
增程式城市电动客车动力系统设计及仿真研究
2013-05-08 09:56尚江华曹东江
河北省科学院学报 2013年3期
尚江华,曹东江
(1.中国电子科技集团公司第五十四研究所,河北 石家庄 050081;2.北京理工大学 机械与车辆学院,北京 100081)
0 引言
由于当前车载动力蓄电池的容量有限,纯电动汽车在其一次充电可实现的续驶里程还达不到燃油汽车一次加油所能行驶的里程[1]。为了延长纯电动续驶里程,在纯电动汽车动力结构的基础上再辅以动力辅助装置,类似于插电式混合动力汽车(PHEV)的APU,由燃油发动机和发电机组成,这里我们称它为增程器(Range Extender,RE),动力电池组和增程器一起构成车辆的主、辅能量源,这种新的纯电动汽车模式被称为——增程式电动汽车(Extended-Range Electric Vehicle,E-REV),在纯电动汽车动力框架的基础上,增程器(Range Extender,RE)作为辅助能量源既能够直接发电驱动电机满足车辆行驶要求,又可以给车载动力电池组充电间接为车辆行驶提供动力源。当动力电池组电量充足时,汽车以纯电动模式行驶;当纯电动汽车的动力电池电量不足时,RE单元开始工作,从而显著的增加电动汽车续驶里程[2],满足长距离行驶的需求。
本文介绍了E-REV的动力系统结构配置及增程原理;根据既要满足车辆动力性能指标,又要延长续驶里程的要求,对E-REV主要动力部件参数进行了匹配设计;最后在搭建的MATLAB/simulink仿真平台上进行分析验证。
1 E-REV动力系统及性能指标
1.1 E-REV 动力系统结构
E-REV动力系统如图1所示。与纯电动汽车相似,E-REV的驱动子系统主要包括动力蓄电池组,增程器(RE),电控单元、功率转换器、驱动电机、机械传动装置和驱动车轮。蓄电池作为主动力源,应能保证车辆的动力性能、吸收制动回馈能量和提供一定的纯电动续驶里程;RE系统与动力电池组并联,为蓄电池充电提高其SOC值,或者直接驱动车辆行驶来满足续驶里程要求;由于电机是E-REV唯一的动力驱动装置,因此电机功率及驱动转矩必须满足单独驱动车辆的设计需要[2]。
E-REV增程的原理是:一方面系统对动力电池组的SOC值进行实时监测,根据控制策略和行驶里程要求确定是否启动增程器(RE)提供辅助功率驱动车辆行驶;另一方面通过制动能量回馈系统,动力电池组回收当车辆减速或制动时的部分动能,从而延长续驶里程[3]。

图1 E-REV动力系统结构图
1.2 整车参数和技术指标
笔者所研究的增程式城市客车,整车参数如表1所示。整车设计技术指标如表2所示。

表1 增程式城市客车整车参数

表2 增程式城市客车设计指标
2 车辆动力总成参数设计
2.1 驱动电机参数匹配
做为增程式城市客车的唯一动力驱动装置,驱动电机的参数选择应满足整车动力性能的设计要求,以下根据客车设计性能指标来具体确定的电机的特征参数及其范围,主要包括:电机最高转速和额定转速,电机最大转矩和额定扭矩、电机峰值功率及额定功率等[1]。
2.1.1 最高转速nmax和额定转速n0
由关系式

这里取nmax=3000r/min,汽车最高时速达到93.6km/h.
基速比β通常取值为2~5,这里取4,由n0=nmax/β=750r/min
因此取电机最高转速和额定转速为3000r/min和750r/min.
2.1.2 最高车速工况
车辆以最高速度巡航时,车辆需要克服滚动阻力和风阻,这时需要驱动电机功率及计算公式为:

式中,m为整车质量kg;f为滚动阻力系数;vmax为最高巡航车速km/h,CD为空气阻力系数,A是客车迎风面积m2,ηT为动力系统传动效率。
2.1.3 最大加速度工况
按照设计指标要求,在不大于20s的时间内车辆速度能从零加速到50km/h,平均加速度是0.7m/s2。电机功率公式为:

式中,δ为质量旋转系数;vf为车辆加速最终速度km/h;vb为车辆加速起始速度km/h;
由于上面公式中系数δ不好确定,可以按照平路上车辆加速到50km/h瞬时,加速度仍为0.7m/s2,车辆需要克服滚动阻力、风阻、加速阻力 ,计算所需驱动电机最大功率为:

式中,a为最大加速度,m/s2。
2.1.4 车辆最大爬坡工况
这时车辆克服阻力有:滚动阻力、风阻、最大爬坡阻力,假设此时车速10km/h,驱动电机需求功率公式为:
式中,α为最大爬坡角度。
2.1.5 车辆爬坡起步加速工况
这时车辆克服阻力有:滚动阻力、风阻、加速阻力及爬坡阻力,假设速度为10km/h,加速度为0.2m/s2,驱动电机功率计算公式为[3]:

2.1.6 电机最大转矩
驱动电机最大转矩Tmax的选取需满足汽车最大爬坡度要求:

式中,imax为传动系统最大传动比,r为轮胎半径。当电机额定转速n0确定后,电机最大转矩满足:此时需要P为254kW。e,max5
2.1.7 峰值功率和额定功率
考虑车辆在满足爬坡、加速及最高车速等各种工况的极限性能的前提下,对驱动电机的最大功率和最大转矩的要求,驱动电机的峰值功率为:

因此,电机额定功率取124kW,按照过载系数2.2匹配,其峰值功率为272.8kW,满足车辆性能要求。综上计算分析,可得电机特征参数如表3所示。
2.2 增程器参数选择
如前所述,增程器(RE)由燃油发动机、发电机及控制器构成,其中发动机功率大小影响整车续驶里程及其燃油经济性。
从车辆行驶特性分析,发动机的功率过小,增程器的作用达不到车辆增加续驶增程效果,车辆有大功率要求时会使电池组迅速放电,对电池组寿命不利。发动机功率过大时候又影响车载动力结构布局平衡,对其燃油经济性不利。
研究表明,典型城市工况下,客车平均需求功率为20~30kW[3]。因此,综合考虑,发动机功率按车辆巡航速度30km/h计算:

式中,ηf为发电机效率;ηe为驱动电机效率。
综合以上分析,燃油发动机参选择数如表4所示。

表4 增程器燃油发动机参数
增程器发电机组的选择应与发动机较好的匹配,两者功率相近,且尽可能使两者的转矩/转速高效率区较大面积的重合。发电机的功率选为45kW
2.3 动力电池组参数选择
电池组作为主动力源,要有足够的容量保证车辆的动力性能,吸收制动回馈能量和提供一定的蓄电池纯电动续驶里程。但是对于EREV,电池容量越大,其质量、体积也越大,对车辆的动力性能和结构布局不利。
综合上述要求选择电池组比能量、比功率比较高且目前广泛使用的锂离子电池,组成动力电池组,其单体容量100Ah,单体额定电压为3.6V,4节单体并联容量是400Ah,还需确定电池组串联节数nbat。
根据驱动电机最大功率和设定的纯电动汽车续驶里程来计算蓄电池组功率容量和能量容量。
动力蓄电池功率容量PB:

动力蓄电池能量容量E[4]:


式中,P为汽车以巡航速度Vn行驶时所需功率;S为巡航里程;ηe为电动机效率0.85。
电池的能量计算公式为:

式中,Wess为电池组实际能量/kWh;nbat电池串联节数;Umodel电池单体电压/v;C单体电池的容量/Ah;
因此电池个数按能量关系须满足如下不等式:

式中Wroad为汽车以纯电行驶里程S所需的路面能量/kWh,Wroad=Pt.ηdis为电池放电系数。
按放电电流0.7C(1-0.3)C=0.7C,则有


式中Pb,max为单个电池最大功率。最大放电电量取5C。
所以最后确定电池个数,n为103节,4节单体并联后103节串联,总容量400Ah,总电压370.8V,总重量0.9t。具体参数如表5所示。
同样由动力电池组功率容量PB得nbat应满足:

表5 动力电池组参数
3 E-REV仿真验证及结果分析
3.1 系统的仿真平台
采用matlab/Simulink仿真平台,根据上述所确定的增程式动力系统设计参数,建立EREV车辆模型,其中主要模块包括驾驶员模型,电池组模型,整车能量管理控制器模型,发动机发电机组模型,电机模型、整车模型,及制动能量回馈模型等,如图2所示[5]。利用模型对系统的动力参数设计结果进行仿真验证和分析。
3.2 控制策略
为了综合考虑E-REV电动汽车的续驶里程和燃油经济性,在整车能量控制策略上以使用电能作主,燃油为辅,工作模式分成三种:纯电电量消耗模式、电量维持模式(根据需求功率大小发动机工作在经济工作点或者高负荷工况点),制动能量回馈模式。车辆开始行驶时,主要工作在纯电电量消耗模式,同时车辆系统控制器监控电池组的SOC值和车辆需求功率。当电池SOC值低于0.3时,整车控制器控制电池停止放电,启动增程器(RE)发电驱动车辆行驶,同时如有能量剩余,给电池组充电维持其SOC值在设定值。
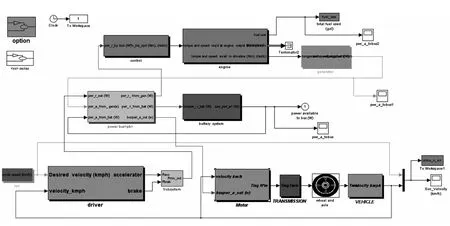
图2 E-REV车辆模型
这时候如果车辆需求功率较小,增程器(RE)工作在发动机的最优经济工作点(燃油效率最高点);如果车辆需求功率高于发动机高效功率点,发动机和电机系统工作在发动机最大功率点(高负荷工况点)。经过标定,增程器发动机万有特性图可知发动机的工作点如表6所示。当车辆制动时候,E-REV仿真模型通过制动能量回收系统,回收部分制动能量到电池组中[3]。

表6 发动机工作点
3.3 E-REV续驶里程仿真结果
E-REV实际续驶里程与其控制策略工作模式和实际工况有关。为了验证E-REV实际续驶里程,在不同工况下,分别对E-REV运行两种工作模式,然后进行仿真计算。
3.3.1 E-REV纯电量消耗模式续驶里程的仿真
在Simulink仿真环境下,在China(中国城市工况)、CYC_1015、UDDS工况下运行E-REV模型,增程器不工作,使整车运行在纯电量消耗模式,在每个工况运行结束后记录动力电池SOC变化量,通过下面公式计算出车辆纯电动行驶里程。

其中:Spe为纯电动行驶里程;Scyc为每个工况循环行驶里程;ΔSOC为行驶每个工况循环后SOC变化量。放电深度为0.7,仿真计算E-REV模型纯电动行驶特性如表7所示。仿真结果表明,在纯电动工作模式下所设计的E-REV实际续驶里程略大于90km,满足表2提出的相关设计指标。由于制动能量回馈的原因,可能其实际续驶里程要比设计指标略高[6]。

表7 E_REV纯电动续驶里程
3.3.2 电量维持模式下增程续驶里程仿真
在Simulink仿真环境下,修改控制策略,让电池的SOC初始值为0.35并且在狭窄的0.4~0.3范围变化,当SOC低于0.3时候,增程器(RE)启动,驱动车辆行驶及给电池提供充电,当SOC高于0.4时,发动机关闭。此时E-REV运行在电量维持模式。在这种策略和CYC_China城市工况下,运行E-REV模型可以确定车辆实际所能达到的增程里程[7]。相关数据如表8所示。

表8 车辆增程里程特性表
3.3.3 仿真结果
根据上述仿真计算,可以得到具有前述动力系统设计参数的E-REV动力性能仿真结果。以UDDS工况为例,如图3所示,从结果可以看出,在电量消耗阶段,仿真车速能较好地跟踪工况车速。E-REV动力参数能够满足在UDDS工况下的整车动力性能要求,其最高车速超过90km/h,最大加速度1.475m/s2等,在电量维持阶段增程器供电车辆能维持超过30km/h的平均巡航速度。
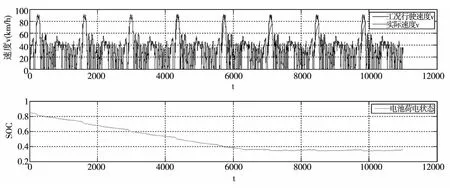
图3 在UDDS循环工况下E-REV仿真结果
4 结论
增程式纯电动汽车(E-REV)采用了特殊的纯电动模式,其配置的增程式发动机发电机组以弥补普通纯电动汽车续驶里程不足的缺点。本文以E-REV整车动力性能指标要求为前提,分析设计了其动力系统的主要参数,在此基础上,利用matlab/Simulink平台建立E-REV整车模型进行仿真分析验证。从仿真结果可以看出,E-REV动力参数能够满足整车动力性能指标要求;所设计和匹配的增程式纯电动汽车,在电量消耗和电量维持控制策略下既能发挥纯电动汽车使用成本低的优点,又能满足长距离行驶的要求,其续驶里程明显增加,说明设计增程器的设想及与相应控制策略的配合是成功的。
[1] 周苏,牛继高,陈凤祥,等.增程式电动汽车动力系统设计与仿真研究[J].汽车工程,2011,33(18):924-929.
[2] 宋珂,章桐.增程式纯电驱动汽车动力系统研究[J].设计·计算·研究,2011,7:14-18.
[3] 李涛,陈猛.增程式公交车动力系统设计及实例化研究[J].中国机械工程,2011,22(14):1759-1763.
[4] 曾小华 军用混合动力轻型越野汽车动力总成匹配及控制策略研究[D].吉林大学,2002.
[5] Cao Dongjiang,Sun Fengchun,Lin Cheng.Study on Forward Simulation Model for Extended-Range Electric Bus[J].IEEE 2012Third World Congress on Software Engineering.2012,11,202-206
[6] 喻皓.基于Cruise的增程式纯电动汽车仿真匹配分析[J].机电工程技术,2010,39(08),28-30.
[7] 李涛.增程式城市公交客车动力总成系统研究[D].昆明理工大学,2012.01.
猜你喜欢
汽车实用技术(2022年4期)2022-03-07
汽车工程师(2021年11期)2021-12-21
北京第二外国语学院学报(2021年2期)2021-08-13
防爆电机(2021年1期)2021-03-29
汽车实用技术(2020年2期)2020-02-25
消费导刊(2017年19期)2017-12-13
汽车文摘(2017年5期)2017-12-05
汽车文摘(2017年10期)2017-12-02
电源技术(2015年11期)2015-08-22
电源技术(2015年9期)2015-06-05
