一种红外场景仿真系统工作状态寻优方法*
2013-03-20 04:30何永强唐德帅胡文刚
光学仪器 2013年6期
何永强,唐德帅,胡文刚,元 雄,耿 达
(军械工程学院 电子与光学工程系,河北 石家庄 050003)
引 言
目前,红外场景仿真技术已经广泛应用于各种半实物仿真系统中,根据红外图像生成原理不同可以分为直接辐射型和辐射调制型,采用的主要技术有:电阻阵列、光二极管阵列、Bly Cell、液晶光阀、数字微镜器件(DMD)等[1]。其中,基于DMD的红外场景仿真系统以其高图像分辨率、高光效效率以及全数字化控制等优势得到越来越多的重视和应用。它以光源温度可调、显示帧频可调等特点可以适用于多种凝视型红外探测设备。
红外场景仿真系统的最终目的是投影出感兴趣的红外目标和背景信息,为红外成像设备提供信息源。场景仿真系统所产生的红外图像的质量直接关系到仿真实验的效果,因此,选择合适的方法对场景仿真系统的成像质量进行评价具有重要的意义。目前,对场景仿真系统成像质量进行评价的相关研究较少,李卓等人提出了红外场景生成装置的主要技术指标评测体系[2-4],对场景仿真系统进行包括时间特性、空间分辨率、空间均匀性、几何畸变等指标在内的定量评价。为了在实际应用过程中迅速、简洁地确定仿真系统的最佳工作状态,本文提出一种利用客观评价方法,通过采用标准红外成像设备对实物场景进行探测成像,与场景生成器产生的原始图像进行相似度对比,实现场景仿真系统的定性评价,对场景仿真系统进行标定,可以快速确定仿真系统的最优工作状态。
1 系统评价测试指标
通过对红外场景仿真系统成像质量的测试与评价能够对仿真系统的改进和发展提出具体要求,具有学术意义和实用价值。红外场景生成装置的主要技术指标包括:时间特性、空间分辨率、空间均匀性、几何畸变、动态范围、最大辐射功率密度、最小可分辨温差、串扰和辐射对比度等。其中又以均匀性、对比度、几何畸变和空间分辨率最为重要,为图像性能评测中优先考虑的评测指标。
时间特性是描述像元辐射或调制红外辐射通量变化速度的特征量。它的测量主要包括帧频、上升时间、保持时间和下降时间的测量。空间分辨率是指系统单位宽度范围内可识别的线对数,单位是lp/mm。可以用调制传递函数(MTF)表示,表征了仿真系统传递不同频率信号调制度的传递特性,即经过场景仿真系统成像前后像的调制度与物的调制度之比。空间均匀性是指当输入均匀强度分布的图像时,场景仿真系统上不同区域的强度差异。几何畸变反映场景仿真系统生成图像相对于理想图像的变形程度,定义实际图像上某点到图像中心点的径向距离与理想径向距离之差为图像上此点的绝对畸变。绝对畸变与理想径向距离的比值为相对畸变。
上述指标比较全面地反映了场景仿真系统的成像质量,通过对上述指标的测试,可以完整地描述出仿真系统的性能,对仿真系统的改进具有实际的指导意义,但具体测试过程相对复杂,比如,空间分辨率和空间均匀性的测量需要利用点源扫描辐射计逐点扫描得到,其他指标的测量也需要多次重复测量、比较得出,实施起来具有一定的难度。
2 成像质量评价方法
为了在实际应用过程中迅速、简便地确定仿真系统的最佳工作状态,本文提出一种利用客观评价方法。通过采用标准红外成像设备对某一实物场景进行探测成像,然后利用场景生成器模拟实物场景,用红外成像设备对其探测成像;通过调整仿真系统工作参数,得到多幅图像,分别与实物场景所成的图像进行相似度对比,实现对场景仿真系统的定性评价,并对场景仿真系统进行标定。
图像质量评价的方法可以分为两种[5]:(1)主观评价方法:通过设计实验,由观察者对图像质量进行评价;(2)客观评价方法:采用某种算法对图像质量进行评价。其中主观评价方法和人的主观感受联系紧密,但它费时、复杂,对观察者的专业背景要求较高,并且不能结合到其它算法中使用;客观评价方法方便、快捷,但它和人的主观感受有一定出入。通常提到的图像质量评价算法指客观评价算法,其目的是获得和主观评价结果一致的评价值。
由于仿真系统投影的图像是以图像产生器产生的图像为信号源,所以本文利用一款经过标定的标准红外成像设备,对场景仿真系统探测成像,并将所成的像与所仿真的实物场景进行相似度比较,通过多幅图像对比,定性评价场景仿真系统的成像质量。评价系统的原理框图如图1所示。
图像相似度的测量通常是用恢复图像与原图像之间的统计误差来衡量恢复图像的质量,若误差越小,则差异越小。常用的图像逼真度测量参数有平均绝对误差(MAE)、均方误差(MSE)、归一化均方误差(NMSE)、信噪比(SNR)和峰值信噪比(PSNR)[6]。
2.1 平均绝对误差(MAE)
把被评价图像与原始图像各点灰度差的绝对值之和除以图像的大小,其值越小表示与原图像的偏差越小,图像质量越好。计算表达式如下:

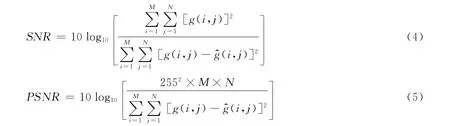
其中,M和N 分别是图像长度和宽度上的像素个数,g(i,j)和(i,j)分别是原始图像和被评价图像在点(i,j)处的灰度值。
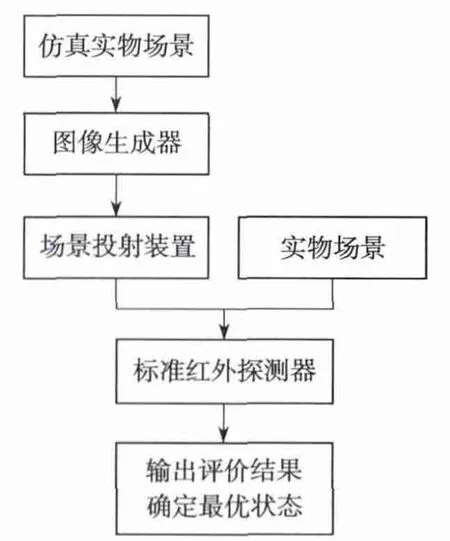
图1 评价系统原理框图Fig.1 Block diagram of the structure of the evaluation system
2.2 均方误差(MSE)
是判断图像质量最常用的方法之一,值越小表示图像质量越好。计算表达式如下:

2.3 归一化均方误差(NMSE)
是一种基于能量归一化的测量方法,它相对均方误差是将分母的图像大小变成了原始图像各个像素灰度的平方和,值越小表示图像质量越好。计算表达式如下:

2.4 信噪比(SNR)和峰值信噪比(PSNR)
信噪比和峰值信噪比也是用来测量图像质量的常用参数,不同的是前几个参数是越小越好,但信噪比和峰值信噪比是值越大代表图像质量越好。计算表达式分别如下:
由于图形质量评价方法吸引越来越多学者的关注,出现了大量的评价方法,评价对象各有不同,经常采用的指标为MSE和PSNR,它们都是基于统计特性的图形质量评价方法,计算比较直观、严格,使得它们一直得到广泛应用,但也存在缺点,对于严格质量要求的场合不宜使用,原因是它们都是基于逐像素点比较图形差别,只能近似反映图形质量。由于红外场景仿真系统所成图形本身质量存在一定缺陷,使用上述方法进行评价完全可以表征图像质量好坏。
3 实验验证
对于图像质量区别明显的图像可以通过人眼直接分辨出像质的好坏,而对于图像质量十分接近的图像则需要借助评价函数来区分,如图2所示。
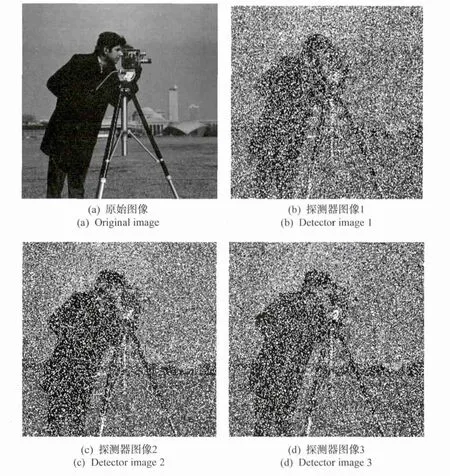
图2 图像质量评价示例Fig.2 Examples of image quality
图2(b)、(c)、(d)像质接近,仅仅通过人眼无法立即判别图像质量的好坏,需要通过评价函数来区分。经过采用上述评价算法与图2(a)比较之后,得到数据如下:
通过分析评价结果可以得出,场景仿真系统工作在图2(b)工作状态时比工作在其它两个状态时成像效果要好。利用上述算法进行成像质量的比较判断,在实际应用中,便于每次使用之前进行系统标定,可以快速、便捷确定仿真系统的最优工作状态。
开发了系统工作状态寻优软件,工作界面如图3所示。
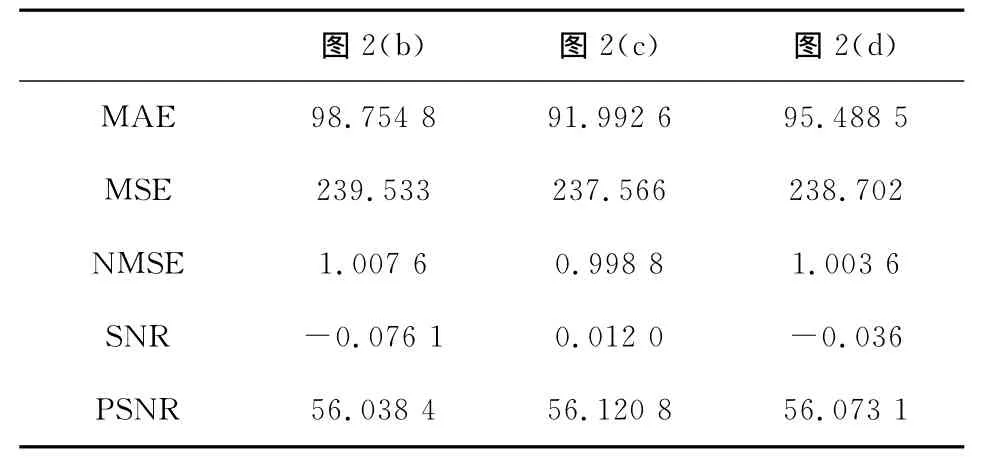
表1 评价算法结果Tab.1 Results of the evaluating algorithm
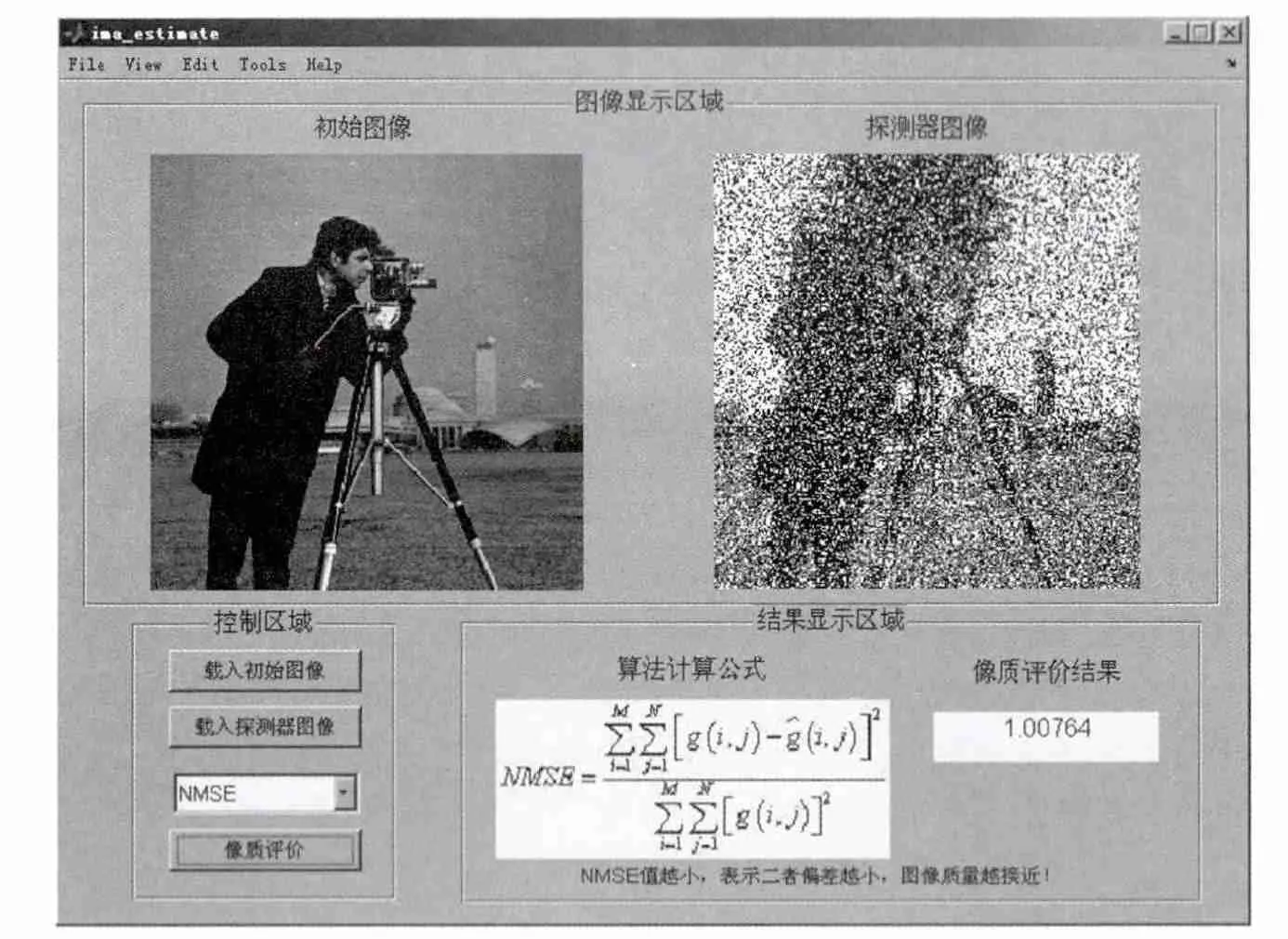
图3 评价软件界面Fig.3 Interface of the evaluating software
4 结 论
介绍了红外场景仿真系统成像质量定量测评的技术指标,以及图像质量评价的方法和算法比较。
利用一种客观评价方法,通过采用标准红外成像设备对某一实物场景进行探测成像,然后利用场景生成器实物场景,用红外成像设备对其探测成像,将所成的两幅图像进行相似度对比,实现场景仿真系统的定性评价,并对场景仿真系统进行标定,可以快速确定仿真系统的最优工作状态。
[1]唐德帅,何永强,黄富瑜,等.基于DMD的动态红外场景仿真技术研究[J].红外技术,2012,34(8):476-481.
[2]李 卓,李 平,单 伟.红外动态场景测试评价技术[J].红外与激光工程,2008,37(3):406-410.
[3]钱丽勋,李 卓,范增明,等.红外动态场景图像质量评价理论概述[J].红外与激光工程,2011,40(10):1835-1840.
[4]钱丽勋,李 卓,范增明,等.一种红外动态场景图像评价装置的性能测试[J].红外与激光工程,2012,41(9):2311-2316.
[5]蒋刚毅,黄大江,王 旭,等.图像质量评价方法研究进展[J].电子与信息学报,2010,32(1):219-226.
[6]谢风英,赵丹培.Visual C++数字图像处理[M].北京:电子工业出版社,2008.
猜你喜欢
黑龙江大学自然科学学报(2022年4期)2022-11-17
环球时报(2022-05-23)2022-05-23
金桥(2021年4期)2021-05-21
作文小学中年级(2020年6期)2020-07-24
北京航空航天大学学报(2019年9期)2019-10-26
电子制作(2019年7期)2019-04-25
电子测试(2018年11期)2018-06-26
雷达学报(2017年3期)2018-01-19
光学精密工程(2016年3期)2016-11-07
西南石油大学学报(自然科学版)(2015年5期)2015-04-16