
光栅成像光谱仪图像畸变校准方法研究*
2013-03-11 05:48吴玲玲路绍军占春连
光学仪器 2013年2期
韩 军,马 筝,吴玲玲,路绍军,于 洵,占春连
(1.西安工业大学 光电工程学院,陕西 西安 710021;2.西安应用光学研究所,陕西 西安 710065)
引 言
20世纪80年代开始,成像光谱仪因能够获取高光谱分辨率景物或目标的高光谱图像,被广泛应用在航空、航天器上,从而对陆地、大气、海洋等进行观测[1]。成像光谱仪按分光方式的不同可分为光栅色散型、棱镜色散型、滤光片型、干涉型和计算层析型。光栅型成像光谱仪中不同采样步长的选择及不合理的拼接方法会导致目标图像的畸变,从而会影响成像光谱仪在探测目标时的准确性和精度,使图像信息缺失或者变形,造成探测误差。因此可以看出畸变是影响光谱测量精度的重要原因之一,通过合理的方法减小畸变就非常必要。
1 光栅型成像光谱仪成像原理
色散型成像光谱仪工作原理如图1所示,目标物的反射光通过前置物镜成像在狭缝平面上,狭缝作为视场光阑使物体条带的像通过,挡掉其他部分光。目标物的条带像经准直物镜照射到色散元件上,经色散元件在垂直狭缝方向按波长(λ)色散,由成像物镜会聚成像在光谱仪像平面上的二维CCD 探测器上。焦平面上平行于狭缝的水平方向,称为空间维,每一行像元对应于一个光谱波段的狭缝像;焦平面上垂直于狭缝方向,即色散方向,称为光谱维,每一列像元对应于狭缝上一个空间瞬时采样视场的不同波长的光谱像。这样,面阵探测器得到的每帧图像是与狭缝对应的目标条带区域的光谱图像数据。若让成像光谱仪相对目标运动,让前置物镜形成的目标像依次通过狭缝,同时记录狭缝的光谱图像,即得到目标的光谱图像三维数据立方体[2]。本文研究的光栅型成像光谱仪在扫描采样的过程中,为了获得准确的目标图像,必须对载物台的运动速度进行精确的控制。

图1 扫描型光栅成像光谱仪工作原理Fig.1 Working principle of the scanning raster imaging spectrometer
本系统利用步进电机驱动载物台运动。因此,载物台的运动速度是通过对步进电机的转速控制来实现的,而步进电机的转速是由软件来控制。步进电机给定的步长数即采样步长直接影响到获得目标像的畸变量。由上所述的原理可知,由于目标在探测器上成像只有一列,因此必须通过扫描的方式才能得到目标景物的高光谱图像。
2 拼接原理
传统的块匹配法虽然精度高但存在速度过慢的缺点,本文应用了一种结合区域特征与小波变换的图像拼接方法,拼接流程如图2所示。

图2 拼接流程图Fig.2 Flow chart of specific splicing
2.1 图像预处理
图像在采集过程中经常会受到光照明暗程度以及设备性能的优劣等因素的影响而导致同一时间、同一地点拍摄的图片在灰度值上的偏差,所以在后续处理前要对采集图像进行预处理。
2.2 图像提取
根据光栅型成像光谱仪的工作原理,某一通道的目标信息是通过对采集到的一系列图像中每一幅图像特定波长的狭缝像信息准确的提取和合成而来。
2.2.1 通带宽度的确定
为了获得一个通道的宽度,所以要选择单色光源,由于激光单色性好,本文选择波长为632.8nm 的He-Ne激光器作为光源进行测量,读出光谱采样点,对采样数据点进行高斯拟合处理就可以确定其通带宽度。由于要提取的是某特定波长的通带信息,所以需对波长定标。
2.2.2 波长定标
由于所用仪器的光谱范围是400~900nm,用低压汞灯作为标准光源来定标。由于在400~900nm的可见光波段内的特征谱线有限,所以本文利用了二级光谱。选择404.656nm,435.833nm,546.073nm 一级光谱和730.966nm,809.312nm,871.666nm 二级光谱等6条特征光谱[3]进行波长定标。
2.3 小波分解
小波变换是时间(空间)频率的局部化分析,它通过伸缩平移运算对信号(函数)逐步进行多尺度细化,最终达到高频处时间细分,低频处频率细分,能自动适应时频信号分析的要求,从而可聚焦到信号的任意细节[4]。
2.4 区域特征的选取和融合规则
主要研究基于区域的小波融合算法,选用平均梯度作为区域特征来构造新的融合算法,平均梯度用来衡量图像的清晰程度,由此来反映图像微小的细节反差。
2.5 融合规则与算法
利用相关系数的公式,采用循环式搜索与已经截下来的图片相关系数大于等于某一数值,一般都在相关系数大于等于0.9以上的模块或区域,然后进行相应的图像拼接。
具体来说,该算法可以分为以下几个步骤:
(1)对源图像进行二维小波变换,将源图像分解为表示低频信息的近似子图像和表示高频信息的细节子图像,细节子图像分为水平方向,垂直方向和对角线方向;
(2)使用加权,平均的融合规则合并最后一个分解层的近似子图像,近似子图像是图像滤除细节信息所得,包含的是主要的背景信息;
(3)对于细节子图像系列采用基于邻域平均梯度的融合规则;
(4)一致性的检验。利用3×3或者5×5的窗口在融合后的图像上移动,通过窗口周围的像素来验证窗口中心的像素,如果中心像素取自源图像A 的子图像,而周围的像素大部分取自源图像B的子图像,则把该中心像素改为对应的源图像B的子图像在该位置的系数;
(5)重构图像。根据融合规则确定的各子图像进行小波反变换,重构出融合图像。
3 实 验
3.1 通带信息提取结果
选择波长为632.8nm 的He-Ne激光器作为光源进行测量,读出的光谱采样点,对采样数据点进行高斯拟合处理得出一个通带宽度占13个像元,如表1所示为光谱采样点数据。
选择404.656nm,435.833nm,546.073nm 一级光谱和730.966nm,809.312nm,871.666nm 二级光谱等6条特征光谱[5],实验采集到的特征波长和CCD 探测单元的对应关系如表2所示。
根据表2中的数据,采用最小二乘法进行拟合。通过对线性拟合、二次拟合、三次拟合函数对已知波长误差的均方根比较可知,三次多项式拟合可达到较高的波长定位精度,因此对于光谱仪波长定标是采用三次多项式拟合的方法。
图3为其中一幅狭缝像及提取信息后的图像,其中(a)为原始狭缝像。(b)为提取后的图像。
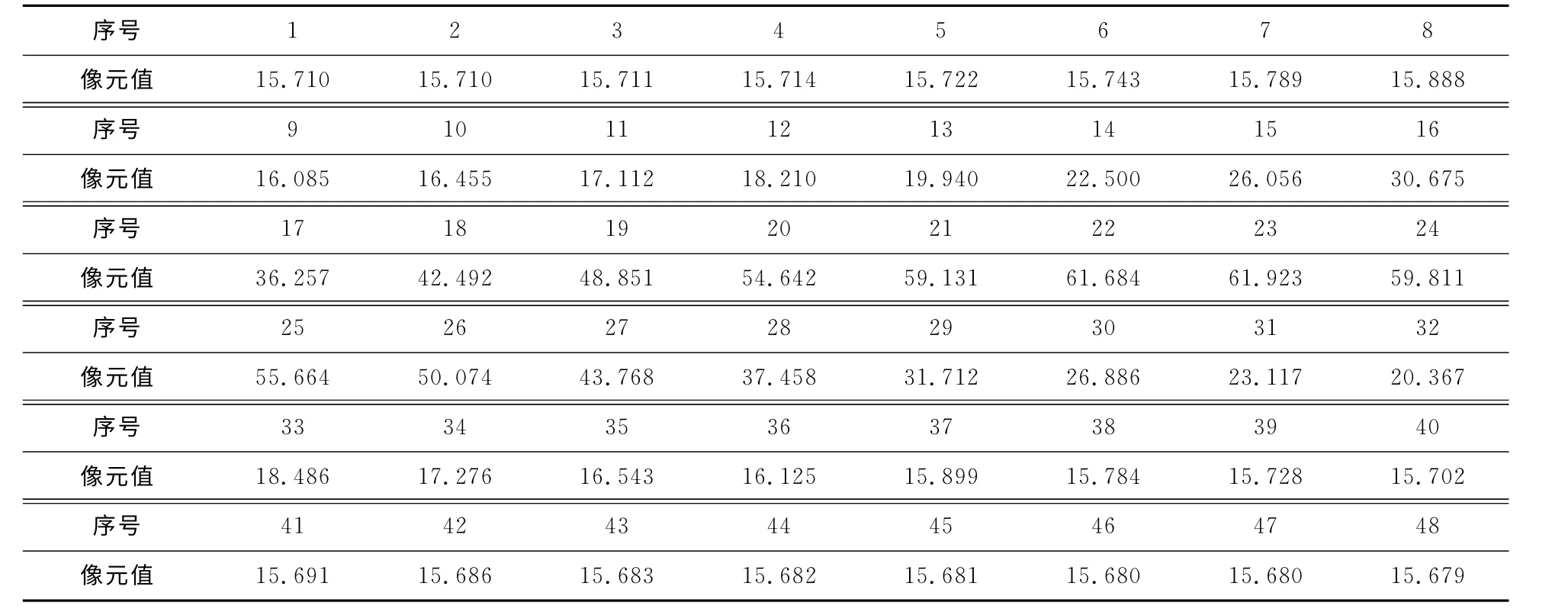
表1 光谱采样数据点Tab.1 Spectral sampling data points

表2 特征波长和CCD探测单元的对应关系Tab.2 Characteristic wavelength and CCD detection unit correspondence

图3 图像提取Fig.3 Image extraction
3.2 小波分解效果图
图4 为小波分解后的三分量:

图4 小波分解的三个分量Fig 4 Wavelet decomposition of the three components
由于目标像的畸变量与采样步长及拼接的方法有关,从实验中可以得出不同的采样步长对应不同程度拉伸或者压缩的畸变,当采样步长为0.002 1°时所对应的相对畸变量为1.008接近1。为了使畸变量更小,达到更高的探测精度,本文采用基于区域和小波变换的拼接方法。对比原始的拼接方法,可以看出畸变量有明显的减小,并且相对畸变量为1.000 3,探测精度提高了一个数量级,并且恢复了一些图像的信息。如图5所示,(a)为原始拼接方法所得目标图像,(b)为本文拼接方法所得目标像。

图5 在采样步长为0.002 1°时两种拼接方法所得目标图像Fig.5 Target Images obtained with two different splicing methods at the frequency of 0.002 1°
4 结 论
本文介绍了一定采样步长不同拼接方法下校正光栅成像光谱仪图像畸变量的原理和方法。实验证明,基于区域和小波变换的拼接方法在采样步长为0.002 1°时分划板图像的畸变量得到了减小,实现了成像光谱仪图像畸变的修正。本文提出的方法有效地减小了成像光谱仪图像的畸变,提高了成像光谱仪在探测目标时的准确性和精度,避免了因图像信息缺失或者变形而造成的探测误差。
[1] 郑玉权,禹秉熙.成像光谱仪分光技术概览[J].遥感学报,2002,6(1):75-79.
[2] 杜述松,王咏梅,王英鉴.空间应用干涉成像光谱仪的研究[J].光学仪器,2008,30(3):77-82.
[3] 谢印忠,庄松林,张保洲.基于线阵CCD的光谱仪定标研究[J].仪器仪表学报,2011,32(3):546-550.
[4] 张旭勃,王军锋,杨永永,等.基于小波变换的图像拼接算法[J].计算机仿真,2011.33(4):62-67.
猜你喜欢
今日农业(2021年19期)2022-01-12
空间科学学报(2020年1期)2021-01-14
摄影之友(影像视觉)(2017年10期)2017-11-07
成都信息工程大学学报(2017年6期)2017-03-16
光学精密工程(2016年6期)2016-11-07
光学精密工程(2016年5期)2016-11-07
中国光学(2015年5期)2015-12-09
安徽工业大学学报(自然科学版)(2014年4期)2014-07-11
癌变·畸变·突变(2014年2期)2014-03-01
河南科技(2014年11期)2014-02-27
