
温度补偿的FBG式飞机驾驶杆力传感器*
2013-04-30 09:00杨德兴许增奇姜亚军
传感技术学报 2013年3期
张 铭,杨德兴,许增奇,姜亚军
(西北工业大学理学院,陕西省光信息技术重点实验室,教育部空间应用物理与化学重点实验室,西安710072)
飞机驾驶杆是飞行控制系统中重要的操纵部件,飞行员通过驾驶杆操控飞机,使飞机执行各种飞行动作[1]。现有飞机驾驶杆力传感器大多采用电传方式,其固有缺陷是难以防御雷电、电磁冲击和电磁干扰。这些缺陷主要还是通过屏蔽方法加以防护。即使如此,也难以完全防止电磁干扰,而且还占用了飞机内部宝贵的空间、增加了飞机载荷,这不利于提高飞机性能[2]。
光纤布拉格光栅(FBG)式飞机驾驶杆力传感器[2]与传统的电传式杆力传感器相比具有许多优势,包括高可靠性和稳定性、抗电磁干扰和耐受电源波动、适应机载严酷环境条件的能力等[3],而且其体积小重量轻,能够满足驾驶舱内狭小空间的要求。
本文将FBG与正交关联平行梁相结合,利用关联平行梁具有的应变分布特性,消除FBG对应变和温度的交叉敏感问题[4-13],提高传感灵敏度,并实现30~80℃温度范围的杆力传感。
1 理论分析
如图1所示,驾驶杆力传感器的弹性元件由一对首尾相连的正交关联平行梁B1和B2组成。将飞行员作用于驾驶杆的操纵力定义为纵向力(x轴)和横向力(y轴),它们分别与关联平行梁B1和B2垂直[14]。
对于关联平行梁,其简化后的力学模型如图2所示。由于作用力F在关联平行梁上引起的位移极小,因此可按超静系统分析,其弯矩分布如图3所示[15-17],其中
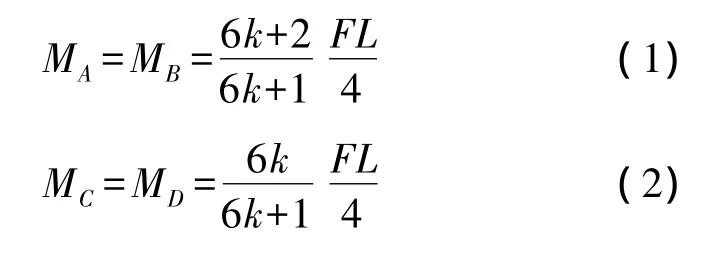
式中,k为平行梁和垂直梁的刚度比,L为平行梁的长度。
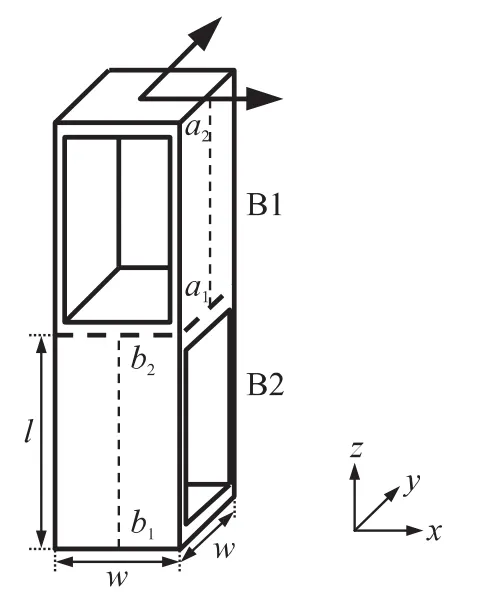
图1 弹性元件结构图
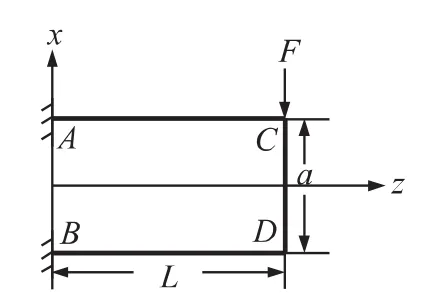
图2 简化模型
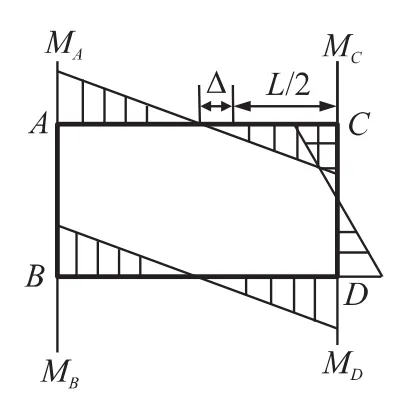
图3 平行梁弯矩图
当k值很大时,平行梁上弯矩的零点趋近于中点。同时
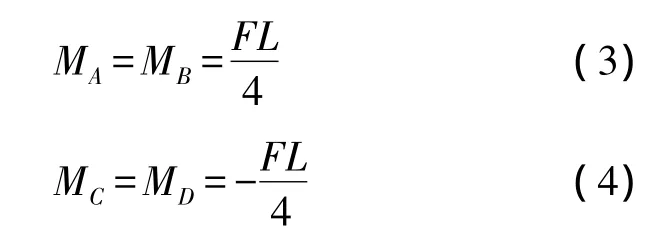
由此可得当k值较大时,一个梁表面上的弯矩如图4所示。
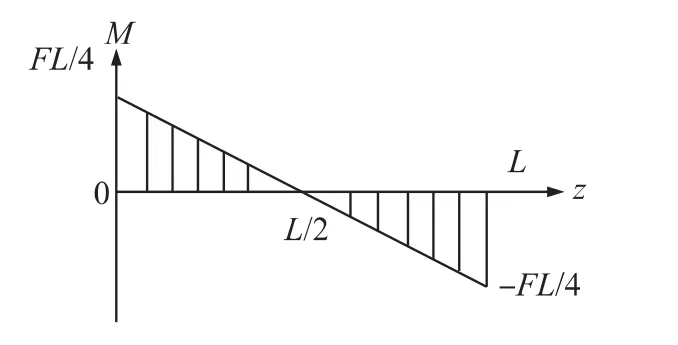
图4 大k值时平行梁弯矩图
由式(3)、(4)及图4可得距平行梁固定端面z0处截面上的弯矩

因此,该处的轴向应变为

式(6)表明,关联平行梁表面的应变与位置z0成线性,且在梁的中点(L/2处)两侧应变大小相等,符号相反。因此,如果在中点两侧分别对称粘贴一只FBG,则当梁受力发生变形时,两只FBG的波长漂移方向相反,漂移量相等。如果在传感过程中温度发生变化,则两只FBG受温度影响的波长漂移方向和漂移量相同。利用这一特性,将两只FBG的波长漂移量相减即可消除环境温度变化对FBG传感信号带来的影响。
由文献[2]理论分析可知,飞机驾驶杆有四个受力方向(如上所述的纵向力和横向力),当外力作用在其中任一方向上时,由于与作用方向平行的平行梁刚度很大,其轴向应变几乎可以忽略不计,所以外力主要使与作用方向垂直的关联平行梁发生形变。因此,关联平行梁B1和B2对纵向力和横向力独立响应。
2 传感实验
2.1 传感信号分析
利用双关联平行梁受力变形的独立性和应变分布特性,可采用图5所示的FBG布局进行杆力传感。将FBG1、FBG2、FBG3和FBG4顺序连接,其中FBG1和FBG2感应纵向力,FBG3和FBG4感应横向力。
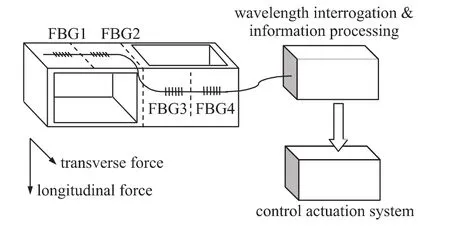
图5 FBG式飞机驾驶杆传感器温度补偿原理图
按照关联平行梁受力后的应变分布特性,纵向力使FBG1和FBG2产生等大、符号相反的波长漂移Δλε1,横向力使FBG3和FBG4产生等大、符号相反的波长漂移Δλε2。由于金属具有良好的导热性,且弹性元件的尺寸并不大,质量仅为0.3 kg,因此,在实际使用过程中可将弹性元件看作等温度元件,温度变化使上述四个FBG产生等大且符号相同的波长漂移量ΔλT。因此,为了消除温度变化带来的影响,可对纵向力引起的波长漂移信号做如下处理

其中,Δλ1和Δλ2为应变和温度同时变化引起的波长漂移总量。则纵向力表示为

其中,ε1为纵向力作用下平行梁弯曲引起的FBG应变,k1为纵向力与FBG应变的传递系数,k2为FBG应变与其波长漂移量的传递系数。
同理,可得横向力的波长漂移信号和横向力分别为

其中,ε2为横向力作用下平行梁弯曲引起的FBG应变,k'1为横向力与FBG的应变传递系数。
由以上分析可以看出,杆力与FBG的波长漂移信号呈线性关系。
2.2 实验结果
将贴有传感器的弹性元件放入自制的温控装置内进行力学加载实验。四只FBG传感器依次串接后接入精度为1 pm的FBG解调仪;实验以30℃为初始温度,每上升10℃记录一组数据,升至80℃时停止;每一温度下,在0~10 kg范围内增加砝码质量,每次为弹性元件加载1 kg的砝码,利用解调仪读取四只FBG的中心波长。
纵向加载情况下,不同温度时杆力传感器的波长漂移量随外力变化的实验结果如图6。其中,图6(a)和(b)分别为温度补偿前FBG1和FBG2的波长漂移量,图6(c)为温度补偿后纵向力引起的波长漂移信号与外部作用力的关系。
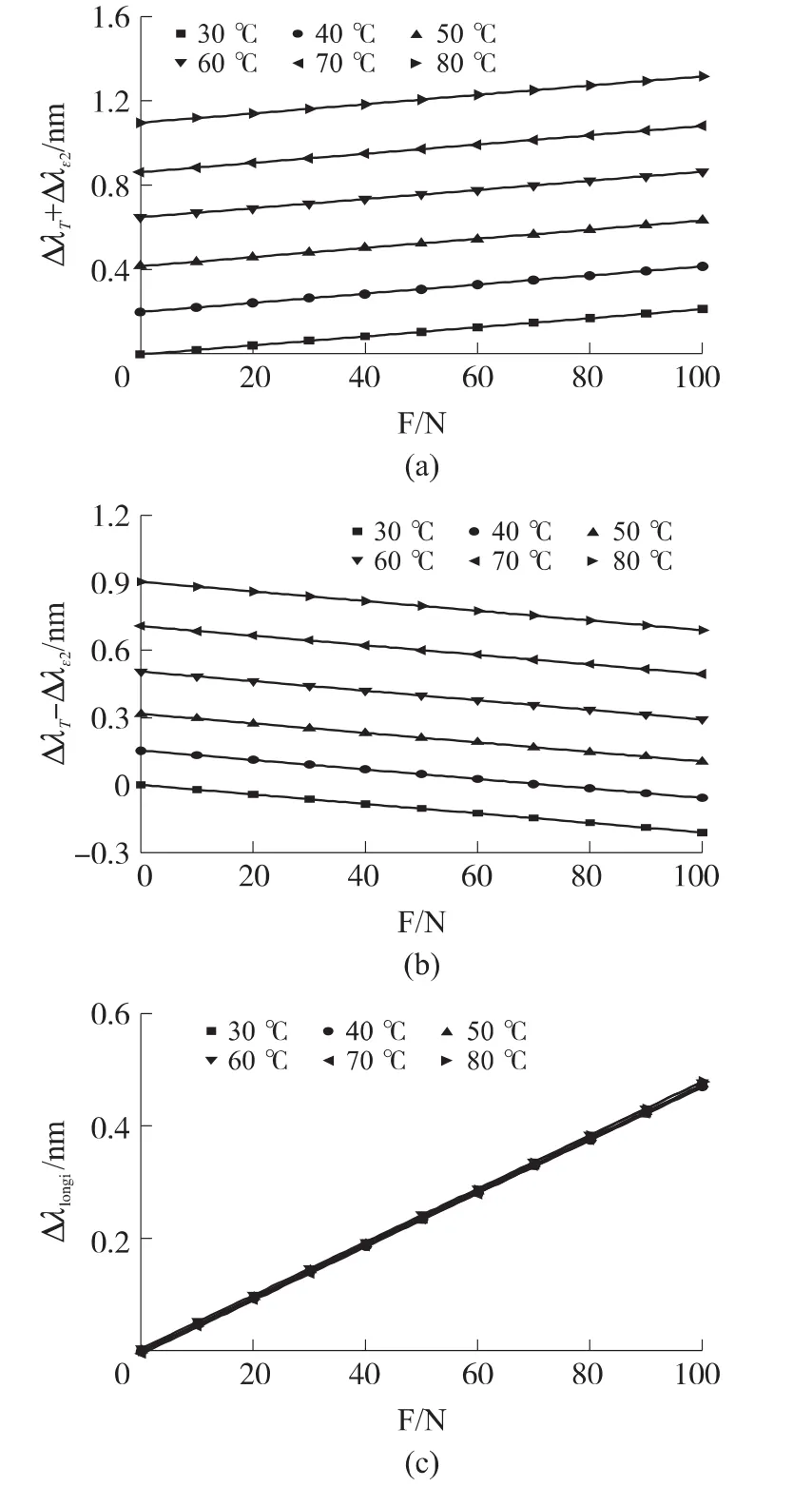
图6 纵向加载温度补偿前后F-Δλ曲线
横向加载情况下,不同温度时杆力传感器的波长漂移量随外力变化的实验结果如图7。其中,图7(a)和(b)分别为温度补偿前FBG3和FBG4的波长漂移量,图7(c)为温度补偿后横向力引起的波长漂移信号与加载力的关系。
由图6和图7的实验结果可知,不同温度下杆力传感器的波长漂移量Δλ与杆力之间呈现很好的线性关系,拟合度达99.99%;传感器的纵向灵敏度和横向灵敏度的平均值分别达到 4.74 pm/N 和5.16 pm/N。
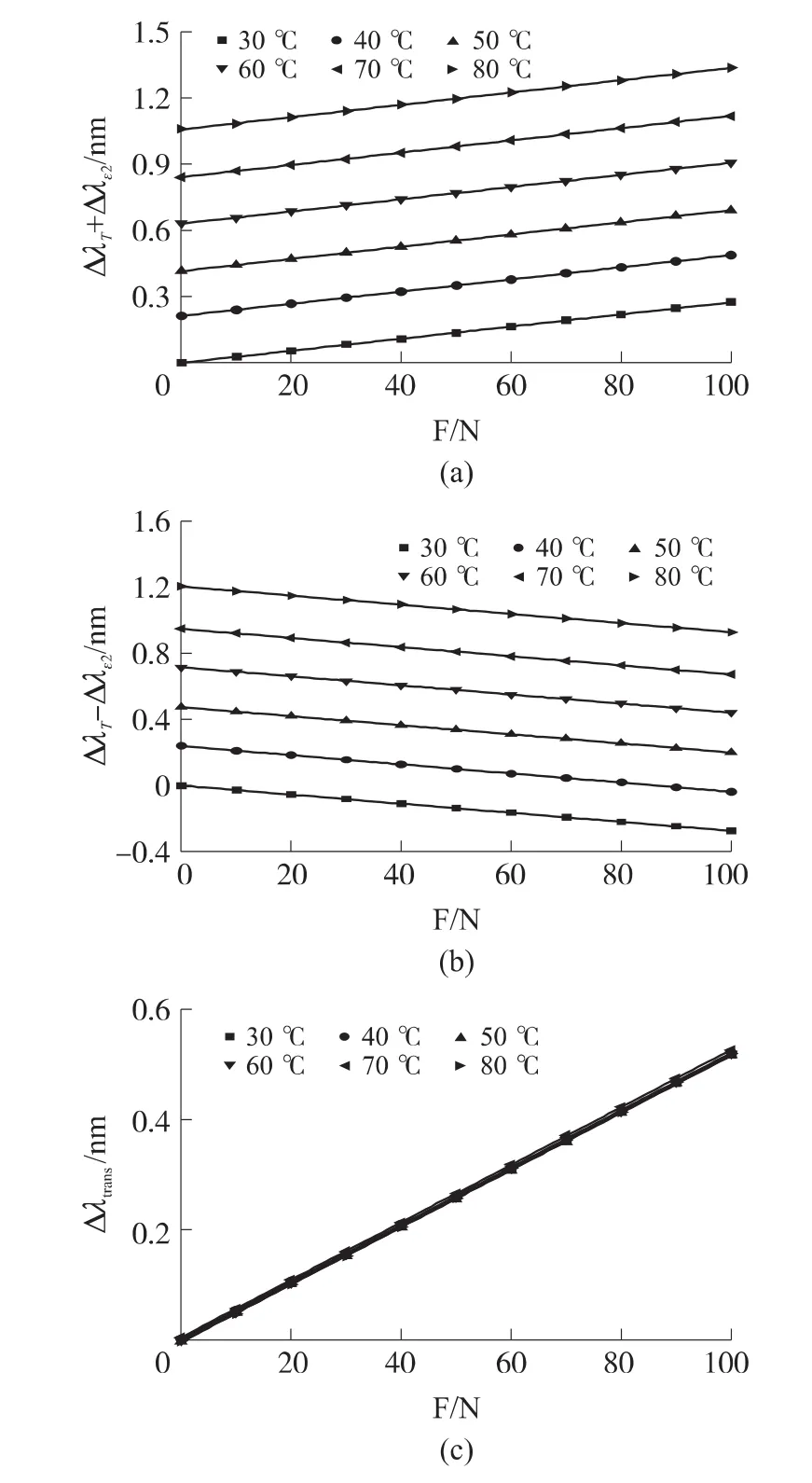
图7 横向加载温度补偿前后F-Δλ曲线
图6和图7中温度补偿后不同温度下F-Δλ曲线的斜率(即灵敏度)略有差异,通过计算得到纵向和横向灵敏度的温度补偿误差分别为0.76%和0.54%。上述误差已经很小,可以认为是实验测试过程中温控装置内温度的微小扰动引起的弹性元件关联平行梁局部温度的微小差异,以及FBG中心波长的测量误差引起的。此外,胶粘剂也可能存在较小的不稳定性。
上述结果表明,在30℃至80℃范围内,温度补偿后的灵敏度误差已达到实用水平。驾驶杆的最大纵向和横向操纵力通常分别为245 N和147 N,由相应的灵敏度可得最大纵向和横向传感信号分别可达1 171 pm和759 pm,由于解调仪的精度为1 pm,因此具有足够的纵向和横向传感信号分辨率。
3 结论
通过理论分析探讨了飞机驾驶杆弹性元件受力后应变分布特征,根据其独特的结构特点设计了基于光纤布拉格光栅(FBG)的飞机驾驶杆力传感器。在30℃至80℃温度范围的实验研究表明,该传感器的杆力响应特性具有很好的线性,线性拟合度达99.99%,传感器的纵向和横向灵敏度的平均值分别达到4.74 pm/N和5.16 pm/N,纵向和横向灵敏度的温度补偿误差分别为0.76%和0.54%。实验结果表明,该杆力传感器可在较大的温度变化范围内补偿因温度变化带来的影响,并可以获得良好的线性和分辨率。
[1]Einthoven P G,Miller D G.Tactile Cueing Experiments with a Three Axis Side Stick[C]//Proceedings of the 57th AHS International Annual Forum,Alexandria:VA.AHS International,2001:235-241.
[2]汤大卿,杨德兴,廖威,等.光纤光栅式飞机驾驶杆杆力传感器的研究[J].光子学报,2010,39(11):1993-1997.
[3]Leung C K Y,Elvin N,Olson N.A Novel Distributed Optical Crack Sensor for Concrete Structures[J].Engrg Fract Mech,2000,65(2-3):133-148.
[4]赵勇.光纤光栅及其传感技术[M].北京:国防工业出版社,2007:24.
[5]Keneth O H,Meltz G.FiberBragg Grating Technology Fundamentals and Overview[J].Journal of Lightwave Technology,1997,15(8):1263-1276.
[6]饶云江,王义平,朱涛.光纤光栅原理及应用[M].北京:科学出版社,2005:161-166.
[7]Yu Y L,Tam H Y,Chung W H,et al.Fiber Bragg Grating Sensor for Simultaneous Measurement of Displacement and Temperature[J].Opt Lett,2000,25(16):1141-1143.
[8]Rao Y J.In-Fiber Bragg Grating Sensors[J].Meas Sci Technol,1997,8(4):355-375.
[9]胡玉瑞,唐源宏,李川.光纤Bragg光栅流量传感器[J].传感技术学报,2010,4(4):471-474.
[10]王昱,李川,胡玉瑞.双孔平行梁光纤Bragg光栅称重传感器[J].光学技术,2008,34(5):678-680.
[11]孙华,刘波,周海滨,等.一种基于等强度梁的光纤光栅高频振动传感器[J].传感技术学报,2009,9(6):1270-1275.
[12]王宏亮,张晶,乔学光,等.一种耐高温光纤Bragg光栅温度传感器[J].传感技术学报,2008,6(3):964-966.
[13]周昌学.光纤F-P传感器频分波分复用方法研究[D].重庆:重庆大学光电工程学院,2006.
[14]中国航空工业总公司航空传感器实用手册编委会.航空传感器实用手册[M].北京:机械工业出版社,1995:415-417.
[15]苟文选.材料力学[M].北京:科学出版社,2005.
[16]杜友民,刘鹏.电阻应变式驾驶杆力传感器的研制[R].中航电测仪器股份有限公司.
[17]姜招喜,王德庆,杨森平.双控平行梁弹性元件力学分析[J].传感器技术,1993,(5):38-40.
猜你喜欢
传感技术学报(2022年7期)2022-10-19
今日农业(2022年15期)2022-09-20
新高考·高一数学(2022年3期)2022-04-28
思维与智慧·上半月(2022年4期)2022-04-08
小哥白尼(神奇星球)(2021年4期)2021-07-22
电子制作(2018年23期)2018-12-26
高师理科学刊(2016年8期)2016-06-15
汽车观察(2016年3期)2016-02-28
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
中国舰船研究(2014年6期)2014-05-14
