E-Navigation 技术及其发展建议
2013-06-10 03:25王党卫胡安平
中国电子科学研究院学报 2013年1期
王党卫,胡安平
(中国电子科技集团公司第20 研究所,西安 710068)
0 引 言
随着世界经济的发展,从事海上运输和渔业的船只越来越多,出现了许多吨位更大、速度更快的船只,沿海水域更加拥挤,而由于船只的增加很快,每个船上有经验的船员在减少,使得全球海运出现事故的风险增大。据统计,海上船只出现的事故中,80%是由人为造成的。
面对日益复杂的海上运输环境,国际海事组织(IMO)基于协调海上导航系统和海岸服务的需求,在2006 年成员声明中提出了e-Navigation 的概念。根据IMO 对e-Navigation 的定义,e-Navigation 是指协调搜集,综合,交换,表达和分析船上的和岸上的海上信息,为了在海上的安全(safety)和保安(security),以及保护海上环境,采用电子手段来增强停泊处到停泊处的导航和相关服务。在IMO 等国际组织及国家、用户及工业界的支持下,每年都召开e-Navigation 会议,商讨e-Navigation 技术的发展及执行战略,最终的e-Navigation 战略执行计划将在2014 年制定完成[1~2]。
1 E-Navigation 技术体系介绍
E-Navigation 的概念中的“e”可以代表“增强(enhanced)”或者“电子(electronic)”,但这未必限制在e-Navigation内所能做的事情,可以把e-Navigation 整体当作一个类似商标的标记来看待。E-Navigation 中至少包括了增强的覆盖所有导航区域电子海图、增强的位置导航定位,以及强壮的通信能力等几个方面的内容[2~3]。
E-Navigation 的一个描述如图1 所示,图中虚线的椭圆所圈的部分,都可以归到e-Navigation 的范畴之内,可以看到,e-Navigation 的内容是相当广泛的。既包括了有传统的辅助导航手段如ECDIS/GIS、Radar、INS/IBS、VTS、AIS、DGNSS 等,也包括了各种通信手段如VHF/HF/MF、卫星通信、网络数据交换等,还包括了远距离识别和跟踪LRIT、航海气象信息、水文传感器、辅助靠泊等内容,可以说是组成了一个保证航海航行安全的信息网络系统。
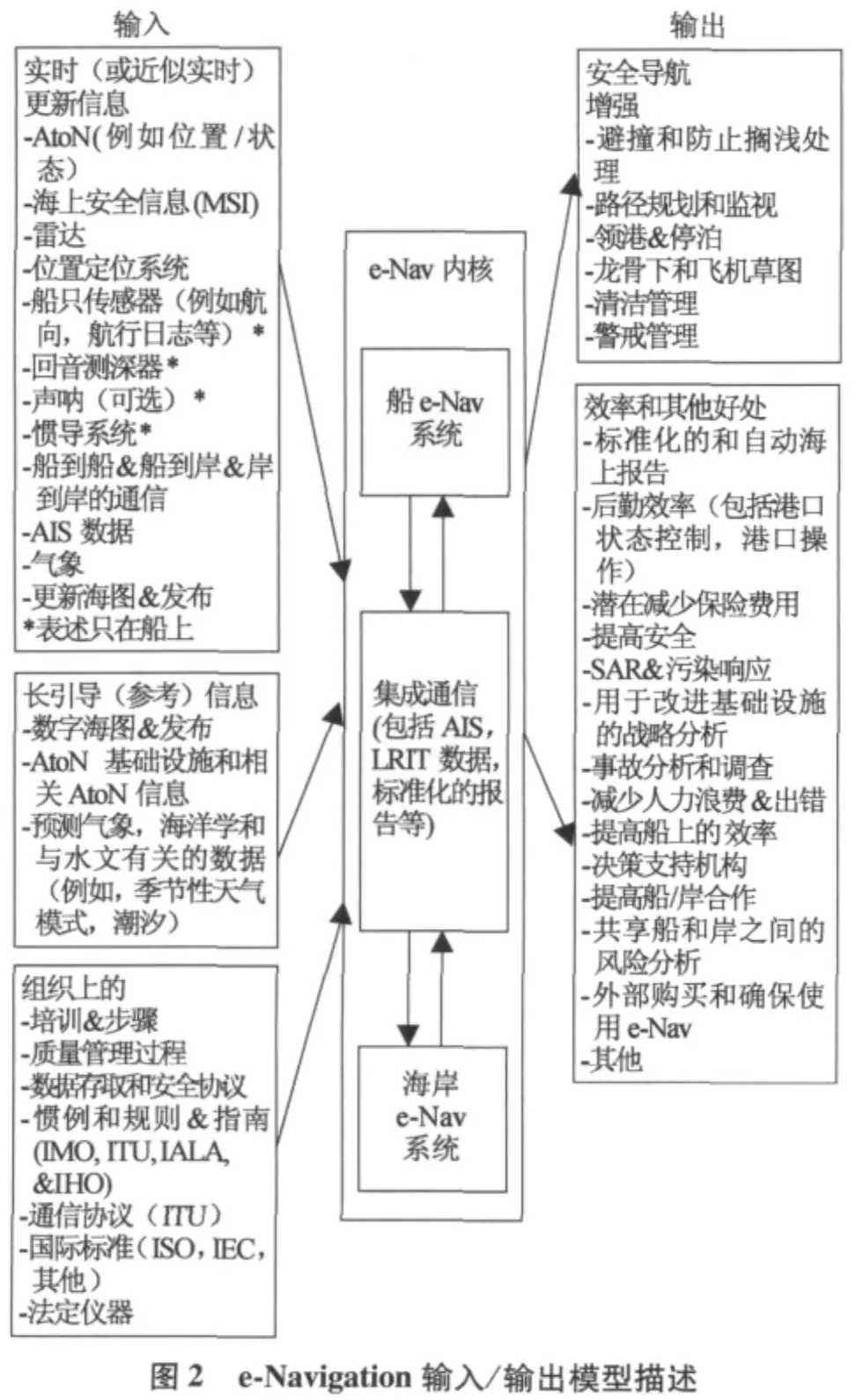
对e-Navigation 的体系,也可以从输入输出的角度进行划分,e-Navigation 的一个输入/输出模型描述体系,如图2 所示[2~3]。

按照IMO 的考虑,通过实施e-Navigation,希望能达到如下目标[1~2]:
(1)考虑到水文地理气象和导航信息及风险,促进船只导航的安全和安心;
(2)从岸边/沿海位置合适的设施,促进船只交通观察和管理;
(3)促进通信,包括数据交换,船只到船只,船只到海岸,海岸到船只,海岸到海岸和其他用户之间;
(4)提供机会来提升交通效率和后勤;
(5)支持偶然事件响应的有效实施,以及搜索和救援服务;
(6)演示适合一个安全非常重要系统划分等级的精度,完整性和连续性;
(7)通过一个人性化接口,综合和展示船上和岸上的信息,使得导航安全性优点最大化,任何混乱或者从使用者的角度误解的风险最小化;
(8)综合和展示船上和岸上的信息,以管理用户的工作量,同时也激发和吸引用户,并支持决策;
(9)通过开发和执行过程,同时进行对用户的培训和熟悉需求;
(10)促进全球覆盖,一致的标准和安排,以及相互兼容和设备、系统、符号和操作步骤的互用性,以便避免用户之间的潜在冲突;
(11)可升级的,以方便所有潜在海上用户的使用。
从以上目标可以看出,e-Navigation 是一个复杂的系统工程,而且随着实际需要而不断发展。e-Navigation的实施除了需要国际组织和国家之间的协调之外,还需要大量的通信、导航、探测、识别等基础设施来支撑。
2 发展建议
从目前航海所用的手段来看,还不能满足实现e-Navigation 目标的要求,还需要大力发展电子信息系统的基础设施来支撑e-Navigation 系统。下面就针对导航、通信、电子海图等方面的发展提出一些建议。
2.1 建立完备的无线电导航监测和差分系统
传统的导航能力可以作为e-Navigation 的基础。传统的船载导航手段包括惯性导航平台和无线电导航系统,惯性导航平台只装备在一些大型和特种船只上,在一般的船上配备有全球卫星定位导航仪,有些还有罗兰C 导航仪,但目前更多的是依赖于GPS。要实现e-Navigation 的要求,必须要对传统的导航系统进行性能的提升,以满足导航的可用性、连续性、高可靠要求。除了采取措施提升传统无线电导航系统自身能力之外,还可采用以下方式来提升现有导航系统的性能。
(1)建设无线电导航完善性监测系统
无线电导航系统具有精度高、误差不累积的优点,特别是卫星无线电导航系统,可以实现全球覆盖,是目前无线电导航的主要手段。但卫星导航系统自身也有可能因元器件故障而使系统可用性降低甚至中断。例如GPS 系统,2000 年7 月28 日至8月24 日卫星时钟不稳定,抖动较大;2002 年10 月28 日一个卫星时钟不稳定,持续近2 个小时;2004年1 月1 日,一个卫星时钟故障,持续3 小时。另外,卫星无线电导航信号也可能遭受有意或无意的干扰,使得在某区域无法工作。其他的无线电导航系统也有可能发生类似的问题。因此,有必要建立无线电导航完善性监测系统,及时对e-Navigation 系统中的导航系统提供完善性告警信息。
无线电导航完善性监测站设置在港口和船只运行密集区域附近,实时监测无线电导航的完整性,并将监测结果通过无线数据通道广播出去,或者根据需要,在必要时只广播完善性告警信息。船上的无线电接收装置接收到收到告警信息时,做必要的处理,以保证航行导航的可靠性。
目前,船只最常用的无线电导航信息包括了卫星导航和罗兰C 导航。卫星导航目前主要有GPS、GLONASS、Galileo 和我国的北斗卫星导航系统。在监测站,由无线电导航监测接收机实时接收处理所收到的各种无线电导航信号,与已知的参数做比较后,给出完整性监测信息。当出现无线电导航信息故障时,监测站及时将告警信息通过无线电通道,广播给船只,提醒船员做相应的操作处理。
(2)建设无线电导航差分系统
按照GLA(英国灯塔总局)的研究,船只在港口航道中,需要2 ~10 m 的定位精度,而进入船坞则需要20 mm 的定位精度。美国海岸警卫队的研究,船只在海港入口和航道中需要8 ~12 m(95%)的精度要求。在欧洲开展了差分eLoran 的试验研究,其试验研究结果表明,精度可以达到10 m 以内。几种无线电导航系统在港口及限制水域要求及精度,如图3 所示,可以看到无线电差分导航系统能够满足IMO.A.915 对港口航道和限制水域的精度要求[4]。
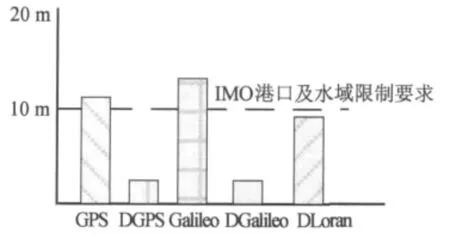
图3 无线电导航系统在港口及限制水域精度要求
实时无线电导航差分定位系统是由基准站、无线数据通道和用户接收机组成。基准站的坐标精确已知,在基准站的基准监测接收机可以将伪距、载波相位和导航电文信息处理后,发给用户接收机信息,用户接收机则进行差分定位。高精度的卫星导航RTK 技术,则将基准站的原始观测值及基准站的坐标和天线高等数据发送给接收机,可以进行厘米级的高精度定位。通过在沿海港口航道测量建立一点数量的差分基准站,并进行合理布局,形成网络,以便对船只进行e-Navigation 高精度定位。
2.2 提升船只e-Navigation 设备性能
目前的船只上的导航通信设备,功能较为单一,更多的需要船上人员的操控处理,操作人员负担较多,需要在体系上,对船只完成e-Navigation 进行性能提升改造[5]。船只e-Navigation 设备的体系框架,如图4 所示。
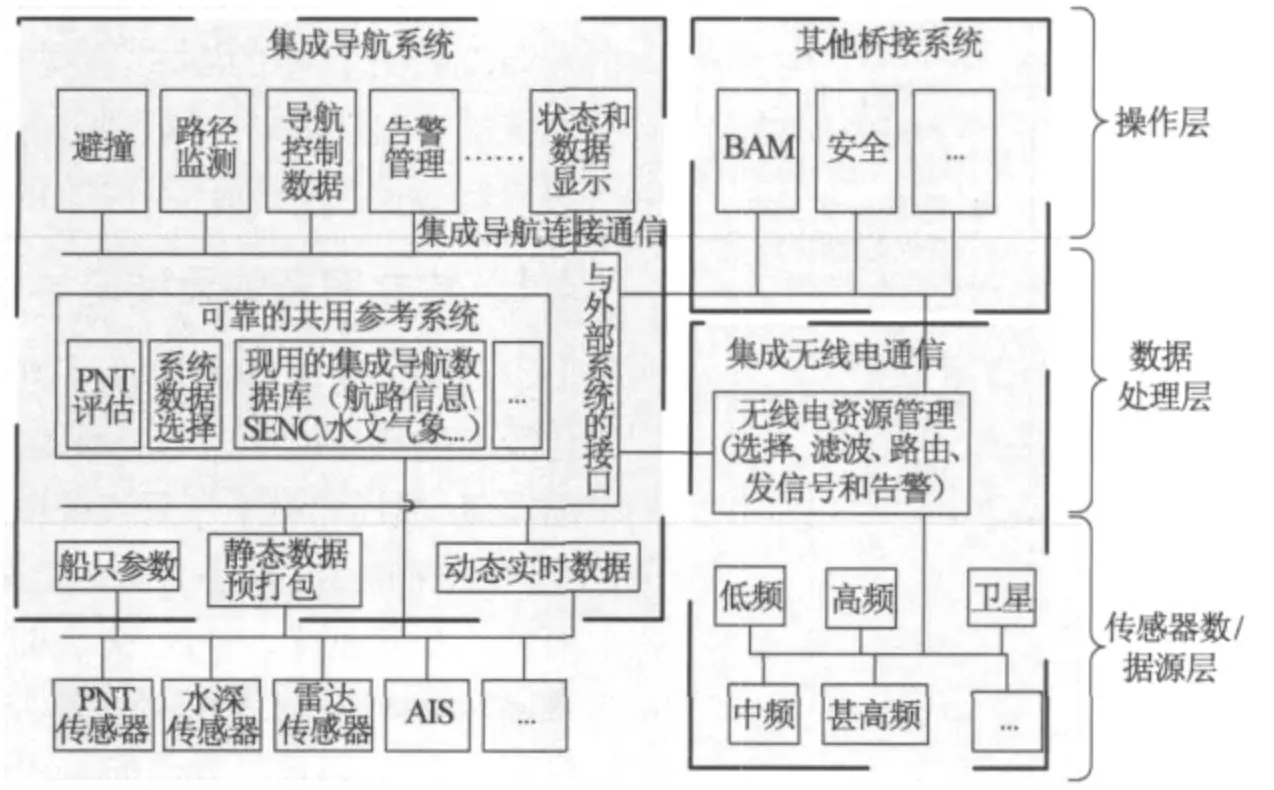
图4 船载e-Navigation 设备体系
船载e-Navigation 设备涉及操作层、数据处理层、传感器/数据源层等多个方面的系统或设备。在传感器/数据源层面,涵盖了PNT(定位/导航/授时)传感器、水深传感器、雷达传感器、AIS(船舶识别系统),从低频至甚高频的通信设备,以及卫星通信设备。在数据处理层面,需要对PNT 数据进行评估,对集成导航系统的参考数据库进行实时更新和处理,对无线电通信资源进行管理。在操作层面,涉及了避撞、路径监测、导航控制与告警管理等导航控制的内容,同时还要与安全等其他系统进行交联操作。
船载e-Navigation 设备可以在以下方面进行性能提升:(1)将来的船载e-Navigation 将面向全球海域应用,因此,需要对覆盖全球的电子海图数据及相关的水文数据进行精确测绘和实时观测,建立测绘观测体系,并能够及时更新船载设备的相关数据库。(2)对船载导航、通信、探测、水文等数据的智能化综合处理,进行数据融合的人工智能处理,实现船只的智能化航行。例如,利用船载导航系统、船载传感器实时确定船只的位置、航向和航速,并借助雷达信息,智能识别危险目标,减少人工操作的差错,提高船只的操控效率,保证航行安全。
2.3 基于(船舶识别系统)AIS 的岸基通信导航一体化系统
AIS 作为一种新兴的航海仪器,对防止碰撞等安全事故的发生起到了重要的作用,AIS 已经发展到在船舶上强制安装执行。我国从2005 年开始,至2010 年已建设了全面覆盖中国沿海和内河主要航道的AIS 基站系统,对我国船舶实时动态监控和管理及区域船舶航行安全发挥了重要作用[6]。
AIS 作为实现e-Navigation 的重要组成部分,目前主要是实现船只监控并实时报告自身的位置。如果能将AIS 基站的位置精确测定,并将众多AIS 基站时间同步,通过AIS 基站的无线电发波通信信道,播发导航授时电文,船载设备通过接收三个以上的AIS 基准导航授时电文,就可以解算出船只自身的位置,实现船只的导航定位和授时。船只通过AIS系统实现自主定位功能,不需要另外增加过多的岸基导航系统建设,只需要在原有AIS 基站的基础上,增加少量设备并升级软件就可以完成,船载设备一般通过软件升级就可以实现导航定位解算,费效比显著。
利用AIS 系统实现船只导航,可以增加船只导航的可靠性和可用性,避免卫星导航系统受到干扰而失效时的导航性能下降问题,为船只e-Navigation提供了另一种独立的无线电导航定位手段,对提高e-Navigation 的整体性能很有帮助。
3 结 语
E-Navigation 是一个进化的和动态的概念,由IMO(国际海事组织)等国际组织推动持续推进,e-Navigation 涉及多方面的内容,需要国家和地区之间的合作,在国际组织中,就涉及IMO、IALA(国际航标协会)和IHO(国际航道组织)的合作。与e-Navigation 相关的还有欧盟的e-Maritime 项目,瑞典海事管理局和丹麦海事安全局的高效海洋项目。通过e-Navigation 项目的研究,可以推进航海导航体系的技术进步。
我国作为航运大国和海事大国,应积极参与国际e-Navigation 体系的技术研究和基础设施建设研发中,参与到国际e-Navigation 相关标准的制定中,同时,积极推动国内e-Navigation 相关产品和产业发展,提升我国航海、航运的科技水平。
[1] IMO. E-navigation[EB/OL]. [2012-10-04]. http://www.imo.org/
[2] IMO. IMO news issue[EB/OL].[2010-03-10]. http://www.imo.org/mediacentre/newsmagazine
[3]IALA.E-navigation Frequently Asked Questions[EB/OL].[2011-09-13].FAQhttp://www.iala-aism.org/
[4]程琳娜.E-Navigation 与eLoran 实例[Z].情报参考,中国电子科技集团公司第20 研究所信息保障中心,2009.
[5]张铁军,朱勇强.E-Navigation 环境下ECDIS 发展研究[J].中国海事,2012 (1):48-51.
[6]徐忠,万载东.AIS 电文解析技术研究[J].江苏船舶,2012,29(1):20-22.
猜你喜欢
数学杂志(2022年5期)2022-12-02
湘潭大学自然科学学报(2022年2期)2022-07-28
新世纪智能(数学备考)(2021年5期)2021-07-28
中学生数理化·八年级物理人教版(2020年11期)2020-12-14
中学生数理化·八年级物理人教版(2018年4期)2018-06-27
中国惯性技术学报(2017年1期)2017-06-09
百科探秘·航空航天(2016年9期)2016-12-01
舰船科学技术(2015年8期)2015-02-27
太空探索(2014年1期)2014-07-10
环球时报(2012-03-13)2012-03-13