
基于主分量寻踪与分析的炮弹炸点检测
2013-02-28 08:07:38秦晓燕袁广林
兵工学报 2013年10期
秦晓燕,袁广林
(解放军陆军军官学院 管理工程系,安徽 合肥230031)
0 引言
炮弹炸点定位是射击校射、毁伤评估和反火力打击中敌方火力位置估计的基础。目前炮弹炸点定位方法通常采用激光仪进行测量,该方法存在人为目视误差,且实时性较差,利用图像信息快速、精确地检测并定位炮弹炸点对于信息化战争具有重要的意义。本文研究的是基于图像的炮弹炸点检测方法,它是基于图像的目标检测问题。
基于图像的炮弹炸点检测是特殊的运动目标检测问题,基于图像的运动目标检测方法主要有2 种思路:1)不依赖于先验知识,直接从图像序列中检测出运动目标;2)利用目标的先验知识对运动目标建模,然后基于模型匹配检测目标。围绕这2 种思路,已经提出了一些运动目标检测方法[1],其中,有代表性的目标检测方法是背景减法和基于机器学习的检测方法。根据背景图像的建模方法不同,背景减法可分为高斯模型(包括混合高斯模型)、码书、本征背景等方法[2-6]。背景减法在静态背景和噪声较少的情况下检测效果较好,并且在实时性方面具有较优的性能,但是背景减法对动态背景下的目标检测性能较差。基于机器学习的目标检测方法[7-10]把目标检测问题看作二分类问题,该方法通过样本学习建立分类器实现目标检测,该类方法对静态和动态背景下的目标检测均适用。受到基于Adaboost 的目标检测方法[7-8]的启发,文献[10]提出了基于Adaboost 的炮弹炸点检测方法。该方法根据炮弹炸点的特点,对Haar特征进行了扩展,增加了一种中心环绕的Haar 特征,利用Adaboost 算法训练炮弹炸点分类器,利用训练的炮弹炸点分类器实现炸点检测。文献[10]的方法对简单背景下的炮弹炸点检测效果较好,但是它在2 个方面存在不足:1)对复杂背景下的炸点检测误检率较高;2)利用Adaboost 算法训练的单类炸点分类器检测炸点,无法满足炮弹炸点形态具有多样性的实际情况,尽管可以训练出多类炸点分类器实现检测,但是建立一个完备的炸点样本库较难。
根据视频图像连续帧之间具有的灰度相关性,文献[11]提出利用鲁棒的主分量分析(PCA)可以将视频图像数据矩阵分解成低秩和稀疏2 部分,其中,低秩部分对应背景信息,稀疏部分包含目标信息。考虑到实际应用中测量噪声的存在,文献[12]对文献[11]提出的鲁棒PCA 进行了改进,提出了主分量寻踪(PCP)方法,实现对存在测量噪声的视频图像数据矩阵的低秩与稀疏恢复。另外由于目标的运动连续性,序列图像中运动目标的位置向量会形成近似线性的运动轨迹,利用PCA 可以提取目标的运动特征。本文提出一种基于PCP 与PCA 的炮弹炸点检测方法,该方法首先利用PCP 从序列图像中恢复出前景图像序列,然后利用PCA 提取前景序列中候选目标的运动特征实现炮弹炸点检测。与文献[10]提出的炮弹炸点检测方法不同,本文方法根据序列图像之间的灰度相关性和炸点在序列图像中的运动连续性,利用PCP 和PCA 进行炸点检测,较好地解决了文献[10]提出的炸点检测方法的不足。
1 基于PCP 与PCA 的炮弹炸点检测
1.1 检测方法概述
本文提出基于PCP 和PCA 的炮弹炸点检测方法是将PCP 和PCA 相结合实现炮弹炸点检测,基本思路是将炮弹炸点检测分成前景恢复和炸点检测两个阶段,该方法的流程如图1 所示。

图1 基于PCP 与PCA 的炮弹炸点检测流程框图Fig.1 Flow chart of blast point detection based on principal component pursuit and analysis
前景恢复阶段任务是检测出候选目标,即所有的运动目标。首先利用PCP 对炸点图像序列构建的矩阵D 进行低秩与稀疏恢复,由于运动目标(包括炸点和由于摄像机抖动而导致背景变化的区域)在D 中具有稀疏性,因此恢复的稀疏矩阵就是包含运动目标的前景图像序列,然后对前景图像序列分别进行自适应阈值分割和膨胀处理即可得到运动目标检测结果,也称为候选目标检测结果。
候选目标可能是炸点目标也可能是变化的背景区域,因此还需要从候选目标中将炸点检测出来,这也正是炸点检测阶段的任务。由于炮弹炸点在图像序列中的运动具有连续性,而变化的背景区域则没有这一特点,所以可以利用目标的运动特征来判定炸点,具体流程是首先建立候选目标的运动轨迹,然后对每一个候选目标的运动轨迹分别进行PCA,计算它们的运动特征值,最后根据运动特征值的大小判定候选目标是否为炸点。
1.2 基于PCP 的前景恢复
定义观测矩阵D =[I1,…,Ik,Ik+1,…,In]∈Rm×n,其中,Ii∈Rm(i=1,…,n)为一帧图像按列存储形成的向量,I1,…,Ik为炸点爆炸前的背景图像,Ik+1,…,In为被检测的连续帧图像,则D 可以分解成以下3 部分[12]:

式中:A 为低秩矩阵,对应背景图像,由于背景图像之间具有较强的灰度相关性,因此A 具有低秩性;E 为稀疏矩阵,对应前景图像,即序列图像中变化的区域,由于摄像机和炮弹爆炸位置之间有一定的距离,炮弹炸点在整个图像中的成像只占很小的一部分像素,且炸点在相邻帧中是变化的,因此对于D来说,炸点区域具有稀疏性;Z 为噪声矩阵,对应测量噪声,由于成像机制本身的制约,测量噪声分布在每一个像元,但其能量有限[13]。文献[12]证明了在‖Z‖F小于某个值的条件下,(1)式可以看作如下优化问题:
图2 候选目标检测结果Fig.2 Detection results of candidate targets
式中:‖·‖*、‖·‖1和‖·‖F分别为矩阵的核范数、l1范数和Frobenius 范数和平衡因子λ =max (m,n)-1/2,本文利用加速近端梯度(APG)[14]算法求解(2)式。利用(2)式对炮弹炸点图像序列D 进行低秩与稀疏恢复,得到的稀疏矩阵E 就是前景序列图像,其中包含着炸点目标,对前景序列图像进行自适应阈值分割、膨胀处理后可得到目标检测结果。
图2 给出了利用上述方法进行前景恢复的实验结果,在该实验中观测矩阵D 的构造参数n 和k分别为15 和10.图2(a)为待检测图像序列,图2(b)为图2(a)的前景恢复结果,图2(c)为图2(b)进行自适应阈值分割后的候选目标检测结果。从图2(c)以看出,炸点目标区域不完整,存在断裂的情况,这会影响炸点检测的精度,因此需要利用膨胀操作将断裂的目标区域进行连接。图2(d)给出对图2(c)进行膨胀处理后的候选目标图像,可以看出膨胀操作使炸点目标连接成较完整的区域。
1.3 基于PCA 的炸点检测
从图2(d)的运动目标检测结果可看出:通过前景恢复不但分割出了炸点目标,还分割出了其他变化区域,这是由于变化的背景区域也具有稀疏性,而被作为稀疏误差恢复到稀疏矩阵中所导致的,因此,在前景恢复的基础上还需要做进一步判决来检测炸点目标。炮弹炸点在序列帧中的运动具有连续性,在视频采集频率足够高的条件下,可将炸点在连续4 ~5 帧的运动近似为线性模型,所以在时空三维空间里,图像序列中炸点的位置向量会形成近似线性的运动轨迹,如图3(a)所示。但是由随机噪声或相机的抖动产生背景变化区域不具有这种特性。基于炮弹炸点轨迹的这一性质与其他候选目标轨迹的不同,可以将炮弹炸点与其他候选目标分开,为此,本文定义运动轨迹的线性度和运动方向2 个特征。

图3 炸点运动轨迹Fig.3 Motion trajectory of blast point
定义1 目标的线性度:目标的线性度定义为目标运动轨迹短轴与长轴之比。设目标运动轨迹的短轴为s,长轴为l,则目标的线性度为

定义2 目标的运动方向:目标的运动方向定义为目标轨迹的长轴方向与x 轴(横轴)方向的夹角,设长轴方向为向量v,x 轴方向为x =[1,0]T,则目标的运动方向为

利用PCA 可以求得目标轨迹的短轴、长轴以及长轴方向,进而计算出目标的线性度和运动方向两个特征值,最后根据特征值的大小判定候选目标是否是炸点。综上所述,可建立基于PCA 的炸点检测方法1。
方法1:基于PCA 的炸点检测方法
输入:候选目标的运动轨迹
输出:检测结果
1)读取第i 个候选目标的运动轨迹Pi=[x1i,
2)求解Pi的协方差矩阵Ci.
3)计算Ci的2 个特征值λmin和λmax(λmin<λmax)及特征向量emin和emax(其含义如图3(b)所示),令s=λmin,l=λmax,v=emax.
4)利用(3)式和(4)式分别计算目标的线性度σ和目标的运动方向d.
5)如果σ≤ε 且t1<d <t2(ε =0.45,t1=π/6,t2=5π/6),则判断第i 个候选目标为炸点。
方法1 中候选目标的运动轨迹建立过程如下:
1)顺序访问第一帧候选目标检测图像中的候选目标,初始化候选目标的运动轨迹P =[P1,…,Pn],其中为第i 个候选目标在第一帧图像中的位置向量。
对第k(k=1,…,t)帧候选目标检测图像,执行步骤2).
2)在轨迹Pi的空间邻域N ={x|(x -≤r}中搜索目标,r 为区域N 的半径。若在N 中不存在候选目标则将Pi删除;若存在候选目标则将与最近邻的候选目标的位置向量加入到Pi中。
表1 给出了图2 中炸点的运动轨迹及其运动特征值,该炸点形成的运动轨迹是一条垂直于横坐标且向上运动的直线,因此其线性度和运动方向2 个特征值均满足炸点的判断条件。
2 实验与分析
为了验证本文方法的有效性,对100 组不同背景、不同形状的真实炸点图像序列进行测试。实验数据为352 像素×288 像素的256 级灰度图像序列,是利用可见光摄像机在晴好天气下获取,采集的帧频为24 帧/s,水平视场角和垂直视场角分别为14.5°和10.9°,炮弹爆炸位置(检测目标)距离观察所(摄像机所在位置)为1.5 ~2.5 km,目标尺度变化范围为5 像素×5 像素~15 像素×15 像素。实验是在Intel Pentium Dual-Core 2.8 GHz/1.87 GB 内存,MATLAB 2010 平台进行。另外为验证提出方法的优越性,和基于Adaboost 算法的炸点检测方法[10]进行了比较。
表1 炸点的运动轨迹和特征值Tab.1 Motion trajectory and feature values of blast point
图4 和图5 给出了2 种检测方法的结果,对于简单背景下的炸点利用2 种方法均能准确检测,如图4(a)和图5(a)所示。对比图4(b)和图5(b)可以看出,虽然2 种方法都能检测到炸点,但在炸点位置的检测精确度方面,本文方法优于文献[10]方法。由于文献[10]是利用训练得到的炸点分类器检测炸点,其检测结果取决于被检测图像块的Haar 特征,对那些Haar 特征和炸点相似的区域,往往会被误检为炸点,因此对于复杂背景下的炸点,文献[10]中的方法存在误检,如图4(c)和图4(d)所示;而本文方法对复杂背景下的炮弹炸点检测没有出现误检的情况,如图5(c)和图5(d)所示,这是因为本文方法充分利用了静态背景下视频序列的低秩性,利用PCP 将前景图像从序列中恢复出来,并利用PCA 提取炮弹炸点的运动特征实现检测,从而避免了背景的干扰。另外炸点的形态各异,不能保证训练的分类器能够适用于所有类型炸点,图4(e)炸点5 是一个跳弹炸点,由于其Haar 特征与训练样本的Haar 特征有较大区别,出现了漏检,而本文方法不依赖炸点的视觉特征,因此对呈现不同爆炸形态的炸点均能有效检测(图5(e)),具有较好的通用性。表2给出了本文方法对图5 中的5 个炸点检测得到的炸点在图像中位置。
图4 文献[10]方法的检测结果Fig.4 Detection results of method in Ref.[10]
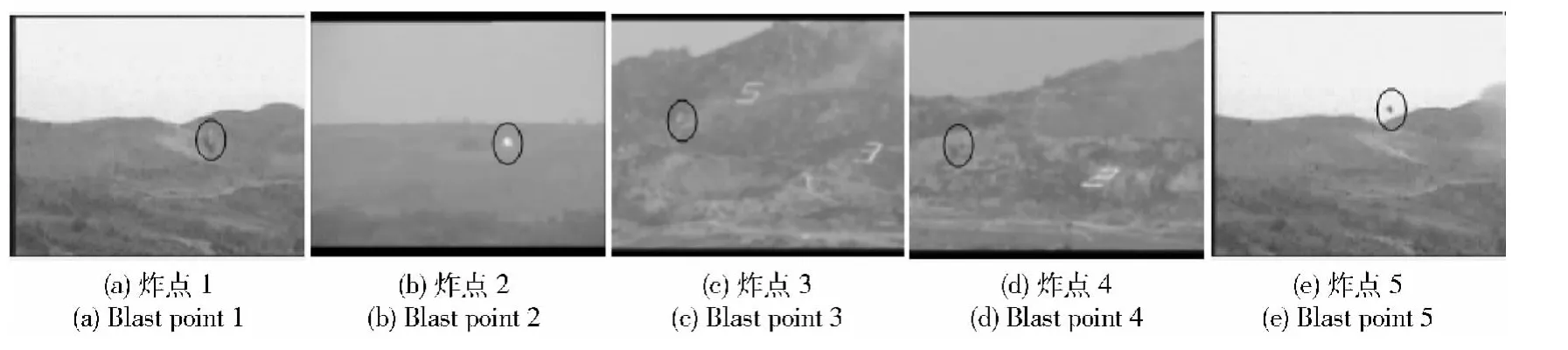
图5 本文方法的检测结果Fig.5 Detection results of the present method

表2 图5 中炸点在图像中的位置Tab.2 Position of blast points in Fig.5
为进一步说明本文方法的有效性,利用目标检测常用的评价方法召回率和精度曲线(RPC)[2]和平均检测性能柱状图对2 种检测方法进行比较,图6 和图7 中的相关指标定义分别为:
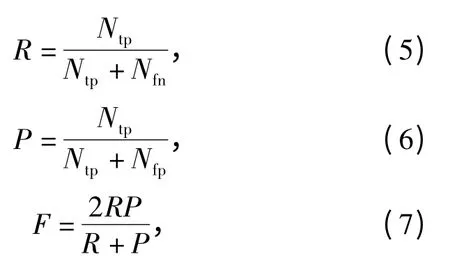
式中:Ntp为正确检测到的目标个数;Nfn为漏检的目标个数;Nfp为误检的目标个数;R 为召回率;P 为准确率;F 为根据P 和R 给出的一个综合评价指标。
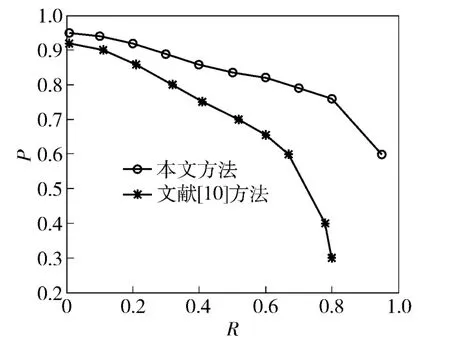
图6 2 种方法的RPCFig.6 RPC of two methods
为得到本文炸点检测方法的RPC,设定不同的阈值对稀疏图像进行分割,从而得到不同的检测效果,同时给出文献[10]方法的RPC,如图6 所示。需要说明的是,由于本文提出的方法是利用图像序列实现炸点检测,而文献[10]的方法是对单帧图像进行检测,本文规定对同一个炮弹爆炸后在不同帧中出现的炸点定义为一个炸点,因此在利用文献[10]中的方法进行实验时,任何一个炸点的检测需要对包含该炸点的连续5 帧图像分别进行检测,在任何一帧中检测到该炸点均认定检测成功,如果在多帧中均检测到这一炸点也认定检测到的是一个炸点,另外由于文献[10]方法不适用于复杂背景下的炸点检测,因此文献[10]方法的RPC 只是对简单背景下的炸点检测效果,而本文检测方法的RPC 是对100 组数据进行实验的结果。通过对2 种方法的RPC 和图7 中给出的2 种方法的平均检测性能可以直观看出本文方法在误检率和检测准确率方面均优于文献[10]的方法。
本文方法在对100 组实验数据检测的平均时间为1.51 s,而文献[10]检测一个炸点的速度要快得多,这是由于本文的检测方法需要对多帧图像序列进行处理,而文献[10]的方法是对单帧图像进行检测,因此在检测实时性上前者不如后者。但与传统的人工定位炸点的时间相比,本文方法的检测速度基本能满足毁伤评估系统的要求。

图7 2 种方法的平均检测性能Fig.7 Average performance of two methods
3 结论
针对文献[10]方法对复杂背景下的炮弹炸点检测误检率高以及难以建立通用分类器的问题,本文提出了基于主分量寻踪与分析的炮弹炸点检测方法。该方法根据静态背景序列图像的灰度相关性,利用PCP 方法恢复前景图像序列,从中检测出候选目标,候选目标除炮弹炸点外,还可能是背景的变化区域,利用经典的PCA 方法提取目标运动轨迹线性度特征和运动方向特征,由于炸点与背景变化区域的运动特征之间存在较大差异,根据特征值的大小即可实现炮弹炸点检测。实验表明,本文方法在检测准确率、误检率方面均具有较好的性能,为提高检测速度,在运动目标检测阶段可以考虑采用更快速的低秩与稀疏恢复方法或采用并行算法。
References)
[1]Yilmaz A,Javed O,Shah M.Object tracking:a survey[J].ACM Computing Surveys,2006,38(4):1 -45.
[2]Benzeth Y,Jodin P M,Emile B,et al.Comparative study of background subtraction algorithm[J].Journal Electronic Imaging,2010,19(3):1 -12.
[3]Wang L,Wang L,Wen M,et al.Background subtraction using incremental subspace learning[C]∥International Conference on Image Processing.San Antonio:IEEE,2007,5:45 -48.
[4]Zivkovic Z.Improved adaptive Gaussian mixture model for background subtraction[C]∥International Conference on Pattern Recognition.Cambridge:IEEE,2004,2:28 -31.
[5]Tavakkoli A,Nicolescu M,Bebis G,et al.Non-parametric statistical background modeling for efficient foreground region detection[J].International Journal of Machine Vision and Applications,2009,20(6):395 -409.
[6]Kin K,Chalidabhonger T H,Harwood D,et al.Background modeling and subtraction by codebook construction[C]∥International Conference on Image Proceeding.Singapore:IEEE,2004,5:3061-3064.
[7]Viola P,Jones M.Robust real-time face detection[J].International Journal of Computer Vision,2004,57(2):37 -154.
[8]Grabner H,Nguyen T T,Grube B.On-line boosting-based car detection from aerial images[J].ISPRS Journal of Photogrammetry and Remote Sensing,2008,63(3):382 -396.
[9]胡墩,赵佳佳,曹原,等.基于显著性及主成分分析的红外小目标检测[J].红外与毫米波学报,2010,29(4):303 -306.HU Tun,ZHAO Jia-jia,CAO Yuan,et al.Infrared small target detection based on saliency and principal component analysis[J].Journal of Infrared and Millimeter Waves,2010,29(4):303 -306.(in Chinese)
[10]秦晓燕,王晓芳,陈萍,等.基于Adaboost 算法的炮弹炸点检测[J].兵工学报,2012,33(6):682 -687.QIN Xiao-yan,WANG Xiao-fang,CHEN Ping,et al.Artillery blast point detection based on Adaboost algorithm[J].Acta Armamentarii,2012,33(6):682 -687.(in Chinese)
[11]Candês E J,Li X D,Ma Y,et al.Robust principal component analysis?[J].Journal of the ACM,2011,58(3):314 -328.
[12]Zhou Z,Li X D,Wright J,et al.Stable principal component pursuit[C]∥International Symposium on Information Theory Proceedings.Austin:IEEE,2010:1518 -1522.
[13]胡谋发,董文娟,王书宏,等.奇异值分解带通滤波背景抑制和去噪[J].电子学报,2008,36(1):111 -116.HU Mou-fa,DONG Wen-juan,WANG Shu-hong,et al.Singular value decomposition band-pass-filter for image background suppression and denoising[J].Acta Electronica Sinica,2008,36(1):111 -116.(in Chinese)
[14]Ganesh A,Lin Z C,Wright J,et al.Fast algorithms for recovering a corrupted low-rank matrix[C]∥International Workshop on Computational Advances in Multi-Sensor Adaptive Processing.Aruba:IEEE,2009:213 -216.
猜你喜欢
火控雷达技术(2023年1期)2023-04-07 10:01:26
红蜻蜓·低年级(2022年4期)2022-05-13 18:06:12
读友·少年文学(清雅版)(2020年4期)2020-08-24 07:36:26
读友·少年文学(清雅版)(2020年3期)2020-07-24 08:57:04
兵器装备工程学报(2020年5期)2020-06-07 03:17:34
环球时报(2020-02-21)2020-02-21 06:13:37
成都信息工程大学学报(2019年6期)2019-08-13 03:30:52
作文大王·低年级(2019年2期)2019-01-23 11:35:18
现代装饰(2018年5期)2018-05-26 09:09:39
中国三峡(2017年2期)2017-06-09 08:15:29
