
GNSS反射信号在土壤湿度测量中的应用
2013-04-07 07:47宋学忠徐爱功杨东凯马小东
测绘通报 2013年11期
宋学忠,徐爱功,杨东凯,马小东
(1.辽宁工程技术大学测绘与地理科学学院,辽宁阜新 123000;2.北京航空航天大学电子信息工程学院,北京 100191;3.北京化工大学信息科学与技术学院,北京 100029)
一、引 言
在地球科学中,土壤湿度的测量是一项很重要的工作,但目前要进行一个连续大区域的测量仍然较为困难。重量水分法、土壤湿度计法、电阻法等常用土壤湿度测量方法虽然很准确,但是将其运用到预报模式中来预防灾害,甚至更深层地理解水循环还远远不够。遥感监测土壤湿度的方法由于具有时效性高、动态对比性强的优点而被运用到土壤湿度的测量上,但利用遥感来监测土壤湿度研究仍然处于发展中[1]。
随着GNSS-R(global navigation satellite system reflection)新技术的出现,开发利用GNSS-R测量土壤湿度炙手可热。它是利用GPS、北斗、Galileo和GLONASS等导航卫星发射的直射信号及经过土壤反射的信号来测量土壤湿度的。GNSS-R技术拥有大量免费的信号源,不需要单独发射机,体积和重量都较小,便于机载和星载的使用,具有时间、空间分辨率高等优点[2]。利用GNSS导航卫星信号经由海面、陆地地表反射面的反射信号,可以进行海面风场、地表湿度、盐碱度、森林覆盖度、生物量等参数的遥感测量、反演和探测,并与其他手段形成互补和验证,提高了海洋、地表环境要素的监测能力。
美国NASA兰利研究中心于1997年8月至10月采用一个12通道可重构的GEC-Plessey GPS软件接收机进行了5次飞行试验。通过试验研究了反射信号相关函数的特性,并发现GPS反射信号相关函数的宽度与反射面的粗糙度有密切的关系,且通过反射信号可以获取海面信息。这就是基于GPS等导航卫星反射信号的遥感技术,被简称为GNSS-R技术的根源。
土壤湿度无源探测技术在国外已经有了多年的研究。NASA于2002年6月至7月在爱荷华州,10月初在新墨西哥拉斯克鲁赛斯地区进行了GPS反射信号的土壤湿度遥感试验[2];西班牙Starlab公司的Egido等人在2008年利用自行研制的Oceanpal接收机采用干涉复数场(ICF)的方法,结合经验公式建立了GPS信号复数波形与土壤湿度的关系,并对土壤湿度的影响因素予以反演[3-5]。而我国也有一定的积累和研究,国内GNSS-R微波遥感对地观测已有多次试验,海洋散射应用试验部分技术渐趋成熟。国内进行GNSS-R研究的领域主要集中在土壤湿度测量、海浪波高和海面风场。厦门实验基地与近海的多次试验屡见报道,内地气象部门也有不同程度的试验[6]。其中,武汉大学和中国科学院武汉物理与数学研究所等单位合作,曾经开展了基于GNSS-R的土壤湿度测量理论和试验研究工作,张训械、严颂华等对这一系列试验进行了报道和应用分析,并将初步试验结果与其他土壤湿度测量数据进行了比较分析,为后续的工作奠定了良好的研究和应用基础。
二、GNSS-R土壤湿度测量基本原理
1.土壤湿度的测定原理
GNSS卫星连续地向广大用户发送导航定位的信号,L波段信号载波频率有GPS的L1(1575.42 MHz)、北斗的B1(1561 MHz)和Galileo的E1(1 575.42 MHz),这保证了对地遥感探测的信号基础。在1~2 GHz微波波段内,介电常数实部适用于由土壤湿度多项式表示的半经验模型[7]

式中,mv代表土壤湿度;s代表土壤中砂的含量;c代表粘土的含量。若能够获取土壤的介电常数,则解方程即可由ε得到mv。
湿土壤复介电常数有

式中,复介电常数的实部ε,反映在两种不同介质表面发生的波的折射和反射现象,与介质的介电特性有关;ε1为复介电常数的虚部,与入射电磁波在介质中的衰减(吸收和转化)有关,通常很小,设定为0.02。
2.土壤介电常数的确定方法
目标区反射的GNSS信号C/A码与直射信号C/A码相关功率峰值的比值能体现反射区域的介电常数。地基GNSS-R遥感观测反射区足够小,可满足菲涅尔地面散射电场模型条件。反射信号水平与垂直极化分量归一化菲涅尔反射系数有[8]

式中,γ为可视卫星的高度角。进而,反射后左旋与右旋极化分量归一化菲涅尔反射系数为

湿土壤的介电常数为8~15[9-11]。取近似值13时,归一化菲涅尔反射系数变化趋势图形可以清晰体现16.4°卫星高度角时的布鲁斯特角,且与海水介质[1]的6.8°的布鲁斯特角差别较为明显。随着卫星高度角的增大(0°~90°),反射信号的右旋分量变小,左旋分量变大。但对不同的介质反射面,其变化的快慢程度有所不同。显然,GNSS信号小角度入射时右旋圆极化反射信号微弱,左右旋极化波区分较为显著。其趋势如图1所示。
3.GNSS-R反射信号
一般而言,GNSS信号如GPS入射信号为右旋圆极化波,其经长距离路径传播和地球近地表层反射后,融合地表散射场,信号能量特性和极化特性均发生改变:入射角度、信号波长、频率、幅值、相位、等信号能量因素发生变化;入射和反射方式、散射模式引起的信号强度以前向散射为主,包含后向散射和侧向散射分量的复杂信号等变化;反射信号成为以左旋椭圆极化分量为主,兼有右旋椭圆极化分量;垂直和水平两个分量因反射系数不同,反射后幅度和相位变化存在差异。GNSS-R的几何结构如图2所示。

图1 归一化菲涅尔反射系数变化趋势

图2 GNSS-R的几何结构
为了同时接收GNSS直射和反射信号,GNSS-R遥感观测应用时至少需要两副天线:一副方向朝天顶,用于接收右旋极化的直射波信号和定位;另外一副方向朝下,用于接收近地表面反射、散射的左旋极化信号。反射信号的强度反映土壤湿度,体现为土壤介电常数测定的不同。由此,可以通过反射信号与直射信号相关功率峰值比值反演出土壤湿度。
进行土壤湿度估计,首先需要计算反射波与直射波相关功率峰值比值,并作为反射信号的归一化功率,即替代反射的左旋极化分量,然后通过卫星高度角和反射信号的归一化功率解算目标区域土壤介电常数为

GNSS-R地基遥感观测时,通常高度有限,接收平台不是移动目标,地面起伏也不会很大。鉴于此,天线只能接收到镜面反射点(specular point,Om)附近区域的反射信号。当地面存在一定粗糙度时,在同一个码延迟的时间内,反射区内不同位置的点、具有不同GNSS信号源的不同延迟反射信号存在干涉现象。调制于GPS载波信号L1波段上的C/A码延迟区变化,表现等延迟线为椭圆环,椭圆的一个焦点即镜面反射点。
反射区域包含在天线覆盖区与等延迟区的重叠部分的较小区域。反射区域与GNSS卫星高度、接收平台高度、卫星高度角和接收天线波束角有关。
图3中左侧中间区域闭合环为天线覆盖区,包含反射区等,即GNSS-R捕获此区域的反射信号。
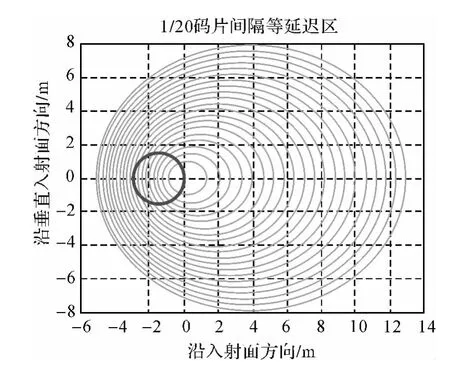
图3 C/A码码片延迟区与反射区
三、土壤湿度测量试验及结果
1.试验概况
2011年10 月中国气象局联合北京航空航天大学,采用北航自主研制的GNSS反射信号接收设备GNSS-R微波遥感器,在山东泰安附近的气象局试验基地进行了地基GNSS-R遥感数据采集试验。试验系统如图4所示,右旋天线方向朝上,左旋天线方向朝下,延迟多普勒映射接收机(delay doppler mapping receiver,DDMR)与任务监控工作站相连接。
GNSS-R接收系统进行GPS等的直射信号和散射信号量化后的原始数字信号采集。系统组成主要由信号接收接收天线、双通道射频前端、采样与量化单元、信号处理后端和任务监控工作站组成。右旋天线为通用GNSS天线接收GPS等的直射信号;左旋天线采用天线阵列设计,波束角38°。

图4 GNSS-R遥感系统
2.数据处理及应用
遥感系统利用反射信号与直射信号相关功率的峰值对土壤湿度敏感这一特征,分析土壤湿度的变化趋势。选取2011年10月9日14∶00至15∶30的数据,该时间段GNSS-R观测的连续可见卫星为PRN17和PRN27(接收反射信号时,相当于天线截止角为71°,如图5所示,因此连续观测可视卫星数相对较少),采用当地的导航定位解及精密星历解算出卫星高度角,进一步利用GPS PRN17号卫星的参数解算土壤介电常数和土壤湿度值。

图5 连续可见卫星高度角趋势图
不同方法的土壤湿度结果如图6所示。由试验结果分析可知:对于湿度计测量的上升趋势都很好地予以体现;传统湿度计人工测量采样率明显不及GNSS-R自动化接收机;GNSS-R数据与湿度计测量数据相比,其归一化功率因子变化趋势不显著,影响反演可靠性;对于湿度计测量间隔内的含水量变化,GNSS-R捕捉很灵敏,部分结果有波动。此外,存在的水面反射对湿度数据有一定的干扰,但此项可以通过数据的后期滤波处理呈现出有效湿度值。

图6 不同方法的土壤湿度结果
四、结束语
L波段是遥感土壤湿度的最佳频段,GPS的L1、Galileo的E1、北斗的B1信号的频率恰好在L波段,为反射信号的研究带来了便利性。土壤反射散射现象比较复杂,难点在于如何更好地理解影响GNSS信号特性的各种因素之间的相互关系,确定GNSS-R反演参数,得到近地表反射率和模型各参数之间的关系。利用现有的和即将出现的更多源的GNSS信号,探索更加经济适用的遥感土壤湿度的方法是有价值的。
GNSS-R能够提供土壤湿度的测量,其测量精度接近土壤湿度计的结果。GNSS-R观测设备应用比较灵活,搭载于地基静态观测、机载、星载等平台的立体化多方位对地观测与遥感有显著优势。近地表面的电磁场散射比较复杂,因地形地貌和土壤介质及结构本身对散射有一定的影响,散射模型、反演模型及数据处理方法仍需进一步深入研究。
[1] 王迎强,严卫,符养,等,机载 GPS反射信号土壤湿度测量技术[J].遥感学报,2009,13(4):670-685.
[2] 关止,赵凯,宋冬升,等.利用反射GPS信号遥感土壤湿度[J].地球科学进展,2006,21(7):747-750.
[3] MICHAEL S G,SCOTT T A.Terrain Moisture Classification Using GPS Surface-reflected Signals[J].IEEE Transactions of Geoscience and Remote Sensing,2007,1(4):41-45.
[4] CHOUDHURY B,SCHMUGGE T,CHANG A,et al.Effect of Surface Roughness on the Microwave Emission from Soils[J].JournalofGeophysicalResearch,1979,84(C9):5699-5706.
[5] EGIDO A,RUFFINI G.Soil Moisture Monitorization U-sing GNSS Reflected Signals[J].IEEE Transactions of Geoscience and Remote Sensing ,2008,7(3):53-56.
[6] 李紫薇.GNSS海洋微波遥感技术与应用进展[C]∥第二届微波遥感技术研讨会摘要全集.深圳:[s.n.],2006.
[7] 杨东凯,樊江滨,张波,等.GNSS应用与方法[M].北京:电子工业出版社,2011.
[8] 王炎,杨东凯,胡国英,等.利用GPS反射信号遥感土地湿度变化趋势[J].全球定位系统,2009,34(5):7-10.
[9] 严颂华,张训械.GNSS-R反射信号在土壤湿度测量中的应用研究[J].电波科学学报,2010,25(2):8-13.
[10] 刘经南,邵连军,张训械.GNSS-R研究进展及其关键技术[J].武汉大学学报:信息科学版,2007,32(11):955-960.
[11] SONG Xuezhong,XU Aigong,YANG Dongkai.Soil Moisture Measuring Application on the Basis of GNSS Reflected Signals[C]∥Lecture Notes in Electric Engineering:China Satellite Navigation Conference 2012 Proceedings.Guangzhou:[s.n.],2012.
猜你喜欢
天津农林科技(2020年3期)2020-08-13
电子制作(2019年15期)2019-08-27
世界农药(2018年6期)2019-01-05
课程教育研究(2018年1期)2018-03-31
电子制作(2017年20期)2017-04-26
高原山地气象研究(2016年4期)2016-02-28
高原山地气象研究(2016年4期)2016-02-28
材料科学与工程学报(2016年5期)2016-02-27
中国塑料(2015年8期)2015-10-14
药学与临床研究(2015年4期)2015-06-05
