基于NSGA-Ⅱ和Cruise的混合动力汽车参数优化
2013-04-16 07:42母洋文杜周勃
汽车科技 2013年3期
饶 阳,刘 平,母洋文,杜周勃
(西南交通大学 机械工程学院,成都610031)
混合动力电动汽车(HEV)具有多种动力源,将电力驱动与内燃机驱动相结合,通过对各部件的优化组合,使发动机工作在低排放和低耗能的区域,从而为能量的优化分配提供了基础[1]。由于HEV系统的参数优化属于不可微、不连续、多维、有条件约束和高度非线性的优化问题,针对这类问题,目前主要有梯度算法和非梯度算法两种。
传统的基于梯度的搜索方法,如序列二次规划法(SQP),要求目标函数连续、可微并满足Lipschitz条件,FISH等应用SQP对串联式HEV参数进行了优化分析,但仅能收敛于局部最优解,而不是全局最优解[2,3]。非梯度算法,如模拟退火算法(SA)、粒子群优化算法(PSO)、遗传算法(GA)等由于不需要目标函数的梯度信息,且能自行跳出局部最优解,可以适用于HEV系统的参数优化[4,5]。遗传算法搜索能力强,具有良好的全局优化性,但容易陷入局部最优解,而且在后期的搜索效率低,所以加入精英策略和快速非支配排序的NSGA-Ⅱ有更好的适应性。
在正向仿真软件AVL Cruise的平台上建立精确的HEV整车分析模型,以降低油耗和排放为目标,通过改进的遗传优化算法NSGA-Ⅱ,对混合动力系统的相关参数进行优化,确定出合适的主传动比及控制策略参数,有效地解决了整车能量分配问题,并在保证动力性的情况下,提高了燃油经济性,同时也改善了排放性能。
1 HEV仿真模型及控制策略
建立仿真模型在混合动力汽车的设计分析中是一种有效手段,本文选用AVL Cruise软件对某混合动力汽车进行建模,并在Matlab中建立能量管理策略。Cruise是AVL公司开发的用于进行车辆仿真和传动系分析的软件。Cruise是研究汽车动力性、燃油经济性、排放性能及制动性能的高级模拟分析软件。它可用于汽车开发过程中的动力传动系的匹配、汽车性能预测,还可以用于开发和优化混合动力车、电动汽车动力传动系统及控制系统。Cruise模型与Advisor最大不同点在于,前者带有驾驶员模型,可以实现正向仿真,与实际情况更接近,使结果更加准确。
1.1 基于Cruise的整车模型
根据实车的动力总成结构,在Cruise平台下搭建整车分析模型,如图1所示。该模型采用的是并联ISG型结构,ISG电机和发动机直接相连,电机可带动发动机实现快速起动。模型中各个模块通过机械连接、电气连接和信号连接来实现数据的交换,其中蓝色的线条代表机械连接,表示车辆实际的机械动力传递,红色的线条代表电气连接,表示电流的传递,信号连接通过数据线的方式来传递。整车的参数如表1所示。

表1 整车基本参数
1.2 能量管理策略
本文的实车模型为ISG型混合动力汽车,该模型中ISG电机既可以用作电动机,又可以当作发电机使用。在此结构下,通常采用的ISG电机功率较小,该结构的混合动力汽车大多采用电动机辅助控制策略。控制策略示意图如图2所示,发动机的最大转矩曲线、关闭转矩曲线和起动转速构成了发动机的起停分界区。当SOC大于下限值soc_low时,在车速低、发动机转速低于起动转速或者需求转矩过低,此时关闭发动机,由电机驱动。当系统需求转矩大于发动机的最大经济转矩时,由发动机和电动机共同驱动。在制动时ISG电机切换到发电状态进行制动能量回收。当蓄电池荷电状态过低时,发动机除提供系统的需求转矩外,还要向发电机提供充电转矩图2(b)中表示充电转矩,来提高电池的荷电状态。

表2 优化参数
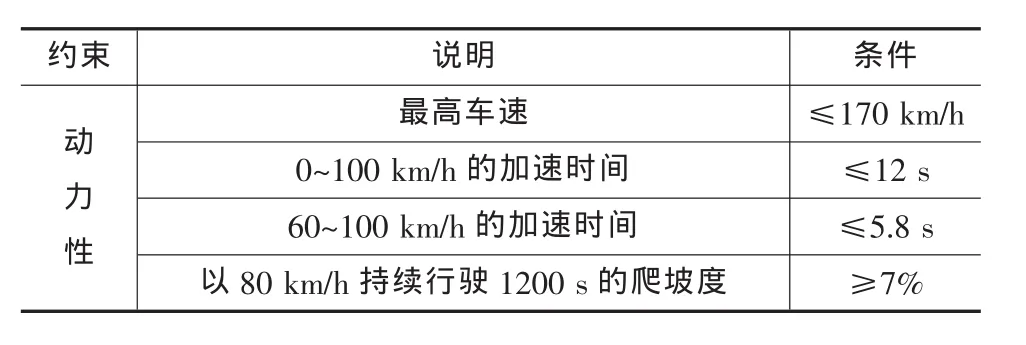
表3 车辆性能约束条件
2 基于NSGA-Ⅱ的参数优化
2.1 优化目标和优化变量
HEV的优化目标是在满足汽车其他性能的基础上,尽可能地减少油耗和降低排放,为了方便优化,将等效油耗作为优化目标。优化目标可表述为有约束的非线性问题。
式中:X为优化参数组成的向量;Ω为可行解空间;为待优化的一个参数;n为参数的个数;gj(X)≥0为约束条件,代表车辆的性能要求,如最高车速、加速时间、爬坡度等;
[ffuel(X),fHC(X),fCO(X),fNOx(X)]为多目标函数,依次是等效百公里油耗,HC、CO和NOx的排放量。
HEV的设计变量有很多,如果对所有的参数进行优化,将是不现实的。因此,只能选取对车辆性能影响较大的参数进行优化。在确定了发动机和电机的功率情况下,选取主传动比及控制策略的相关参数为优化变量。选取的优化参数及其上下界如表2所示。
2.2 约束条件
HEV的优化问题的约束条件主要以满足整车的动力性能为要求,针对某车型提出的一般动力性指标为约束条件,如表3所示。
2.3 NSGA-Ⅱ算法

表4 遗传算法基本参数
采用带精英策略的非支配排序遗传算法(NSGA-Ⅱ)对混合动力汽车参数进行多目标优化,可以得到分布均匀的非劣最优解。该算法提出快速非支配排序算法,降低了算法的复杂度;引入精英策略,扩大了采样空间,避免了优秀个体的流失;并采用拥挤度和拥挤度比较算子,使Pareto最优解的前沿中的个体,能均匀地扩展到整个Pareto域,保证了种群的多样性[6]。本文选用的遗传算法基本参数如表4所示,优化原理如图3,其具体实现步骤如下:
(1)编码。采用实数编码表示设计参数向量。
X=(x1,x2,x3,x4,x5,x6,x7,x8)
(2)初始化,在X的可行域内随机产生N个个体作为初始父代种群Pt。
(3)对初始种群Pt进行简单遗传算法,生成子代种群Qt,将初始种群与子代种群进行合并,生成规模为2N的种群Pt。
(4)快速非支配排序,根据个体之间的支配与非支配关系进行排序以决定个体之间的优劣。
(5)拥挤度比较算子计算,拥挤度是指种群中给定个体的周围个体的密度。
(6)精英策略,通过快速非支配序与拥挤度算子从种群2N中选择N个个体作为下一代父种群Pt+1,然后进行简单的遗传算法产生新的子代种群Qt+1。
(7)检验是否满足结束条件,如果不满足返回步骤(3)继续操作,满足条件则输出结果。
3 实例优化结果分析
应用以上提出的方法来解决混合动力汽车参数优化问题。在Matlab环境下,编程实现多目标遗传算法,并在算法中实现调用Cruise模型进行计算,最终通过循环迭代得到Pareto最优解。实例中选用UDC工况作为仿真工况。
优化得到Pareto最优解,选取其中两组最优的可行解和初始解作对比,如表5所示。
两组可行解分别表示油耗最优解和排放最优解。通过表6的Pareto最优解改善率可以看出,多目标优化方法可以同时优化多个目标函数,表中等效油耗以及HC、CO和NOx的排放都得到了不同程度的改善。
以上结果表明,采用改进的遗传算法NSGA-Ⅱ对混合动力汽车的参数进行优化是有效的。
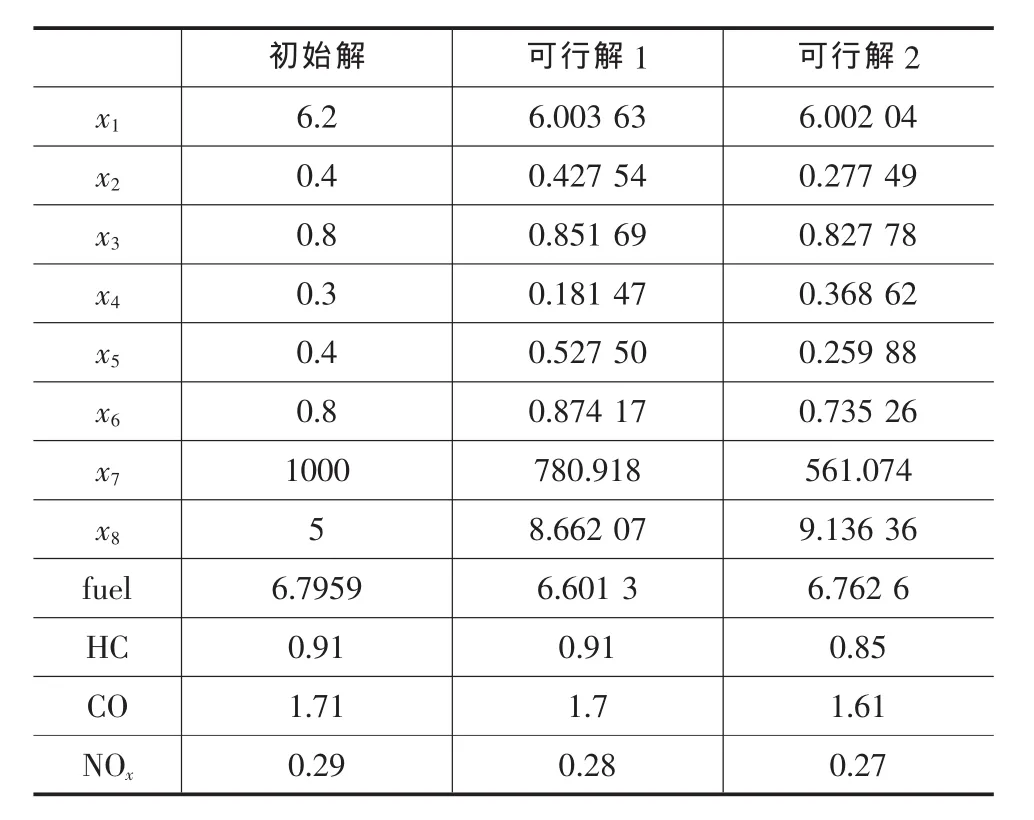
表5 优化前后参数对比

表6 可行解改善率
4 结论
混合动力汽车参数优化是一个典型的非线性多目标优化问题。以油耗和排放为优化目标,通过改进的遗传算法NSGA-Ⅱ对整车的相关参数进行优化。优化结果表明,在保证整车动力性的前提下,燃油经济性和排放性能得到了不同程度的改善,从而验证了该方法有一定的可靠性。但由于Matlab和Cruise的相互调用会影响整个算法的计算速度,所以未来的研究将主要集中在提高算法的优化性能和优化速度。
[1]璩晶磊,杨观赐.混合动力汽车优化算法综述[J].现代机械,2012,2: 27-29.
[2]吴光强,陈慧勇.基于遗传算法的混合动力汽车参数多目标优化[J]汽车工程,2009,31(1):60-64.
[3] FISH S, SAVOIE T B.Simulation-based optimal sizing of hybrid electric vehicle components for specific combat missions [J].IEEE Transaction on Magnetics,2001,37:485-488.
[4]王昕,姜继海,于安才.静液传动混合动力车辆驱动系统优化匹配[J].哈尔滨工业大学学报,2011,43(7): 66-70.
[5]吴剑,张承慧,崔纳新,等.基于粒子群优化的并联式混合动力汽车模糊能量管理策略研究 [J].控制与决策,2008,23(1): 46-50.
[6]尹安东,谌文文,等.基于遗传算法的ISG混合动力汽车参数优化[J].汽车工程,2011,33(10): 834-837.
[7]Piccolo A,Ippolito L,Galdi V,et al.Optimization of Energy Flow Management in Hybrid Electric Vehicles via Genetic Algorithms [C].IEEE/ASME Int.Conf.on Advanced IntelligentMechatronics, Como, Italy, 2001.
[8]张昕,宋剑峰,田毅,等.基于多目标遗传算法的混合动力电动汽车控制策略优化[J].机械工程学报,2009,45(2):36-40.
猜你喜欢
今日农业(2022年15期)2022-09-20
防爆电机(2022年2期)2022-04-26
昆明医科大学学报(2021年12期)2021-12-30
防爆电机(2021年5期)2021-11-04
汽车工程(2021年12期)2021-03-08
电子制作(2019年16期)2019-09-27
电子制作(2019年24期)2019-02-23
生物学教学(2018年3期)2018-08-08
电机与控制学报(2018年9期)2018-05-14
中学生物学(2018年8期)2018-03-01