基于自抗扰控制器的电动变桨伺服控制技术研究
2013-06-21 08:33:26汪常明张雷胡书举赵斌
电气传动 2013年3期
汪常明 ,张雷 ,胡书举 ,赵斌
(1.中国科学院 风能利用重点实验室,北京100190;2.中国科学院 电工研究所,北京 100190;3.中国科学院 研究生院,北京100049)
1 引言
随着全球能源的日益紧张,世界各国都在大力发展可再生能源。风能作为一种洁净的可再生能源已经得到了大规模开发应用。目前,国内外MW级以上风电机组已经成为风电市场主流机型,MW级以上风力发电机组普遍采用变桨距控制技术,变桨距伺服控制技术已经成为研究热点。
风电机组要求变桨系统具有位置无超调、动态响应速度快、稳定精度高和抗负载及参数扰动能力强等特点。在电动变桨伺服系统中,执行电机电枢绕组的电阻值和电感值易受温度影响,不同生产厂家提供的电机参数也存有差异,这些因素的影响会降低PID闭环控制系统性能。常规PID控制能够满足稳态精度高、动态响应快的要求,但在抗负载及电机参数扰动能力方面较差。为此,本文通过引入自抗扰控制器,可以很好地解决电机参数扰动带来的控制性能降低,同时可以解决快速性和超调的矛盾[1-2],减小了转速超调对电动变桨齿轮箱的冲击。文中将自抗扰控制器应用于串励直流电机伺服控制系统的转速环,为满足电流跟踪的快速性,电流环采用传统PI控制方法。仿真结果表明,在串励直流电机电动变桨伺服系统中采用自抗扰控制技术,既控制住了较大范围内电机参数扰动或变化造成的不良影响,又实现了转速的快速无超调跟踪。
2 串励直流电机数学模型
串励直流电动机的电路原理图如图1所示。
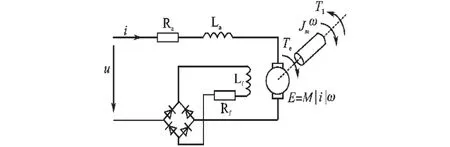
图1 串励直流电动机原理图Fig.1 Principle diagram of series-excited DC electrical motor
如果不计磁路磁通量的饱和,串励直流电动机的气隙磁通Φ与电枢电流和励磁电流If成正比,即Φ=kIf=k|Ia|,其中k为比例系数。电磁转矩与电枢电流之间的关系为Tem=CT·Φ·Ia,其中CT为转矩常数。从而可得串励直流电动机的电磁转矩方程为

由式(1)可知,电动机电磁转矩正比于电枢电流的平方,即随着电流的增加,转矩将呈平方倍增加,所以串励电动机与其他类型的电动机相比,在启动电流一样的情况下,启动转矩较大,且过载能力也较强[3-4]。
根据图1,可以建立其动态电压平衡方程和转矩平衡方程为
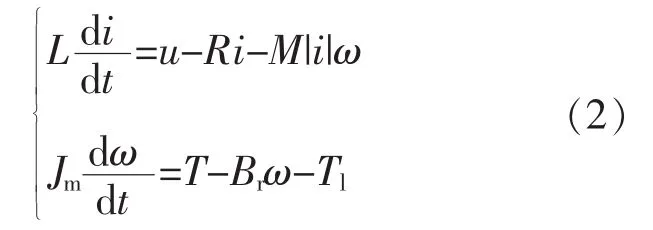
式中:i为电动机的电枢电流;ω为电动机的角速度;u为电动机的输入控制电压;R为电动机的电枢回路总电阻;L为电动机电枢回路总电感;Jm为电动机的转动惯量;Br为粘滞摩擦系数;T为电磁转矩,T=M|i|i;M为电动机转矩系数;Tl为负载转矩。
3 自抗扰控制器设计
自抗扰控制器(ADRC)是由韩京清研究员经过20多年的潜心研究提出的一种非线性控制器,具有系统响应快、超调小、参数适应范围广等优点,受到控制界的普遍关注,在电力、航空、电机调速系统等领域得到了推广应用[1,5-6]。
自抗扰控制器是由跟踪-微分器(TD)、扩张状态观测器(ESO)和误差非线性控制律(NLSEF)3 个部分构成的一种非线性控制器[5,7]。 首先,由TD跟踪输入信号及输入信号的微分;然后,与ESO反馈回来的被控对象的输出信号及输出信号的微分进行作差运算,在NLSEF中对误差反馈进行非线性控制;非线性控制的输出与ESO反馈回来的扰动量进行补偿,补偿后的控制信号最终作用到被控对象上。二阶自抗扰控制器的结构图如图2所示。
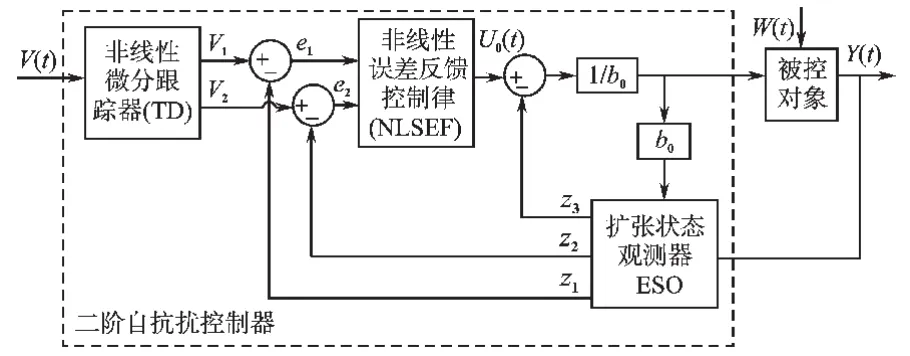
图2 二阶自抗扰控制器结构图Fig.2 Structure of a second order autodisturbances-rejection controller
自抗扰控制器吸收了经典PID控制器按反馈误差调节的精髓[7-8],借鉴了状态观测的思想,并采用非线性组合来构造新型控制器。它克服了传统PID控制器通常无法获取微分信号的弱点,采用微分跟踪器来跟踪输入信号及其n阶微分信号,采用状态观测器跟踪输出信号及其n阶微分信号。通过使用扩张状态观测器对系统的总扰动(内扰和外扰)进行观测,然后对总扰动进行补偿,因而它不完全依赖于被控对象的数学模型。
下面给出二阶自抗扰控制器常用的离散控制算法。
跟踪-微分器TD为

式中:h为积分步长 (滤波参数);r为决定跟踪快慢的参数;fst为离散时间系统最优函数。
算法中r和h为可调参数,r越大,跟踪速度越快,h越大,滤波效果越好。但是r和h又是一对矛盾,因此二者需要协调配合。
扩张状态观测器ESO为
z21(k),z22(k)为给出对象状态变量的估计,而z23(k)估计对象所有不确定模型和外扰的实时作用的总和,即 z23(k)→f(x1,x2,t)+w(t)。 非线性参数 α1,α2和δ一般根据实际运行经验取为固定值。β01,β02,β03是需要协调调整的参数。
非线性状态误差反馈控制律NLSEF为
式中:x1(k),x2(k)为由TD安排的过渡过程的输出及其微分;z1(k),z2(k)和,z3(k)为由 ESO 输出的控制对象的状态变量;z3(k)/b是对扰动作用的补偿。
非线性参数{α1,α2,δ}一般根据实际运行经验取为固定值。系数β1,β2需要协调整定,适当增大参数β1,可加快响应速度,缩短过渡过程;适当增大参数β2,则可抑制超调。
式(4)和式(5)中的 fal()函数的表达式为

式中:e为误差值;δ和α为自抗扰控制器参数。
4 电动变桨伺服驱动转速环控制器设计及仿真验证
根据二阶自抗扰控制器TD,ESO及NLSEF 3个组成部分的离散控制算法,采用Matlab/Simulink中的S_Function函数来实现特殊动态系统定制成为用户自定义的Simulink模块[9-10],按图2中的结构搭建二阶自抗扰控制器,其设计框图如图3所示。

图3 转速环二阶自抗扰控制器设计框图Fig.3 Design block diagram of the second order autodisturbances-rejection controller of speed ring
利用Matlab的封装技术对图3自抗扰控制器进行封装,将封装完的二阶自抗扰控制器应用于变桨伺服驱动系统的转速环,考虑到电流环对跟踪速度的要求,采用传统的PI控制器。其仿真系统结构如图4所示。
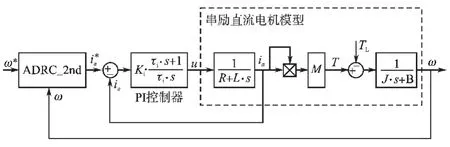
图4 伺服驱动系统仿真结构图Fig.4 Simulation structure of servo drive system
用于仿真的电机参数如下:电枢回路电阻0.273 4 Ω,电枢回路电感0.012 H,电动机的转动惯量 0.03 kg·m2,转矩系数 0.041 Wb/A,粘滞摩擦系数0.06。电机电枢绕组参数变化范围如表1所示,对比PI和ADRC控制算法的控制效果。

表1 电机电枢绕组参数变化表Tab.1 Motor armature winding parameters change table
仿真实验中,转速先给定为单位阶跃信号,等到响应稳定后,在0.2 s时转速给定阶跃至10 r/min,观察电机动态响应效果;然后,待电机重新稳定运行后,在0.6 s时负载转矩由初始值10 N·m跳变至20 N·m,观察转速和电流变化。
仿真结果如图5所示,图5中分别显示了不同参数下转速和电枢电流响应曲线。

图5 参数正常情况下响应曲线Fig.5 The response curves of parameter normally
参数正常情况下,分别调整好PI和ADRC的控制参数,跟踪单位阶跃时二者的控制效果基本一致。由图5可以看出,在0.2 s处,当转速阶跃跳变时,PI控制下的转速超调13%,而自抗扰控制下的转速无超调;在0.6 s处,转矩由10 N·m跳变至20 N·m时,ADRC控制下的转速变化也比PI控制下的效果优越。
由图6、图7可以看出,当电机参数扰动为50%,100%时,PI控制下初始的单位阶跃跟踪时转速跟踪变慢,电枢电流变化较大;而采用ADRC控制时,转速跟踪基本没有超调,电枢电流变化小。
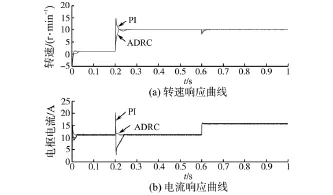
图6 参数增加50%时的响应曲线Fig.6 The response curves of parameters increased by 50%

图7 参数增加100%时的响应曲线Fig.7 The response curves of parameters increased by 100%

图8 参数增加200%时的响应曲线Fig.8 The response curves of parameters increased by 200%
从图8中可以看出,当电机参数增加200%时,PI控制情况下,转速超调达80%,电枢电流也变化剧烈,甚至出现负电流;而ADRC控制情况下,转速跟踪无超调,电枢电流超调2%。显而易见,采用ADRC较PID控制方法具有更好的控制效果。
5 结论
由Matlab仿真结果可以看到参数扰动情况下电动机的电枢电流、转速的变化过程,与常规的PID控制仿真结果相比,速度环采用自抗扰控制器不仅可以大大提高电机参数扰动的范围,而且可以既快又无超调的跟踪转速的给定值,具有良好的动态控制性能。由此证明了本文提出的电动变桨伺服控制方案的可行性,验证了自抗扰控制器参数适应性广,能自动检测并补偿控制对象内外扰动,在控制对象内部参数变动或遇到不确定性扰动时,都能得到很好的控制效果,具有较强的适应性和鲁棒性。
[1]韩京清.自抗扰控制器及其应用研究[J].控制与决策,1998,13(1):19-23.
[2]ZhengQing,ChenZhongzhou,GaoZhiqiang.APratical Approach to Disturbance Decoupling Control[J].Control Engineering Practice, 2009,17(9):1016-1025.
[3]陈伯时.电力拖动自动控制系统[M].第3版.北京:机械工业出版社,2009.
[4]姚泽胜.电动汽车用串励直流电机控制原理的研究[D].武汉:武汉理工大学,2011.
[5]韩京清.自抗扰控制技术——估计补偿不确定因素的控制技术[M].北京:国防工业出版社,2008.
[6]韩京清.从 PID 技术到“自抗扰控制”技术[J].控制工程,2002,9(3):13-18.
[7]Su J B,Qiu W B,Ma H Y,et al.Calibration-free Robotic Eye-hand Coordination Based on an Auto Disturbancerejection Controller[J].IEEE Transactions on Robotics and Automation, 2004,20(5):899-907.
[8]郭松山.电动机自抗扰控制技术研究综述[J].机电技术,2009(S1):12-15.
[9]王兵树,姜萍,林永君,等.SIMULINK中自抗扰控制技术自定义模块库的创建[J]. 系统仿真学报,2010,22(3):610-615.
[10]胡琳静,孙政顺.SIMULINK中自定义模块的创建与封装[J].控制工程,2008,15(S):4-6.
猜你喜欢
火力与指挥控制(2022年5期)2022-07-25 03:50:10
弹箭与制导学报(2020年1期)2020-07-09 10:52:00
建材发展导向(2019年13期)2019-08-24 06:37:40
弹箭与制导学报(2019年6期)2019-06-24 08:40:20
电子制作(2019年7期)2019-04-25 13:16:50
大电机技术(2018年4期)2018-09-26 03:11:38
照明工程学报(2016年3期)2016-06-01 12:17:56
通信电源技术(2016年1期)2016-04-16 04:57:28
电源技术(2016年2期)2016-02-27 09:05:15
电测与仪表(2014年1期)2014-04-04 12:00:32