
基于虚拟现实技术的三自由度上肢康复机器人系统
2013-05-08 23:32秦江伟贾晋杰李成求
机电产品开发与创新 2013年6期
秦江伟,贾晋杰,李成求
(大连海事大学 装备学院,辽宁 大连 116026)
0 引言
目前,脑中风在我国对中老年人群的健康和生命安全造成的危害十分严重。传统的康复治疗主要局限于治疗医师对患者一对一的物理治疗,虽然治疗医师的经验能够很好地帮助患者的康复,但是这种方法康复周期长、耗费人力且不能合理保证康复训练的强度,同时康复治疗过程过于单调、枯燥,患者很难产生兴趣,难以保证康复治疗达到理想的效果。机器人技术和虚拟现实(Virtual Reality,VR)技术引入康复领域能够有效解决上述缺陷,为患者建立合理的康复治疗系统,提高康复训练的科学性[1]。
基于虚拟现实技术的康复机器人得到了各国研究者的普遍重视,并取得了一定的进展,如日本大阪大学Junji Furusho等设计的6自由度上肢康复装置[2]、美国麻省理工学院的MIT-MANUS机器人[3]、苏黎世大学Tobias Nef等人研制的ARMin机器人[4,5]等。
目前,不少科研工作者研制基于外骨骼式的上肢康复机器人,外骨骼式康复机器人关节与人体关节一致,但是由于其穿戴在肢体上会造成患者心理上的束缚性和不安全感,不利于患者的康复,而作者研制的机器人具有更大的活动空间,增加了可操作性,同时该设计能够实现左右臂的交互康复训练,与外骨骼式的单臂训练方式相比,既经济又实用。
1 系统结构
上肢康复机器人的整体实现系统如图1所示,该系统实现以患者为主动的训练模式(后期会增加伺服电机,实现主被动结合的训练模式),患者操作机器人末端手柄实现计算机屏幕上的游戏,3个绝对式编码器检测机器人各轴旋转方向和位置,数字信号处理器(DSP)和解码电路会处理绝对式编码器的正交脉冲信号,DSP处理信号后与计算机进行串行通信控制虚拟环境中的对象模型,当对象模型运动受限后计算机会通知DSP控制磁粉制动器使轴制动或受到负载,使患者受到力的反馈。

图1 整体系统结构图
2 机器人结构设计
考虑到机器人结构设计的复杂性和成本问题,而且肩部的屈/伸、肩部的外摆/内收和肘部的屈/伸是人体上肢运动最基本的3个自由度,作者设计了能够实现该3个自由度在空间一定范围运动的机器人,整体结构如图2所示,其主要包括:支撑和固定系统的基座,患者做康复训练实现各自由度运动的连杆机构和3重轴,固定在基座上的控制结构。

图2 机器人整体结构
图3是该康复机器人运动原理图,从上向下依次能够实现肩部外展内收运动,肘部的屈伸运动,肩部的屈伸运动。
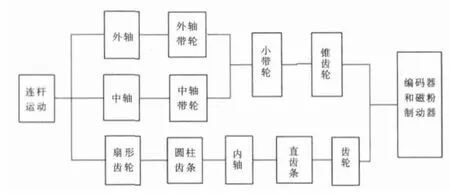
图3 机器人运动原理图
2.1 连杆结构
连杆结构共由六根连杆构成,彼此通过连杆轴结合在一起,在连杆轴两端配有轴承,使其能够自由转动,同时由于本系统的设计在竖直方向上运动范围有限制,设计时采用了扇形齿轮,通过该齿轮和圆柱齿条的配合,能够有效地保障系统在上下运动时的高度,如图4所示,其中黑色箭头为连杆结构空间运动坐标系,绿色箭头为患者进行康复训练时的运动方向(左右运动实现肩部的外展/内收,上下运动实现肩部的屈/伸,前后运动实现肘部的屈/伸)。

图4 连杆结构
2.2 传动结构
在传动结构中,采用绝对式编码器和磁粉制动器控制连杆结构的空间运动。绝对式编码器每个格雷码唯一对应一个绝对位置,在遇到停电、干扰等问题时不会受到影响,能够得到准确的位置信号。磁粉制动器利用磁粉间的作用力代替摩擦片间的作用力来传递制动力,具有结合平稳、响应快、无结合冲击等特点,保证了患者在主动运动过程中的安全性和可靠性。
在设计时为了实现空间的自由运动,采用了三重轴,彼此通过轴承相连,使其在运动时互不干涉。通过增加相应的平衡块,保证整个连杆结构在平面内的有效运动,如图5所示。
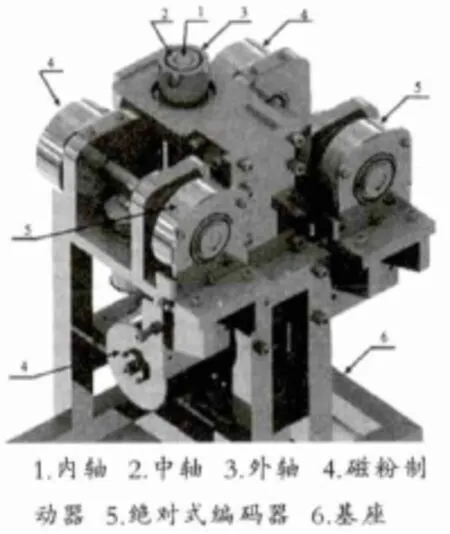
图5 传动结构
3 机器人控制系统
系统控制单元采用DSP芯片TMS320LF2407A,我们知道3个绝对式光电编码器输出正交编码脉冲,而DSP2407A具有两个QEP正交编码模块,能够很方便地测出两个轴的位置、方向信号,为了解决DSP与第3个编码器的接口问题,利用HP公司的HCTL2016解码芯片组成解码电路与DSP的数据总线接口相连。其次,利用DSP的PWM脉冲信号驱动磁粉制动器,但由于信号太弱,采用IR2110组成驱动放大电路。
DSP与计算机之间的通信采用异步串行通信。由于TMS320LF2407A的串行通信接口SCI引脚信号电平为TTL电平,而PC机串口的异步串行通信基于RS-232标准,二者互不兼容,因此在两者之间采用基于RS-232标准的驱动芯片MAX232,同时因为TMS320LF2407A采用+3.3V供电,而MAX232采用+5.5V供电,所以在两者之间采用TI公司提供的典型电平匹配电路,具体的控制流程如图6所示。
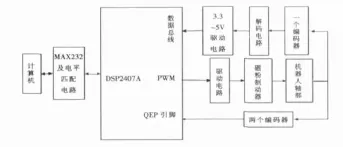
图6 控制系统结构图
4 虚拟现实系统
相关研究表面,与被动运动相比,主动运动更有利于促进瘫痪肢体的康复[6]。虚拟现实技术[7]是融合了计算机仿真、图形显示技术和传感器技术等的一种高新技术,通过它能够建立多感官刺激的虚拟环境,在该环境下进行人机交互是提高患者主动性的一种很好的方法。

图7 游戏界面
在VC++6.0环境下,采用OpenGL(开放型图形库)构建了虚拟现实环境。针对3自由度的上肢康复机器人,作者设计了一款控制小球运动的游戏,如图7所示。
具体实现方法:灰色小球代表了机器人末端手柄,当患者操作手柄做运动时,小球也做同样的运动。训练时既可以控制小球在地面运动也可以将小球从地面拿起并依次放到不同木柱的顶部。在该环境下,当控制小球在地面上运动时,如果碰到木柱或四周墙壁就会停止,患者会受到力的作用而必须控制手柄改变小球运动方向。小球具有一定的重量,当拿起小球时,握住机器人末端手柄的手会受到力的反馈,当把小球放到木柱顶端时,反馈力消失。
在虚拟环境中,小球由OpenGL绘球函数glutSolid-Sphere()获得,通过glTranslatef()函数参数的变化来不断移动小球的位置。墙壁、地面和木柱由绘制四边形法glBegin(GL_QUADS)获得。关于小球与长方体碰撞后停止需要用到OpenGL中的实时碰撞检测技术,同时还应用了纹理贴图技术,将图片(.bmp格式)贴于各图形表面,增加了环境的真实感。
5 结论
基于虚拟现实技术的3自由度上肢康复机器人能够很好的弥补传统康复治疗的不足,尤其是提高患者的主动性方面,是一种有效、科学的治疗系统,是工程技术和康复领域结合的一个全新的研究和应用方向,同时该系统功能能够不断的进行扩展,如利用互联网技术实现远程康复等,对脑中风偏瘫患者的康复具有积极的影响。
[1]胡宇川,季林红.从医学角度探讨偏瘫上肢康复训练机器人的设计[J].中国临床康复,2004,34.
[2]Furusho Junji,Li Chengqiu,Yamaguchi Yuhei.A 6-DOF Rehabilitation Machine for Upper Limbs including Wrists Using ER Actuators[Z].Proceedings of the IEEE InternationalConferenceon Mechatronics and Automation.Niagara Canada,July 2005.
[3]Krebs HI,Volpe BT,Aisen ML.Increasing productivity and quality of care:Robot-aided neurorehabilitation[J].Journal of Rehabilitation Research and Development,2000,6.
[4]NefT,RienerR.ARMin-design anovel armrehabilitation robot[Z].Proceedingofthe9thIEEEConferenceonRehabilitationRobotics.2005.
[5]Nef T,Mihelj Matjaz,Riener Robert.ARMin:a robot for patientcooperative arm therapy[J].MEDICAL&BIOLOGICAL ENGINEERING&COMPUTING(2007)45.
[6]马维艳.运动意念对脑卒中患者康复的作用[J].中国临床康复,2002,7.
[7]李会军,宋爱国.上肢康复训练机器人虚拟建模技术[J].中国组织工程研究与临床康复,2007,44.
猜你喜欢
石油矿场机械(2022年3期)2022-06-17
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
装备制造技术(2020年2期)2020-12-14
动漫界·幼教365(中班)(2020年8期)2020-06-29
家教世界·创新阅读(2020年4期)2020-06-03
家教世界(2020年10期)2020-06-01
成都信息工程大学学报(2018年3期)2018-08-29
汽车实用技术(2017年16期)2017-09-21
电子器件(2015年5期)2015-12-29
电测与仪表(2014年13期)2014-04-04
