空间遥感智能载荷及其关键技术
2013-03-05 08:03尤政王翀邢飞孙婷
航天返回与遥感 2013年1期
尤政王翀邢飞孙婷
(1清华大学精密仪器与机械学系,北京 1 00084)(2清华大学精密测试技术及仪器国家重点实验室,北京 1 00084)
1 引言
最近几年,欧美发达国家研制的高分辨率光学卫星的几何定位精度大幅提高,为了降低成本,提高成像品质,此类卫星一般采用轻量型、小型化、灵巧型设计。例如,法国SPOT-5卫星达到了50m的定位精度,利用单个控制点定位精度可达15m[1];1999年发射的Ikonos-2图像地理定位精度在无地面控制点条件下达到15m[2];其后,美国的QuickBird-2卫星地理定位精度在无地面控制点条件下达到16m[3];2007年发射的WorldView-1卫星在无控制平面定位精度达到5m。目前,全球最高分辨率的商业卫星Geoeye能提供优于4m的无控制点定位精度;法国发射计划中的Pleiades卫星其无地面控制点地理定位精度也将能达到3m[4]。为了增强光学遥感载荷的空间、时间分辨力,相机光学系统一般采用离轴TMA系统或同轴三反射Cassegrain系统扩大视场[5-7],同时应用卫星姿态机动实现侧摆和俯仰推扫成像,获得更大的幅宽和成像灵活性,满足多任务的需要。但是,伴随成像分辨率和任务灵活性的提高,也出现了诸多亟待解决的技术问题,如实时成像控制、参数策略调整、卫星精密姿态控制技术、事后图像增强及修复技术等。为实现高分辨率空间光学成像和准确的几何定位,国外先进的高分辨率光学卫星很多都采用了类似于智能载荷的先进设计理念和先进技术手段,将测量系统与相机一体化集成设计,提高了光轴指向确定精度,减少了姿态确定误差的传递。目前国际上尚未有直接的智能化载荷系统出现,但在姿轨测量及成像一体化系统方面已取得了一些重要成果。本文介绍的实时定姿定位高精度一体化智能载荷是将姿态测量系统、遥感相机进行结构一体化集成及数据的深耦合设计,突破各种空间光学关键技术设计而成的,具有在轨实时调整成像控制策略,数据处理和分析及高精度定姿定位能力和图像处理能力的遥感系统。
2 智能载荷系统一体化技术
为了适应未来对地观测卫星的需求,突破相关技术瓶颈,提高遥感器的寿命和可靠性,降低整星质量和功耗,减少整星研制测试周期,获取更高品质的遥感观测图像,本文提出实时定姿定位高精度一体化智能载荷技术,将实现星敏感器、MEMS陀螺、GPS与高精度遥感相机为一体的智能载荷系统。这一技术可提高卫星有效载荷比、空间分辨力、时间分辨率和图像定位精度,实现轻量化、低功耗、较短研制周期和获取高品质遥感图像的目标。智能载荷集高精度实时定姿定位技术、星上数据分析处理、目标识别与跟踪、成像控制、策略调整功能于一体,显著增强对地观测任务的灵活性和适用性,大幅提高在轨成像分辨率和像质。系统将在较少的人工干预下,独立完成并优化航天侦察、测绘等对地观测任务。
传统星、载分立式设计中,因姿态测量部件与成像系统结构布局的紧凑性不强,星敏、陀螺的测量数据与成像载荷实际姿态运动存在较大的误差,且存在信息延迟。实践证明,测量误差因平台姿态运动和颤振尤为显著,降低了空间相机成像控制调节的实时性和精度,最终影响遥感成像品质。智能载荷采用星、载结构一体化设计理念,一方面有利于优化系统结构,减少冗余,实现轻量化;另一方面通过姿态测量部件的优化布局设计,提高了系统的集成度,有利于实现在轨实时成像控制与像移匹配,提高成像动态调制传递函数。
2.1 一体化结构设计
智能载荷系统采用姿态敏感器与空间相机一体化设计的理念,包括两个星敏感器、一个IMU测量单元以及相机系统。综合考虑力、热、光等多学科特点,对传统各学科分立式设计仿真流程进行整合,构建协同仿真的一体化平台,设计数据由协同仿真平台统一管理。以高性能成像为优化目标,分属于不同学科的设计需求,依照不同理论体系将众多需求转换为各学科相应的设计输入,每个学科应用各自的设计方法和工具进行设计,同时将结果反馈给协同仿真平台,此平台根据优化策略和目标完成智能载荷结构的自动迭代优化设计。
智能载荷姿态敏感单元由微型高精度星敏感器、MEMS陀螺仪组合而成,并利用双频高精度GPS辅助系统,进行高精度的天文导航、惯性导航和卫星导航等多元数据融合。其中,星敏感器和微惯性仪表采用集成安装基准结构,既减小了总体结构尺寸又保持较大的结构刚度。两个星敏感器与IMU单元构成一个独立的高精度姿态测量体,星敏感器采用一体化双视场构型,3个MEMS陀螺采用与星敏感器结构集成安装设计方式。如图1所示。
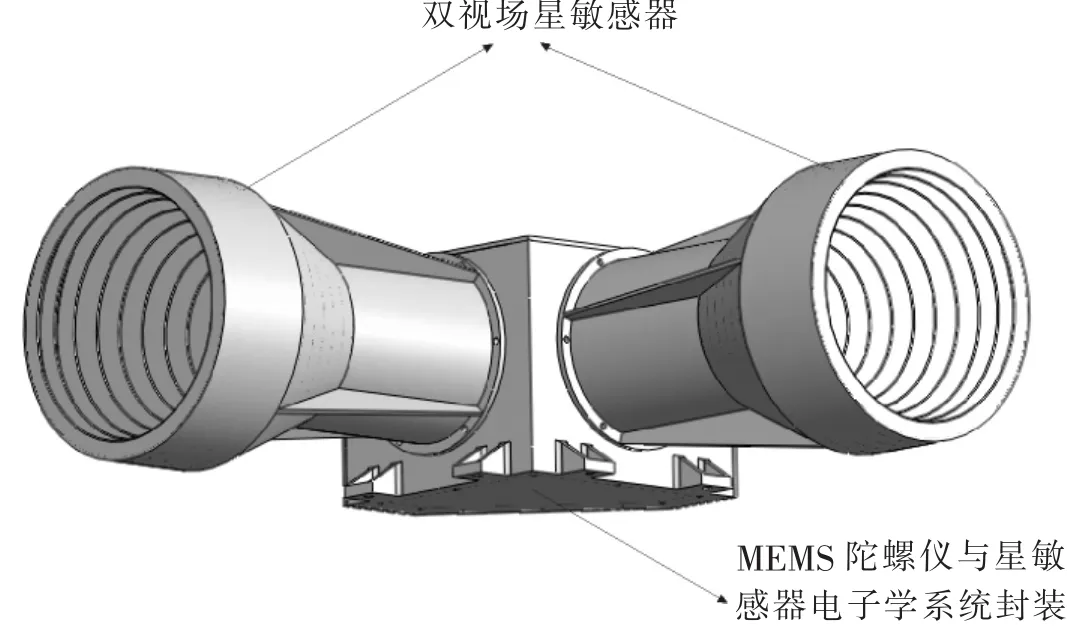
图1 一体化实时定姿定位系统结构Fig.1 Structure of integrated system of real-time position and attitudedetermination
将姿态测量单元按照一定的角度安装在相机的主承力板上。为保证系统在侧摆和前后摆等多种成像模式下的正常工作,需要综合考虑太阳、地球等。
基于光线对于星敏感器的影响,设计出一种最优的组合方式,保证两个星敏感器的光轴保持垂直,在各种工况下保证星敏感器的光轴与太阳夹角大于38°,与地气光夹角大于25°。考虑到轨道的偏移和变化、卫星的运行模式等因素,通过STK仿真计算在卫星寿命期间卫星的轨道面与太阳矢量的角度关系(如图2所示),确定两者之间的最小夹角。

图2 太阳矢量与轨道面的夹角在一年中的变化Fig.2 Variation of the anglesbetween sun vector and satellite orbital plane
智能载荷的一体化设计结构如图3所示。在结构设计上还应尽量减少环境温度变化对系统的影响。为了消除温度对智能载荷系统产生的影响,需要对系统进行热补偿,使系统在一个较大的温度范围内保持较好的结构稳定性和成像品质,从而能够在较大温度范围的环境下正常工作。除了传统光机结构中的机械主、被动式热补偿技术及光学被动式热补偿技术以外,在一体化的设计方案中还特别加入了影响智能载荷性能的电子学部分的热控措施,由于相机焦平面、CCD焦平面和MEMS陀螺系统紧凑,整体的质量和热容量较小,且整体工作温度一致,可以实现很好的电子学热包覆和控制。

图3 智能载荷系统一体化结构Fig.3 Structureof smart payload system
在动力学特性方面,卫星结构颤振能够对遥感器光学系统产生扰动,其中高频颤振对成像品质的影响在小卫星系统中表现尤为突出。鉴于此,智能载荷系统与卫星平台采用微振动隔振设计方案,星敏感器与MEMS陀螺由于与相机焦面的刚性连接,能够最大程度地抑制卫星平台高频颤振对遥感器成像品质的影响,低频姿态运动的影响较易通过行频—像速的实时匹配消除。
2.2 智能载荷定姿定位技术
智能载荷定姿定位系统采用星敏感器图像与陀螺进行深耦合的方法对相机姿态进行主动测量。该方法将MEMS陀螺高精度的数据深耦合到星敏感器的图像层面,将星点成像的PSF模型、探测器像素间的cross talk模型(图4)、APS探测器(图5)的rolling shutter模型与MEMS陀螺测量模型进行结合,构造出高动态的星点成像追迹方式,实现实时动态高速星点成像,类似于长期推扫的方法计算出星点的运行,将原来星敏感器的星图识别从帧转移的概念转移到行转移的概念上,并从理论层面上解决频率在20Hz以内的微振动的主动测量。

图4 Crosstalk模型Fig.4 Cross talk model

图5 APS卷帘曝光模式Fig.5 APSrolling shutter mode
采用星敏感器与MEMS陀螺组合,提供相对于惯性系的姿态与角速率参数,GPS提供轨道参数信息以及相对于轨道系的坐标变换基准参数;轨道确定部分由于涉及到力学模型递推等环节,计算量较大,智能载荷定姿定位系统采用EKF滤波;姿态确定部分要求满足高动态、高精度、实时性要求,故采用平方根SSUKF滤波算法。为了应对非同步、周期不确定的多源信息融合过程,并提高系统可靠性,需要系统在采样时点对各通道的多速率敏感器信息更新情况进行识别,进而调整多源信息的融合结构;识别矢量敏感器的视场受限情况,并通过重构充分利用冗余传感器的信息,保证系统整体的工作不间断;根据统计规律对各敏感器进行故障监视与诊断,通过系统重构对故障敏感器进行隔离。
智能载荷定姿定位算法软件原理如图6所示:

图6 智能载荷一体化定姿定位系统算法原理Fig.6 Algorithmsof attitude and position determination for smart payload
此算法通过SR-SSUKF定姿算法并结合GPS的输出,提高MEMS陀螺、星敏感器的姿态测量的精度和输出频率,实现了各传感器的数据深耦合,为在轨实时定姿定位、卫星姿态控制和载荷相机系统的成像控制提供了重要的测量数据。
3 基于数据深耦合的高分辨率成像技术
智能载荷的相机与姿态测量系统在结构设计上相对紧凑,数据深耦合,通过独立于卫星平台的载荷计算机实现高精度实时定姿定位、高分辨率成像的分析决策、优化控制、参数调整等功能。
3.1 智能载荷相机成像链与像质
为了适应未来光学遥感任务对空间分辨率、时间分辨率和光谱分辨率的要求,智能载荷侧摆成像实现对目标异轨重访,俯仰成像实现对目标的立体成像。这些工作模式对遥感器光学设计、成像控制单元与AOCS单元的协作、载荷计算机的在轨决策处理能力都提出了更高的要求。在相机光学系统、电子学系统、目标辐射特性和大气条件确定的情况下,在轨动态MTF主要决定于像移匹配的精度。智能载荷相机控制器应用实时姿态测量数据作为输入量,计算像移速度及偏流角,根据像速场的分布确定各TDICCD的行频,保持曝光积分时序与像速的同步;确定焦面偏流机构的转动角度,控制CCD推扫方向与像速方向的对准。
几乎所有遥感相机在大角度侧摆与大角度俯仰成像模式时的焦面像速场分布较平飞模式时表现出更强的非线性。行频与偏流机构的控制对光流相轨迹的匹配必定存在系统误差,且因不同像元而异。主要原因为:1)各CCD安装在焦面的位置差异及同一CCD的不同像元位置的像速大小和方向均不同。2)同一CCD在同一时刻各像元均保持同一行频积分。3)焦面TDICCD平行交错拼接决定偏流机构的转动角度不能使所有像元的偏流角得到完全补偿。4)相机姿态测量数据误差和传输延迟引起行频的计算结果与实际像速存在偏差。以某遥感器为例,各工作模式的焦面像速绝对值与偏流角分布如图7~9所示。由以上分析可以看出这些系统误差直接决定了遥感图像的动态传函,在大角度姿态机动且积分级数较多时,图像退化更加明显。因此像速匹配控制的优劣势必成为遥感相机成像链各环节中“木桶效应”的短板,同时也是通过合理设计能够有效改善的环节。

图7 平飞模式在焦面坐标系中瞬态像速模量与偏流角分布Fig.7 Imagevelocities and deflect angles distribution for level off imaging mode

图8 大角度侧摆模式在焦面坐标系中瞬态像速模量与偏流角分布Fig.8 Image velocitiesand deflect angles distribution for side looking 38°

图9 大角度俯仰模式在焦面坐标系中瞬态像速模量与偏流角分布Fig.9 Image velocitiesand deflect anglesdistribution for pitching 38°
3.2 智能载荷在轨成像控制
智能载荷姿态测量单元与光学相机在结构上的一体化设计及在数据上的深耦合,极大提高了测量数据的精度和实时性。根据姿轨实时测量数据,应用高效像速算法计算瞬态像速场分布,由智能载荷相机控制器优化确定CCD行频及偏流机构最优控制策略,通过CCD成像电子学单元及偏流机构机电控制系统实现像速的最优匹配,确保重点目标成像品质接近衍射极限,提高动态传函和信噪比,获得高分辨率和解析度的0级遥感图像。
智能载荷系统的综合数据分析处理单元具有对图像的数据压缩和初步分析功能,以实现对重点目标识别和判读,并通过智能载荷高精度实时定姿、定位能力锁定重点目标位置,并可进入目标跟踪模式。成像控制系统将识别信息与姿轨测量数据进行融合确定最优算法,并通过姿态机动完成对重点目标在同一轨的多次高清晰跟踪成像。这一技术大幅提高了遥感器的灵活性、任务效率和精确度。系统架构及控制原理如图10所示。

图10 智能载荷数据融合及成像控制原理Fig.10 Data fusion and image formation control of smart payload
遥感卫星姿态的测量精度和带宽对确定影像拍摄时段的相机运动状态、动态推扫时CCD图像传感器行频-像速失配误差及偏流角跟踪补偿误差有着重要意义。这些物理量的确定可直接决定图像各像素点的动态成像匹配误差,进而通过图像去卷积算法精确反演和恢复原始图像,消除运动模糊。目前,国内外报道的所有星敏感器测量精度与陀螺仪的测量精度和带宽,均不能满足对曝光时间内像点相对感光区域亚像元漂移的预测需求,难以对图像PSF反卷积核精确估计。针对这一问题,智能载荷系统研发了一种基于遥感器成像控制数据的焦面CCD交错拼接图像重叠条带的密集配准采样技术,由于将实时定姿定位数据应用于图像配准算法中掩模图像的预处理,配准精度优于0.1像元。由于先验知识的引入使得配准准确度较一般空域配准算法(如灰度相关配准、Sift算法等)显著提高。根据这一技术所测量CCD拼接条带图像配准偏移量经动态成像光流方程的逆向计算,可反演求解遥感器姿态高精度数据和因空间环境引起的光学系统镜头、安装畸变量等重要数据信息。因为图像最高采样率可达到TDICCD行转移频率,遥感器姿态测量带宽亦可达到这一量级,即数百至数千赫兹以上,事后姿态测量精度和带宽远高于传统实时姿态测量仪器。这一技术不仅适用于图像的像移失配精算和去卷积恢复,而且可以用于星敏和陀螺的数据标定,真正实现了星敏、陀螺、相机的数据融合,为智能载荷在轨成像策略及控制方法的调整提供了重要的支持,极大地增强了遥感器的性能和智能化水平。
4 智能载荷系统标定测试技术
智能载荷的一体化设计、安装和数据耦合方案,决定了必须研制与之匹配的一体化的测量、标定及测试方法,主要包括实验室标定测试和外场成像测试,对各种在轨成像功能进行模拟,对其性能予以测试评价。
4.1 一体化测量方法
为了保证星敏感器、MEMS陀螺仪等姿态敏感仪器和相机的安装标定,在地面安装时应将它们调整到规定的几何精度。几何精度包括两个方面:相机壳体结构精度和仪器设备的安装精度。用光学方法进行测量时,在被检测仪器和设备上设置光学基准,只要把被测产品测量特性转化为一个平面反射镜,就可以实现用光学方法进行精度测量。对于星敏感器和相机,可以用垂直于光轴的平面镜来代替光轴。精度测量系统采用非接触式大尺寸测量系统,这个系统既可以测量目标的角度,又可以测量其坐标值。
4.2 智能载荷实验室测试
利用20m焦距平行光管和转台,进行智能载荷的室内靶标成像试验,包括静态目标的推扫成像、智能载荷陀螺闭环下的行频自匹配推扫和动态目标发生器成像等。目标主要有:刀口靶标、星点靶标、放射状分辨率靶、Nyquist频率条纹靶及变透过率辐射目标靶等,可对弥散斑、分辨率、传递函数和辐射分辨率进行检测。通过智能载荷的陀螺闭环行频自匹配推扫,在定量评价成像品质的基础上,验证智能载荷成像控制的自主性。通过配合平行光管使用的动态目标发生器,模拟智能在轨成像过程,获得智能载荷在不同状态下的传递函数特征,为图像的评价提供依据。同时,在室内成像中进行智能载荷主点、主距和畸变的标定测试。利用星点靶标和平行光管构成具有空间角度的平行光束,通过转台转动对星点成像进行像点坐标测量,转台读取角度数据,获得用于智能载荷标定的测量数据,为定位精度的计算提供依据。
4.3 外场天体成像测试
智能载荷各组件功能的全面测试在夜间进行,为星敏感器的工作创造条件。智能载荷可以实现自主驱动转台,控制相机捕获天体目标和对目标的推扫成像。应用具有高度准确星历及姿态运动的月球等近地行星作为曲面成像目标,模拟智能载荷对地成像中各种规律。测试对行星表面指定区域的高精度像速匹配拍摄。考虑月球相对地球的姿态运动(即月球天平动)引起的成像条件变化,基于姿态测量数据实时计算这一特定目标区域的精确像速(考虑月球曲率引起像速畸变及偏流角畸变),在月历周期内不同时间对月球同一区域(如边界分明的环形山)进行高精度像速匹配成像。
测试试验的设计思想是应用天文学中月球天平动可使同一月历内月球相对地球可视范围为59%这一规律,月面同一区域在月历周期内相对地球的位形发生了变化(与地球自转效应相当)。进行多次推扫试验,均保持月球相对相机相同的平动速度(通过地、月轨道及相机姿态运动控制,其效果与对地观测卫星姿态运动产生的效应相当)。与此同时,事先应用JPL—DE421(包括章动和天平动,月球插值精度优于1m)星历参数建立计算月球与地球相对位置坐标与速度的切比雪夫插值解析多项式。利用相关天文学参数计算月球相对地球的几何天平动,通过像速公式精确计算这一目标区域在相机坐标系中的像速和偏流角,载荷控制器将这些成像控制量实时发送至相机控制机构及CCD成像单元进行动态推扫成像。
应用外场天体成像试验所获取的试验成像数据对载荷成像性能(MTF、地面分辨率)、辐射性能(辐射分辨率、信噪比、动态范围与响应线性度)、几何性能(几何定位精度等)、图像品质(亮度、方差、对比度、清晰度、信噪比、角二阶矩、综合质量等)进行分析与评估,对载荷成像性能进行验证。
5 结束语
本文论述的实时定姿定位高精度一体化智能载荷的各项关键技术是针对当代空间遥感器对成像分辨力、任务灵活性和智能化的需求的研究成果。通过姿态测量系统与光学相机的一体化设计,强化了遥感载荷轻量化及姿轨数据与成像数据的融合,全面提高了相机成像控制和系统定姿定位精度;基于数据深耦合的图像条带的测量实现了高精度和宽带姿态反演测量,使得通过相机图像对星敏和陀螺的进行互校成为可能,能够精确计算图像各点因姿态颤振引起卷积核,实现图像的非盲反卷积恢复,较传统盲反卷积图像恢复具有更多的先验信息。针对智能载荷的特点而开发的智能载荷系统标定和测试技术,实现了在地面对载荷原理样机姿态测量与成像的全面检验。
(References)
[1] FIGOSKIJW.The QuickBird Telescope:The Reality of Large,High-quality,Commercial Space Optics[J].SPIE,1999,3779:22-30.
[2] COOK M K,PETERSON B A,GENED,et a1.IKONOSTechnical Performance Assessment[J].SPIE,2001,4381:94-108.
[3] 韩昌元.近代高分辨率地球成像商业卫星[J].中国光学与应用光学,2010,3(3):202-208.HAN Changyuan.Recent Earth Imaging Commercial Satellites with High Resolutions[J].Chinese Journal of Optics and Applied Optics,2010,3(3):202-208(in Chinese)
[4] Pleiades Programme Overview[M].Presentation of SPOT Image Direct Receiving Station Meering,2006.
[5] 薛鸣球,沈为民.轻小型高分辨率TDICCD相机的光学设计[M].北京:科学出版社,2005.XUEMingqiu,SHEN Weimin.Optical Design of Light TDICCD Camera with High Resolution[M].Beijing:Science Press,2005.(in Chinese)
[6] MICHAEL B.Handbook of Optics[M].McGRAW-HILL,INC.,1995.
[7] 韩昌元.高分辨力空间相机的光学系统研究[J].光学精密工程,2008,16(11):2165-2171.HAN Changyuan.Study on Optical System of High Resolution Space Camera[J].Optics and Precision Engineering,2008,16(11):2165-2171.(in Chinese)
[8] SERGEEV P A,GOGOLEV Y A,ZVONKOVA V V,et al.Collimator Equipment of Large Optical Test Facility Vertical for Testing Space Telescope[J].SPIE,1995,2478:348-358.
猜你喜欢
水上消防(2022年2期)2022-07-22
学生天地(2020年3期)2020-08-25
汽车观察(2018年9期)2018-10-23
电子制作(2018年17期)2018-09-28
智富时代(2018年8期)2018-09-28
智富时代(2018年8期)2018-09-28
北京航空航天大学学报(2017年9期)2017-12-18
北京航空航天大学学报(2016年9期)2016-11-16
电子制作(2016年21期)2016-05-17
诗选刊(2015年4期)2015-10-26