结束语
设计开发了具有多输入多输出系统特点的被控对象,即需要控制的变量与操作变量不止一对,而且这些变量之间相互关联,耦合度高。该装置弥补了之前多容水箱只有单一变量的不足,
结构灵活,更真实地模拟了工业环境中复杂多变量的特性,而且实验内容丰富,可以实现多种控制算法,如PID控制,模型预测控制,神经网络控制,模糊控制,自抗扰控制等,能够给多门课程实验提供平台,非常适合实验室环境用于本科生或研究生的教学,还可以提高其工程实践的动手能力。另外,在此实验装置上科研人员可以自行设计和实现各种先进控制策略。目前本套装置已经在多所高校的实验室得到广泛应用,都取得了比较好的实验效果,对今后多变量实验装置的研究具有一定的指导意义和参考价值。
[1] 魏衡华,吴汉生.双容水箱计算机控制实验系统的研制[J]. 实验室研究与探索,2005,24(1):31-33.
[2] 王华忠,孙自强等.基于智能仪表和PLC的双容水箱测控实验系统开发[J].电气电子教学学报,2009,31(z2):1-3.
[3] 何潇,王子栋等.基于Internet的网络化三容水箱实验平台[J].南京航空航天大学学报,2011,43(S):190-193.
[4] 王晓静,潘迪夫等.基于LabVIEW平台的三容水箱实验系统的设计和实现[J].企业技术开发,2008,27(1):3-5.
[5] Johansson Karl Henrik.“The Quadruple-Tank Process:A Multivariable Laboratory Process with an Adjustable Zero”.IEEE Transactions on Control Systems Technology.vol.8,no.3,pp.456-465,2000.
[6] 王咏梅,张妍.基于DCS的三容水箱液位控制实验平台的研究[J].仪器仪表用户,2009,16(5):35-37.
[7] 王志新,谷云东等.三水箱多变量液位控制实验设计[J].实验技术与管理,2007,24(1):32-36.
[8] 杨旭,周悦,于广平.水箱液位控制系统的设计与研究[J].制造业自动化,2011,(16):128-130.
[9] 朱春燕,刘文泉.液位控制系统实验台的研制[J].国外电子测量技术,2012,31(2):91-93.
[10] 华闰祺,徐海峰.基于SIMATIC NET OPC的S7 PLC与WinCC通讯[J].可编程控制器与工厂自动化,2012,(2):70-71.
猜你喜欢
石油工业技术监督(2022年7期)2022-08-18
湖南税务高等专科学校学报(2021年4期)2021-08-30
中学生数理化·中考版(2020年10期)2020-11-27
意林(2018年3期)2018-03-02
电子制作(2017年19期)2017-02-02
北京信息科技大学学报(自然科学版)(2016年6期)2016-02-27
人民交通(2015年4期)2015-12-17
小雪花·成长指南(2015年10期)2015-10-23
汽车维护与修理(2015年2期)2015-02-28
科技传播(2012年10期)2012-06-06
