基于表面肌电信号的手腕动作模式识别
2013-03-10 08:11张启忠席旭刚马玉良罗志增佘青山
中国生物医学工程学报 2013年3期
张启忠 席旭刚 马玉良 罗志增 佘青山
(杭州电子科技大学智能控制与机器人研究所,杭州 310018)
引言
肌电信号(electromyography,EMG)是一种伴随肌肉活动的生物电信号,是众多肌纤维中运动单元动作电位的叠加,蕴含了肌肉活动的各种信息。通过提取截肢者自身残端的EMG 信号,利用其蕴含的动作模式信息,可以达到假手智能控制的目的。
目前,肌电假手智能控制的研究主要集中在相关的基础领域,如肌电信号采样频率的确定和采样窗口范围变化对动作模式识别率的影响[1-2],以及实时的肌电信号消噪方法[3]。也有研究从肌电信号中提取不同类型的特征,选用合适的分类器以实现精细动作模式的区分,从而控制智能假手的动作[4-5]。然而,从特征及分类器选取角度研究以提高动作模式识别率的并不多,往往只是采用在相关肌肉组上尽可能多地布置采样电极,从信号的时域或频域中提取简单特征,如信号的平均幅值(MAV)、过零点数(NZC)、波形长度(WL)、斜率符号变化数(SSC)等,最后用线性判别分类器等方法实现动作模式的识别[6-8]。这种方法从理论上能提高动作模式识别的实时性,然而在实际使用中特征信号的波动范围很大,识别率并不理想,而且过多的采样电极、规模偏大的调理电路,让使用者穿戴不方便。因而,寻找理想的肌电信号动作模式特征,设计分类能力强且具有增强学习能力的模式识别方法,是值得重视的研究方向。
本研究是从肌电信号的产生机理出发,选取能从整体及细节两方面表征出肌电信号序列形态特征的非线性信息,设计具有增量学习能力的动作模式分类器,实现对手腕的4 种精细动作模式腕右旋、腕左旋及腕伸、腕屈的识别,用于肌电假手的控制。
1 表面肌电信号特征的选取
特征选取是模式识别的核心问题。如果能从待识别对象中选取出所需的有效特征,且不同对象的特征差别较大,分类器就能比较容易地实现对不同模式的分类。下面从肌电信号的产生机理出发,寻找用于模式识别的特征信息。
动作单元(motor unit,MU)是肌肉最小的收缩单位,由α 运动神经元、终板及多条肌纤维组成,如图1 所示。α 运动神经元发放固定频率值40 Hz 以下的δ 脉冲序列[9-10],脉冲序列经轴突、终板传导到与之连接的肌纤维形成动作电位序列(MUAPT),引起肌纤维收缩而产生肌张力,并带动各关节运动。此时,如果在对应组织处放置测试电极,则在检测电极与参考点(如肘部)之间表现出电位差,检测电极所募集的各动作单元综合形成的动作电位即为表面肌电信号(sEMG)。
从数学上描述,若令第k 个动作单元所产生的动作电位序列MUAPT 为hk(t)。则表面肌电信号是M 个MUAPT 的总和,即
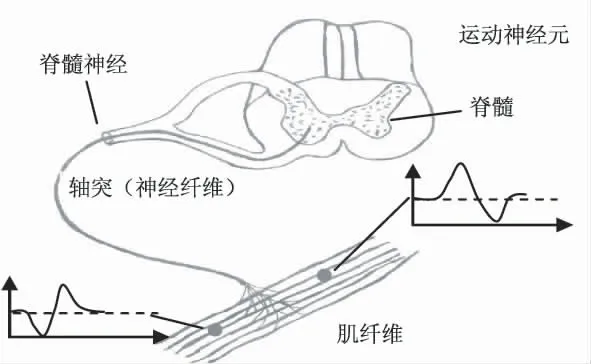
图1 运动神经元与肌纤维的电剌激传播Fig. 1 The electrical stimulating propagation of motoneuron and muscle fibers
由于单个α 运动神经元释放的电信号为具有周期性的脉冲序列uk(t),多个运动神经单元的组合仍为周期性信号,因而从形态上分析肌电信号具有明显的整体自相似性。同时,不同动作模式参与的运动神经单元、神经纤维、肌纤维的数目等都是有区别的,信号在细节上又有其自身的复杂性。复杂性和整体自相似性是肌电信号的两个重要特征。
近似熵是表征信号复杂度常用的指标。由于近似熵算法只要有比较短的数据就能得出比较稳健的估计值,同时又是有较好的抗噪及抗干扰能力[11],因而是理想的计算肌电信号复杂度的算法。分形是研究具有自相似性、标度不变性的非线性复杂系统的有效方法。自相似性是指某种结构或过程的特征从不同的空间尺度或时间尺度来看是相似的,标度不变性是指在研究对象上任选一局部区域进行放大还会显示原图的形态特征。由于肌电信号具有此特点,因而用分形的概念来分析表面肌电信号是可行的。
笔者选用近似熵指标及分维数的概念,分别表征时间序列信号的整体复杂度及自似性,能较完整地表达出信号的形态特征。
2 特征计算及模式识别方法
2.1 近似熵
近似熵是Princus 在1991 年定义的[11]。时间序列信号(x1,x2,…,xi,…xN)的近似熵算法步骤如下:
1)构造m 维矢量集合X1,X2,…,XN-m+1,其中

2)计算矢量X(i)与X(j)之间的距离d[X(i),X(j)],定义为

3)给定阈值r(r 为选定的相似容限,r >0 ),对于每一个i ≤N -m +1,统计d[X(i),X(j)]≤r 的数目,如果d[X(i),X(j)]≤r,那么X(i),X(j)就被认为是近似的。计算近似矢量个数与矢量总数的比值,有
式中,f(·)为Heaviside 阶跃函数。
4)定义φm(r)为(r)的平均值,即

5)对于m + 1,重复计算1 ~4 步,得到φm+1(r)。
6)近似熵ApEn 可定义为

由于信号序列N 的值是有限的,因而近似熵ApEn 用下式的统计数代替,即

对于相同的动作模式,肌电信号的波形具有较强的相似性,而细节却与手的动作速度、用力大小等因素有关,如用原始信号直接求取信号的复杂度,同一动作模式复杂度的值变动范围会较大,达不到理想的识别效果,因而还需对信号做下述处理:
1)求肌电信号的局部极大、极小值。通过插值函数获得信号的上下包络线,并对上下包络线求平均,记为m(i)。以包络线上同符号值s(i)替代对应序列点上肌电信号原值x(i),求信号x(i)与m(i)的差值,记为h(i)= x(i)- m(i)。其中,i 为肌电信号的序数,其值为1 ~N,N 为信号的长度。
2)将h(i)信号归一化。令hmax= max| h(i)|(i = 1,2,…,N)。最后按幅度归一化,有

肌电信号动作模式起跳时间的确定采用滑动窗的方法,窗内能量大于某阈值时,认为动作开始,取后续的1 024个采样点信号作为信号处理对象数据。预处理后计算信号的标准差STD,并取m = 2,r= 0.2STD,计算肌电信号的近似熵。采用了下述快速方法,计算式(4)中的(r)及(r)。
1)对N 点信号序列x(i)计算N × N 距离矩阵T,其中元素tij的值为

2.2 分维数
信号序列分维数的计算用改变粗视化程度的方法。针对已做时间与幅值归一化的时间序列信号X = (x1,x2,…,xN),笔者所设计的分维数计算方法如下:
1)选定步长k,把时间序列信号分成m 等分,有

式中,「⏋代表上取整。
段内平均,形成新的时间序列信号Y = [y1,y2,…,yj,…,ym],其中


2)计算步长为k 时的曲线总长度L(k),有

由分析可知,lnk 和lnL(k)是斜率为- α 的直线关系。若能求得lnk 和lnL(k),则用最小二乘法拟合这些点,即可得到α,进而得到分维数D。
由于在近似熵计算时已对信号进行了幅值归一化,所以只须对信号进行时间坐标的归一化。设幅值归一化信号为X = (x1,x2,…,xN),令第i 点的横坐标取为i/N,则时间归一化后各点对应横坐标为:i = 1/N,2/N,…,(N -1)/N,1。分维数计算中k的值可取20,21,…,这样相邻点可两两相加取平均,以达到快速计算新的时间序列信号 Y =的目的。
2.3 KNN 模型增量学习算法
K 最近邻(KNN)法是一种基于实例的分类算法[12],其基本思想是:使用一种度量计算待分类样本与所有训练样本之间的距离,找到距离待分类样本最近的k 个近邻;然后根据这k 个近邻所属的类别进行多数投票来确定待分类样本的类别。KNN法具有性能稳定、准确率高的优势。然而,KNN 是一种懒散型的学习方法,也不是一种增量学习算法[13-14]。为解决KNN 算法存在的缺陷,改进提出了一种具有增量学习能力的KNN 模型增量学习算法,由样本点数据整理及KNN 法分类两部分构成。
算法的第一部分:构造一系列模型簇,以模型簇的中心点作为代表点,用于新样本的KNN 法分类,簇 中 的 模 型 以 五 元 组 {Cls(di),Sim(di),Cent(di),Num(di),Rep(di)} 表 示。 其 中:Cls(di)表示该区域中数据点的类别;Sim(di)表示区域的半径,即最远点到中心点的距离;Cent(di)表示区域的中心点di本身,即这些样本点的均值;Num(di)表示区域覆盖点的数量;Rep(di)则为构成簇的样本数据串。对样本点数据进行整理,首先对每个类别中的样本点使用C-均值聚类算法进行自动聚类,分成m 个簇。然后建立模型的五元组。
为使分类器具有增量学习能力,对于后续使用中经模式识别得到验证准确识别的样本点,按距离度量最近的原则加到已有簇中,而识别结果不正确的样本点则在模型簇中另建五元组,从而进一步改善学习样本集的分布状态,使其更接近总体分布。当新增的样本点数达到一定量的累积时,可按实际需求剔除部分最早批次的样本点,或保留所有样本点,然后用C-均值聚类算法重新聚类,重建模型簇。
算法的第二部分:用K 最近邻(KNN)法计算待分类样本与各类代表点之间的距离。在投票决定待识别样本的类别时,对每个代表点乘一权重系数,由加权后的数据投票确定待识别样本的类别。
若在数据整理阶段,使用过程中不对模型簇的样本点进行调整,则为不具备增量学习能力的KNN模型算法。
3 特征提取及模式识别结果
3.1 动作表面肌电信号的采集
人体的前臂肌肉群包括尺侧腕伸肌、尺侧腕屈肌、掌长肌等数十块肌肉,其主要功能是实现屈肘、屈腕、屈指和前臂旋转等,它是人体中十分重要的部位,也是肌电假手的控制信息源。本研究针对动作模式腕屈、腕伸、腕左旋及腕右旋进行识别,结果用于自制肌电假手的控制。
实验对象均为右手低位截肢志愿者:男性6 名,年龄(40 ±5)岁,体重(65.0 ±5.0)kg,身高(170.0±5.0)cm;女性4 名,年龄(35 ±5)岁,体重(52.0 ±6.0)kg,身高(162.0 ±5.0)cm。取6 位男性中的4位,编号为#01 ~#04;女性中的2 位,编号为#04 ~#05;余下的2 男2 女,编号为#07 ~#10。实验前要求受试者24 h 内不做剧烈运动,以排除非实验要求的肌肉疲劳影响。每次试验需记录受试者编号、开始时间、所采集肌电信号的时刻、受试者状态等信息,将所采集的表面肌电信号建立数据库。由于动作模式腕屈、腕伸、腕左旋及腕右旋主要与前臂肌肉群的尺侧腕伸肌与尺侧腕屈肌有关,因而选取实验者右手上肢这两组肌肉表面作为sEMG 的拾取位置,每组肌肉表面贴附一次性双极表面电极;选用由美国 Noraxon 公司研制的新型便携式MyoTrace400 肌电信号采集仪来获取信号,采样频率为2 500 Hz,仪器内置截止频率500 Hz 的低通滤波器和截止频率为10 Hz 的高通滤波器。图2 为肌电信号测试实验,图3 为腕右旋动作的肌电信号。
理想的肌电假手应具有可推广性,即产品参数的设置是基于部分受试者的,但结果对另一部分人群也适用。因此,笔者对肌电信号特征的统计与分析及初始分类器的构建是基于前6 位受试者的,而动作模式的识别则对所有10 位受试者进行。
3.2 肌电信号近似熵及分维数的计算结果
表1 为从前6 位低位截肢者数据库中随机取得的非疲劳状态下4 类动作模式各200 组肌电信号近似熵的统计结果,图4 为各取50 组肌电信号近似熵的二维分布。表1 的数据显示,在尺侧腕伸肌与尺侧腕屈肌上,采集的腕屈与腕伸两个动作的肌电信号的近似熵值较大,右旋及左旋动作肌电信号的近似熵相对较小。而且,每类动作在尺侧腕伸肌与尺侧腕屈肌上近似熵的取值大小情况正相反,反映在图中4 个动作相应复杂度值的聚类特性较为明显,利于动作模式的分类。
表2 为从前6 位低位截肢者数据库中随机取得的非疲劳状态下4 类动作模式各200 组肌电信号分维数的统计结果,图5 为各取50 组肌电信号分维数的二维分布。在表2 中,右旋和腕伸动作,尺侧腕伸肌上的分维数较尺侧腕屈肌上的值大。左旋与腕屈在肌肉组上的表现与上面情况正好相反,尺侧腕腕伸肌上的分维数较尺侧腕屈肌上的值要小。在图5 中,4 类动作分维数点对的分布聚类特性明显。
3.3 模式识别结果

图2 肌电信号测试实验Fig.2 Experiment on electromyogram(EMG)test
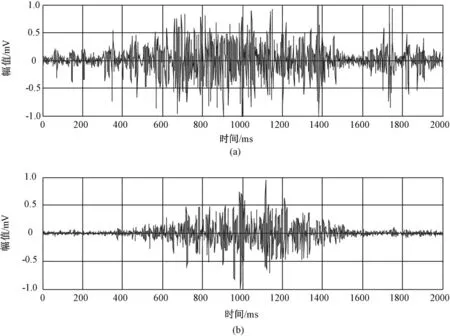
图3 腕右旋动作的表面肌电信号。(a)尺侧腕伸肌;(b)尺侧腕屈肌Fig.3 The surface electromyography(sEMG)of wrist supination.(a)extensor carpi ulnaris;(b)flexor carpi ulnaris
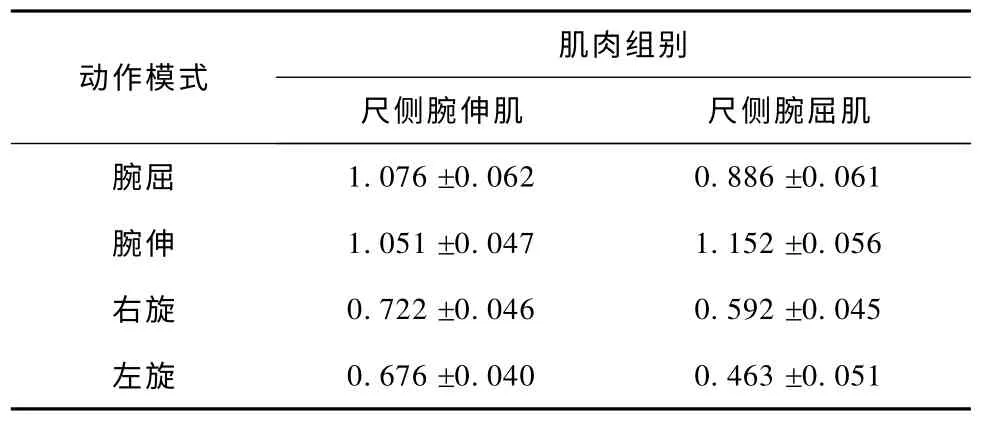
表1 表面肌电信号复杂度指数统计数据(n =6,均值±标准差)Tab.1 Statistic data of sEMG's complexity (n =6,mean±SD)
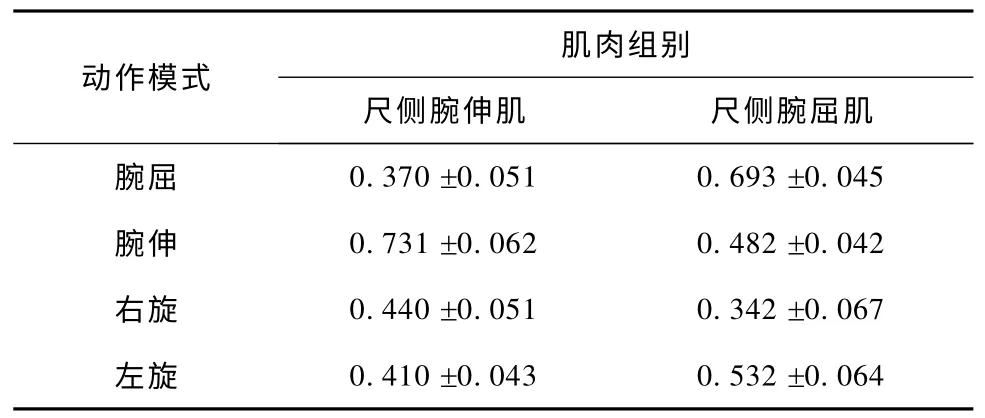
表2 表面肌电信号分维数统计数据(n = 6,均值±标准差)Tab.2 Statistic data of sEMG's fractal dimension (n =6,mean ±SD)
针对肌电信号动作模式的识别问题,初始分类器的构建是从前6 位受试者非疲劳状态下所建立的肌电信号数据库中随机地取4 ×100 组信号,每类动作模式各100 次。计算其复杂度和分维数,其中的80 组作为样本数据,以C-均值聚类算法构建模型簇;其余20 组作为测试样本,测试分类器的分类性能。实验中能完全识别,表明所设计的分类器合理。再以此方式建立的模式分类器,用于受试者后续动作模式的识别。
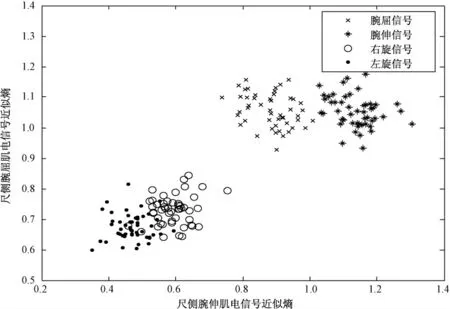
图4 肌电信号复杂度指数分布Fig.4 Distribution of sEMG's complexity
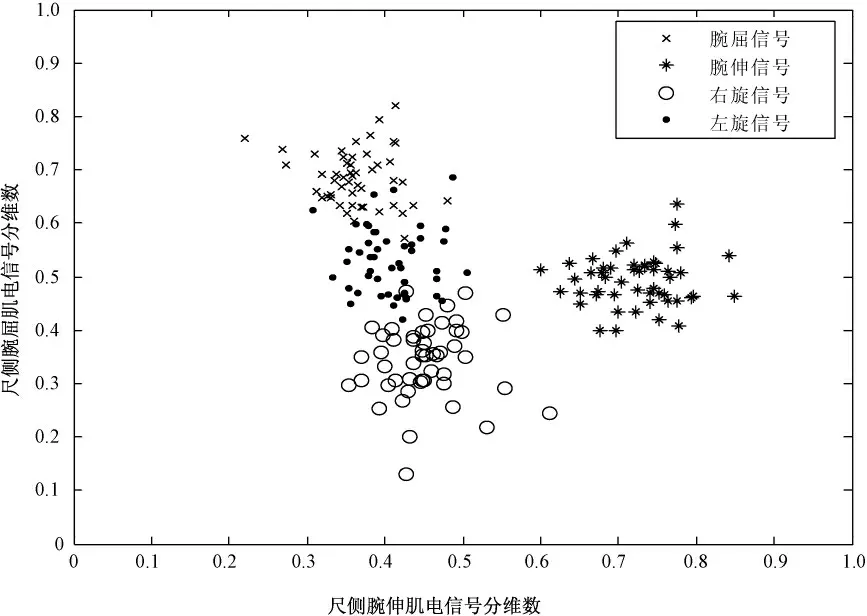
图5 肌电信号分维数分布Fig.5 Distribution of sEMG's fractal dimension
为验证所提出的模式识别方案的效果,设计了如下的实验方法。受试者从休息放松状态进入动作状态,连续循环地做动作组——腕右旋、腕左旋及腕伸、腕屈,共100 组。100 组的选定使得受试者在后半阶段的实验中明显处于疲劳状态,表3 为10位受试者对100 组动作模式的实验结果。模式分类器采用的是具有增量学习能力的KNN 模型增量学习算法,每行数据代表了对某类动作100 次识别得到的结果及识别参数。识别效果的评价采用了灵敏度、特异度及识别率3 个参数,计算灵敏度、特异度的真阳性和真阴性定义为:属于某一动作模式且被准确判别则为真阳性,不属于某一动作模式且被准确识别不是该模式的为真阴性。在此定义下,灵敏度的值与识别率的值相同。
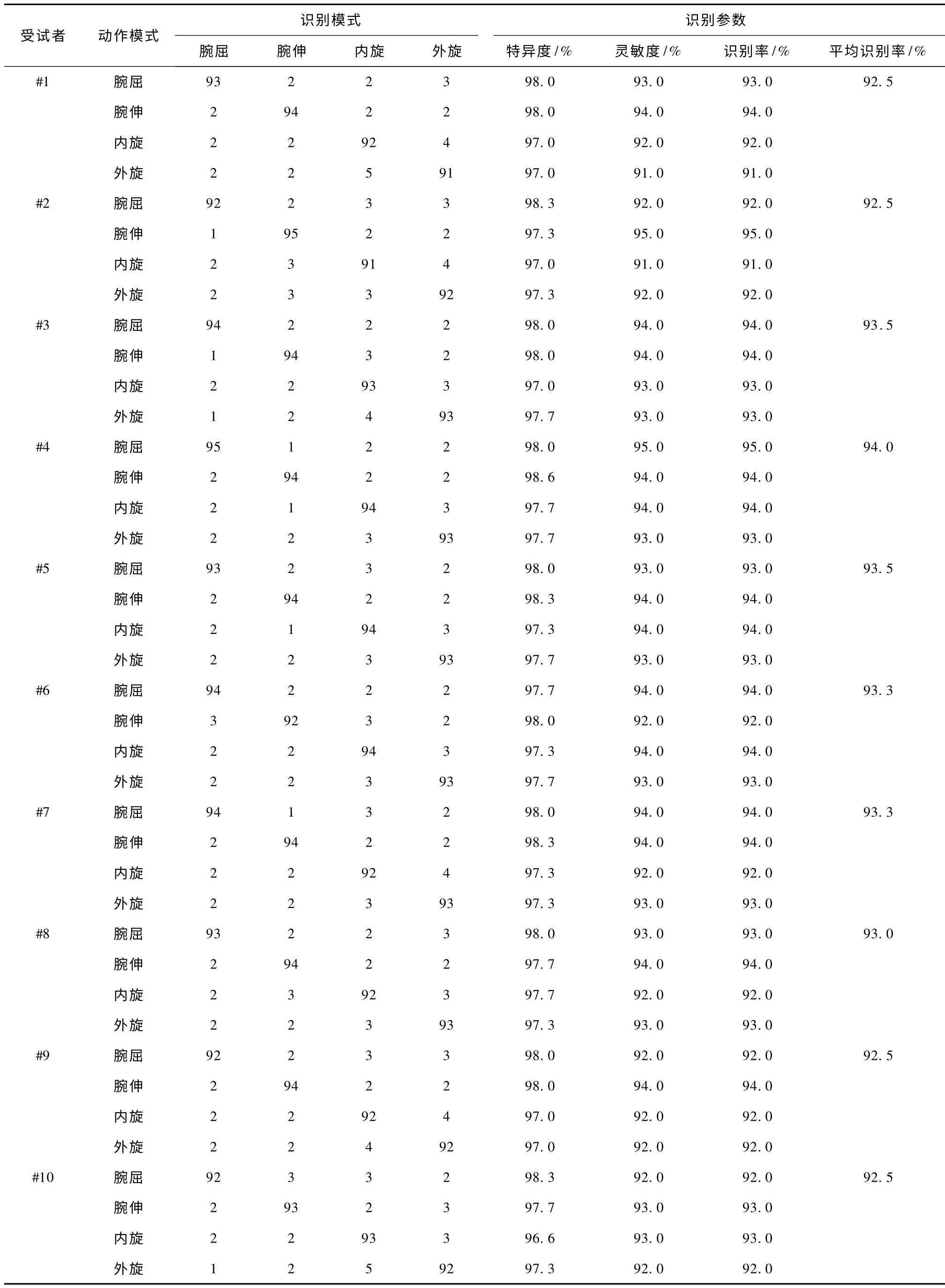
表3 受试者动作模式识别结果统计Tab.3 Statistic data of mode recognition rate of the participants's action
数据表明,受试者动作模式的识别率(灵敏度)均达到了92.5%以上,且前6 位受试者与后4 位受试者动作模式识别无明显差别,说明所设计的模式识别方案具有应用推广能力。
肌电信号的熵及分维数会随着肌肉疲劳的产生而有相应的变化[15-16],因而本研究还对是否采用增量学习能力分类器对模式识别率的影响做了对比实验。表4 为#01 号受试者10 次实验不同阶段的识别率数据,实验中的前50 组定义为阶段Ⅰ,后50 组定义为阶段Ⅱ,50 组的选定是使受试者感觉开始进入肌肉疲劳状态。其中,“分类器1”代表普通的不具有增量学习能力的KNN 模型算法,“分类器2”代表具有增量学习能力的KNN 模型增量学习算法,单元中的值代表对4 类各50 组动作的平均识别率。

表4 各阶段模式识别率(%)统计Tab.4 Statistic data of mode recognition rate(%)in each phase
数据显示,相同的肌电信号,在不采用增量学习算法时,识别率随着假肢使用者生理状态的变化而下降;在采用增量学习型算法时,识别率稳定。两种分类器对应阶段Ⅰ、Ⅱ,平均识别率之差为2.0%、4.5%。为判断差异是由于偶然因素引起或是两者确实本身存在着差异,笔者利用SPSS 软件对实验结果进行了配对样本t 检验,显著性检验标准为P <0.05。检验结果显示,阶段Ⅰ肌电信号用不同分类器分类,其正确识别率数据的差异由抽样误差引起的概率为P =0.001,阶段Ⅱ则接近于0。这表明,两个阶段的数据用不同分类器识别,其差别在统计学上都有显著性意义。
4 讨论
本研究选用近似熵作为表征肌电信号的复杂度特征,而不同动作的复杂度数据有较明显的差异。从表1 及图4 中可以看出,腕屈与腕伸两个动作主要由尺侧腕伸肌与尺侧腕屈肌参与完成,而右旋及左旋动作的完成相对前两个动作更为复杂、参与的肌肉组较多。实验结果表明,在尺侧腕伸肌与尺侧腕屈肌上采集的腕屈与腕伸两个动作的肌电信号的近似熵值较大,右旋及左旋动作的肌电信号的近似熵相对较小。说明,用近似熵指标表达肌电信号的复杂度特征,研究方向是正确的,能很好地用于动作的分类。
分析肌肉组在各种动作下的活动状态。以右旋和腕伸为例,肌肉组尺侧腕伸肌都处于较强的收缩状态,尺侧腕屈肌处于相对放松状态。从表2 中可以看出,反映肌电信号整体自相似性的分形维数的数值情况相似,尺侧腕伸肌上的分维数较尺侧腕屈肌上的值大。左旋与腕屈在肌肉组上的表现与上面情况正好相反,尺侧腕伸肌上的分维数较尺侧腕屈肌上的值小。数据说明,反映肌电信号整体自相似性的分维数指标与肌肉的活动强度相关,分维数的大小随肌肉活动强度增大而增大。
因此,笔者选用近似熵指标与分维数指标,完整地表达出了不同动作模式肌电信号的形态特征,再与分类器-KNN 模型增量学习算法结合,取得了较满意的分类结果。
为验证所提出的动作模式识别方法的优越性,笔者把该方案与Arjunan 等所提方案[17-18]进行了比较。他们选用了两种信号特征向量的选取方法,一种是提取肌电信号的均方值(RMS)、平均幅值(MAV)、方差(VAR)及波形长度(WL)构成简单特征组合,另一种以Fukuda O[19]方法提取肌电信号的分维数及最大分形长度(maximum fractal length,MFL)构成分形特征组合;然后,用BP 网络进行分类识别,实验数据采用#01 号受试者阶段Ⅰ的肌电信号,结果得出简单特征组合的识别率为81.0%,分形特征组合的识别率为86.0%,与本方法有较大差距。上述结果说明:简单特征组合仅选取信号的常用时域特征,特征主要反映肌肉的活动强度;而分形特征组合只反映信号的自相似性及信号强度,没能全面表征信号的形态特征。
5 结论
对基于表面肌电信号形态特征的手腕动作模式识别进行了研究,实现了手腕的4 种精细动作模式腕屈、腕伸、腕右旋、腕左旋的识别,结果用于肌电假手的动作命令产生。
模式识别的输入特征采用了复杂度理论中的近似熵及分形理论中的分维数指标,分别表征信号形态特征上的细节复杂度及整体自相似性。动作模式识别分类器采用了改进的KNN 模型增量学习算法,所设计的分类器不但继承了KNN 算法性能稳定、识别率高的优点,而且具备了增量学习的能力。对受试者右手腕部的4 个精细动作腕屈、腕伸、腕右旋、腕左旋的识别实验中,达到了92.5% 以上的准确识别率,具有实用价值。
[1] Li Guanlin,Li Yaonan,Yu Long,et al. Conditioning and sampling issues of EMG signals in motion recognition of multifunctional myoelectric prostheses[J]. Ann Biomed Eng,2011,39(6):1779 -1787.
[2] Smith LH,Hargrove LJ,Lock BA,et al. Determining the optimal window length for pattern recognition-based myoelectric control:Balancing the competing effects of classification error and controller delay[J]. IEEE Trans Neural Syst Rehabil Eng,2011,19(2):186 -192.
[3] Hahne JM,Graimann B,Muller KR. Spatial Filtering for Robust Myoelectric Control[J]. IEEE Trans Biomed Eng,2012,59(5):1436 -1443.
[4] Khushaba RN,Kodagoda S,Takruri M,et al. Toward improved control of prosthetic fingers using surface electromyogram (EMG)signals[J]. Expert Syst Appl,2012,39(12):10731 -10738.
[5] Gini G,Arvetti M,Somlai I,et al. Acquisition and analysis of EMG signals to recognize multiple hand movements for prosthetic applications[J]. Appl Bion Biomechan,2012,9(2):145 -155.
[6] Li Guanlin, Schultz AE, Kuiken TA. Quantifying pattern recognition-based myoelectric control of multifunctional transradial prostheses[J]. IEEE Trans Neural Syst Rehabil Eng,2010,18(2):185 -192.
[7] Losier Y,Englehart K,Hudgins B. Evaluation of shoulder complex motion-based input strategies for endpoint prostheticlimb control using dual-task paradigm[J]. J Rehabil Res Dev,2011,48:669 -678.
[8] Bunderson NE,Kuiken TA. Quantification of feature space changes with experience during electromyogram pattern recognition control[J]. IEEE Trans Neural Syst Rehabil Eng,2012,20(3):239 -246.
[9] Duchene J,Hogrel J Y. A model of EMG generation[J]. IEEE Trans Biomed Eng,2000,47(2):192 -201.
[10] Basmajian JV, Deluca CJ. Electromyography-physiology,engineering and noninvasive applications[M]. New York::IEEE Press,2004.
[11] Pincus SM. Approximate entropy (ApEn) as a complexity measure[J]. Chaos,1995,5(1):110 -117.
[12] Cover TM,Hart PE. Nearest neighbor pattern classification[J].IEEE Trans Inf Theory,1967,13(1):21 -27.
[13] Guo Gongde,Wang Hui,Bell D,et al. Using kNN model for automatic text categorization[J]. Soft Comput,2006,10(5):423 -430.
[14] 陈黎飞,郭躬德. 最近邻分类的多代表点学习算法[J]. 模式识别与人工智能,2011,24(6):883 -888.
[15] 刘加海,王健,罗晓芳. 局部肌肉疲劳的表面肌电信号复杂度和熵变化[J]. 生物物理学报,2004,20(3):198 -202.
[16] 蔡立羽,王志中,李凌. 肌肉疲劳过程中的表面肌电信号特征研究[J]. 中国康复医学杂志,2000,15(2):94 -95.
[17] Arjunan SP, Kumar DK. Fractal properties of surface electromyogram for classification of low level hand movements from single-channel forearm muscle activity[J]. J Mech Med Biol,2011,11(3):581 -590.
[18] Arjunan SP,Kumar DK. Decoding subtle forearm flexions using fractal features of surface electromyogram from single single and multiple sensors[J]. J Neur Rehabil,2010,7(1):1 -10.
[19] Fukuda O,Tsuji T,Kaneko M,et al. A human-assisting manipulator teleoperated by EMG signals and arm motions[J].IEEE Trans Robot Autom,2003,19(2):210 -222.
猜你喜欢
科技和产业(2022年4期)2022-05-06
成都信息工程大学学报(2021年4期)2021-11-22
世界地质(2021年1期)2021-04-07
中国农村水利水电(2020年5期)2020-06-15
水利规划与设计(2020年1期)2020-05-25
科技传播(2019年24期)2019-06-15
北京航空航天大学学报(2017年9期)2017-12-18
中成药(2017年10期)2017-11-16
智能系统学报(2017年5期)2017-01-22
海军航空大学学报(2015年1期)2015-11-11