
一种基于远程控制的搜救机器人
2013-03-17 09:58徐文伟毛丽民彭伟伟吴余生谢新明
常熟理工学院学报 2013年4期
徐文伟,毛丽民,彭伟伟,吴余生,谢新明
(常熟理工学院电气与自动化工程学院,江苏常熟 215500)
一种基于远程控制的搜救机器人
徐文伟,毛丽民,彭伟伟,吴余生,谢新明
(常熟理工学院电气与自动化工程学院,江苏常熟 215500)
针对灾难现场情况复杂,且救援人员在存在烟雾、灰尘和一氧化碳等有害物的情况下很难进入现场开展救援工作的问题,设计了以STC89C516RD+单片机为控制核心的远程控制搜救机器人,通过热释电红外传感器和高清摄像头配合工作.实验表明,该机器人体积小,能快速、准确地搜索到目标.
远程控制;搜救;STC89C516RD+单片机
地震、矿难、火灾等灾难发生后,在废墟中搜寻幸存者,给予必要的医疗救助,是救援人员面临的紧迫任务.超过48小时后被困在废墟中的幸存者存活的概率变得越来越低[1].由于灾难现场情况复杂,救援人员在存在烟雾、灰尘和一氧化碳等有害物的情况下很难进入现场开展救援工作,救援人员可以远程控制搜救机器人进入现场,机器人通过无线局域网将摄像头的视频信号传输到上位机,救援人员根据传回的信息了解现场情况,及时做出准确的判断,为搜救工作带来方便[2].
1 设计原理
搜救机器人在搜索过程中通过热释电红外传感器和高清摄像头的配合,判别是否寻找到幸存者.通过蓝牙透传模块传输控制信号,实现远程控制搜救机器人的运动,机器人通过无线局域网将摄像头的视频信号传输到上位机,使搜救人员可以掌握搜救现场的情况.当机器人行进过程中遇到障碍,救援人员可以操作机器手进行搬运或者绕开行驶.一旦热释电红外传感器感测到幸存者,蜂鸣器开始报警,并将报警信息传输回上位机.救援人员可以适时使用车载机械手搬运覆盖在幸存者身上的物体,同时向被困者输送营养液,维持其生命[3].在常态运行过程中,机器人还会采集现场的温度及烟雾浓度信号传回控制平台,使救援人员能够了解现场的环境信息,对救援工作及人员安全起到帮助作用.
机器人的移动平台采用履带式结构,与轮式结构相比,该驱动方式具备更低的接地比,具有更好的稳定性、牵引力和推动力,爬坡能力、通行性能远远优于轮式,尤其是在泥地、崎岖的野外等松软地面上进行作业.
2 搜救机器人上位机的设计
本系统的上位机程序采用全图形化的操作界面(见图1),视频输入和控制输出都是在该界面上进行的,程序设计采用Visual Basic.上位机接收传回的图像,经过操作人员判断后控制搜救机器人的运动,包括搜救机器人前进、后退、左转、右转,机械手各自由度的调整及营养液输送等,同时机器人将采集的现场信息(如温度、烟雾、热释红外信号等)实时返回给上位机.

图1 摄像头图像采集界面和主控界面
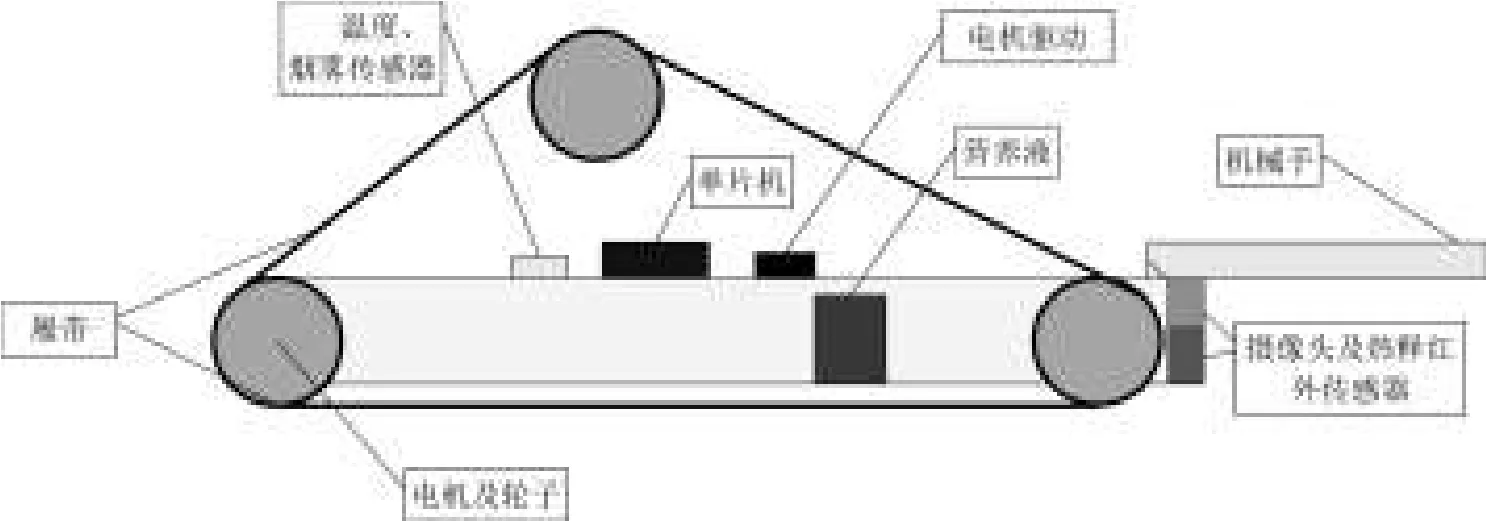
图2 搜救机器人示意图

图3 电机驱动电路
3 硬件电路设计
本设计基于STC89C516RD+微处理器,构建了具有目标搜索与远程控制功能的搜救机器人.机器人系统的组成主要包括微处理器部分、电源供电部分、电机控制部分、目标搜寻与检测部分、通讯部分等,如图2所示.
3.1 微处理器
本设计采用STC89C516RD+单片机,STC89C516RD+是一种低功耗、高性能CMOS8位微控制器,具有64 K在系统可编程Flash存储器,1280字节RAM,全双工串行口,32位I/O口线,看门狗定时器,三个16位定时器/计数器.使得STC89C516RD+为众多嵌入式控制应用系统提供高灵活、超有效的解决方案.
3.2 电机驱动电路
如图3所示,单片机的四个引脚分别与电机驱动的控制端口相连.当输入信号端IN1接高电平,IN2接低电平,电机M1正转;信号端IN1接低电平,IN2接高电平,电机M1反转.当输入信号端IN3接高电平,IN4接低电平,电机M2正转;信号端IN3接低电平,IN4接高电平,电机M2反转.LED1和LED2作为电机M1正反转的指示,LED3和LED4作为电机M2正反转的指示.由于电机是线圈式的,从运行状态到突然停止和转向的切换,电感性负载的电机电流不能突变,将产生无限高的感生电动势,使得驱动芯片击穿,为了防止产生这种影响,所以电路上加入的二极管D1~D8就是在产生感生电流时作泄流作用的,将电能回送给电源,此时电源电压反向加在负载的电感上,迫使电流按照一定的变化率减小至零.
3.3 人体红外检测设计
图4为热释电人体红外检测电路图,该搜救机器人所用的热释电红外传感器采用双探测元的结构,红外传感信号处理器为BISS0001.红外探测器采用热释电元件,对人体辐射出的10 μm左右波长的红外辐射非常敏感.当人体发出的微量红外线引起热释电红外传感的内部敏感元件温度变化时,传感器将在它的外接电阻R4两端产生一种微弱的电压信号,将信号接至BISS0001的前置运算放大器同相输入端1IN+进行放大滤波.经第一级放大处理后从1OUT引脚输出,由电容C3耦合至芯片内部二级运放器的反相输入端2IN-进行第二级放大,在BISS0001内部电路作双向鉴幅处理后有效地触发延时定时器.

图4 热释电人体红外检测电路
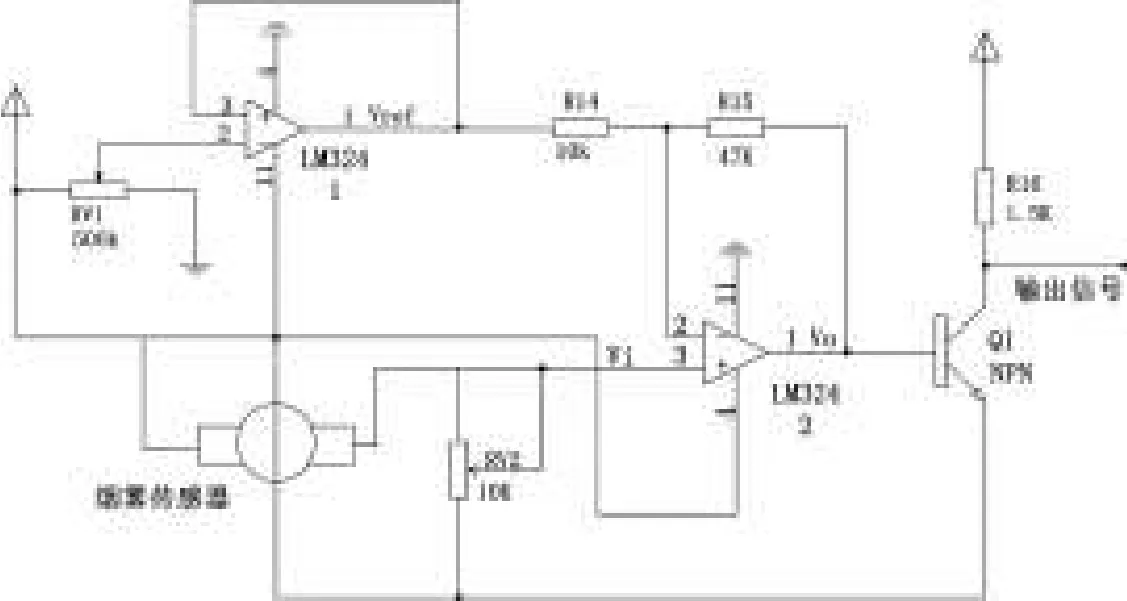
图5 烟雾检测电路

图6 报警电路
3.4 烟雾检测
烟雾检测电路如图5,该设计采用旁热式烟雾传感器MQ1,在没有烟雾的情况下,传感器的阻值为20 K左右,烟雾进入时其阻值急剧下降,使其压降降低.从传感器上端出来的信号Vi经过运算放大器的同相输入端,但是为了保证引入的是负反馈,输出电压Vo通过电阻R15接到反相输入端,同时,反相输入端通过电阻R14接到参考电压Vref,由于引入深度电压串联负反馈,因此电路的输入阻抗很高,输出阻抗很低.高输入阻抗就可以减少放大电路对前端电路的影响,同时低输出阻抗也可以提高自身的抗干扰性.该放大电路还加入了参考电压,引入了零点调节功能,产生一个参考电压Vref,再利用电压跟随器把电压输入到运算放大电路的电压参考端.调节滑动变阻器,可以直接改变放大电路的参考电压,电压跟随器用来匹配阻抗,防止R14和R15对滑动变阻器输出电压的影响.烟雾探头在工作情况下会有一定的发热,这是由于其电阻特性导致的,属正常现象.
3.5 报警电路
图6为报警电路图,当热释电传感器检测到幸存者时,程序控制报警器将端口置低电平,PNP三极管导通,蜂鸣器得电开始报警,可以帮助搜救人员更快到达目的地.
3.6 电源模块
如图7所示,系统使用7.4V 5000 mAh 20C的航模锂电池作为主电源,该电池采用聚合物锂电芯,能提供超长的续航能力,且放电倍率大,适合大功率负载.5 V电源由7805提供,7805是三端稳压芯片,所需外围器件极少,芯片内部有过热、过流的保护电路,使用方便,能提供1.5 A的输出电流,能可靠地为单片机及外接模块供电,输出端口并联10 μF电容是为了减少输出纹波,使控制器不受电源质量干扰.
3.7 串口通讯电路
图8为串口通信电路图,采用了专用芯片MAX232进行RS232电平与TTL电平的转换,采用三线制连接串口,9针串口只连接其中的3根线:第5脚的GND、第2脚的RXD、第3脚的TXD.
3.8 单片机最小系统电路
图9是单片机最小系统电路图,机器人选用宏晶科技生产的高速、低功耗、超强抗干扰的STC89C516RD+单片机为控制核心,该单片机同属于51系列,使用上电复位设计.时钟电路外接11.0592M晶体振荡器,XTAL1与XTAL2分别为用作片内振荡器的反向放大器的输入和输出,并且根据推荐使用两个22 pF的瓷片电容接地来削减谐波对电路稳定性的影响.
3.9 蓝牙串口模块
图10为蓝牙HC-06模块电路图,该模块主从一体,密钥相同则自动配对.模块符合TTL电平规范,UART_TXD与UART_RXD可以与单片机的P30与P31直接相连.LED显示模块是否配对成功,未配对时闪烁频率较高,配对后作0.5 Hz闪烁.蓝牙主机上有个KEY端口,当该端口与电源相连,然后就能触发主机重新搜索周围从机设备并进行配对.当模块作从机时只能被动连接,KEY功能被屏蔽.

图7 电源模块电路

图8 串口通信电路
4 远程搜救机器人的程序设计
远程控制搜救机器人通过热释电红外传感器和高清摄像头配合工作,判别是否找到幸存者.打开搜救机器人的电源,蓝牙主机与从机进行配对连接,无线摄像头建立数据链路.然后打开上位机应用程序,选择相应的串口号及波特率,此刻机器人会与上位机进行数据校验,以防出现数据乱码.通过电脑键盘或者鼠标可以执行多项预定命令,单片机根据接收到的信号,从而控制搜救机器人的运动或者调整机械手的各个自由度,可以搬运物品.控制信号还包括营养液控制,营养液导管固定在机械手上,可以调整机械手的角度向被困者输送营养液.搜救车行进的同时热释电红外传感器通过探测人体发射的10 μm左右的红外线寻找幸存者[4].如果热释电红外传感器感测到幸存者,开启蜂鸣器报警,同时将报警信号传回上位机并显示.否则将现场的温度值及烟雾浓度信息传回至上位机,供救援人员参考[6].

图9 单片机电路图
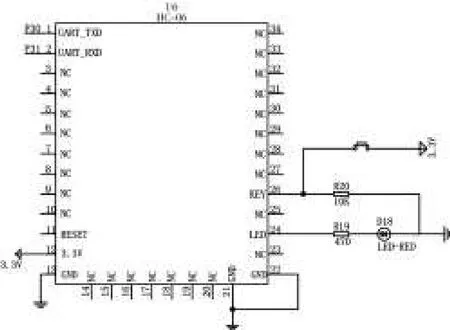
图10 蓝牙串口模块
5 实验调试
为了验证所设计的搜救机器人的可行性,在完成相关硬件设计的基础上,进行了相关的实验,图12(a)-(d)显示了搜救机器人的搜索过程.

图12 搜救机器人的搜索过程

图11 程序流程图
[1]董晓坡,王绪本.救援机器人的发展及其在灾害救援中的应用[J].防震减灾工程学报,2007,27(1):112-117.
[2]王忠民.灾难搜救机器人研究现状与发展趋势[J].测控技术,2007(17):152-155.
[3]吕常智,姚志科.基于无线通信的移动机器人远程控制系统[J].煤矿机械,2012,33(3):239-241.
[4]赵杰,崔崇信.基于无线传感的井下搜救机器人监测系统[J].制造业自动化,2012,34(2):15-17.
[5]吴繁,张伟军.排爆机器人的远程控制系统[J].机械与电子,2010(5):55-58.
[6]Xueshan Gao,Kejie Li,Junyao Gao.A Mobile Robot Platform with Double Angle-Changeable Tracks[J].Advanced Robotics,2009, 23:1085-1102.
The Search and Rescue Robot Based on the Remote Control
XU Wen-wei,MAO Li-min,PENG Wei-wei,WU Yu-sheng,XIE Xin-ming
(School of Electrical and Automation Engineering,Changshu Institute of Technology,Changshu 215500,China)
In view of the complex situation of the disaster scene,and the fact that it is difficult for rescue work⁃ers to enter the site to carry out rescue work on account of smoke,dust and carbon monoxide,this paper puts for⁃ward a STC89C516RD+MCU as the core to control the remote control search and rescue robot design scheme, by using Pyroelectric infrared sensor and a high-definition camera.Experiments show that the robot is small, and can quickly and accurately find the target.
remote control;search and rescue;STC89C516RD+MCU
TP368.1
B
1008-2794(2013)04-0109-05
2012-12-09
江苏省大学生实践创新训练计划项目(2012JSSPITP2310)
毛丽民,讲师,硕士,研究方向:机器人与目标跟踪研究,E-mail:maolimin_1981@163.com.
猜你喜欢
环球时报(2022-05-23)2022-05-23
金桥(2021年4期)2021-05-21
小学阅读指南·低年级版(2021年3期)2021-03-19
装备制造技术(2020年11期)2021-01-26
华人时刊(2019年13期)2019-11-26
电子制作(2019年7期)2019-04-25
当代陕西(2017年12期)2018-01-19
光学精密工程(2016年3期)2016-11-07
通信电源技术(2016年4期)2016-04-04
通信电源技术(2016年5期)2016-03-22
