带复杂外形附体的AUV流体动力数值计算
2013-02-23 06:45:02王鹏宁腾飞杜晓旭孟鹏
兵工学报 2013年2期
王鹏,宁腾飞,杜晓旭,孟鹏
(西北工业大学 航海学院,陕西 西安710072)
0 引言
近年来随着任务的不断复杂化和多样化,携带多种附体(设备)一次航行完成多个任务的AUV 得到了大力发展。由于AUV 携带附体的外形复杂多样,其流动参数的精确计算是一个技术难点。
目前可得到AUV 流体动力参数的方法主要有经验公式估算法、模型试验法和数值计算法[1]。经验公式估算法形式简单,难以对带有复杂附体AUV的流体动力参数进行准确计算,预报精度有限;模型试验法周期长、耗资大,往往难以满足方案设计的进度要求;数值计算法发展日趋成熟,特别是一些商用力学仿真软件使计算流体力学(CFD)已越来越广泛地应用于AUV 设计之中,在很多情况下,数值计算已达到与模型试验相当的精度。如文献[2 -4]利用CFD 技术对带附体潜艇流场进行了数值模拟,得到了带附体潜艇阻力变化、压力变化与尾流场变化,并与试验结果进行了对比,证明了数值计算的可操作性,但是采用的都是简单外形附体(鳍、舵、指挥台),附体尺寸相对潜艇主体尺寸较小,对潜艇流场动力影响较小。
本文AUV 携带的附体主要是盐温深传感器(CTD)和GPS/北斗天线。CTD 用于测量水体的盐度、温度及深度;天线用于导航定位与信息传递。由于计算模型外形复杂,附体尺寸相对AUV 主体尺寸较大,数值计算时网格划分难度大,因此得到高质量网格也是本文重点工作。
本文利用流体动力学仿真软件CFX,对带有CTD 和天线的AUV 流体动力进行数值计算,得到了3 种模型下AUV 的流体动力变化规律,分析了不同附体对AUV 流体动力的影响,并与试验结果进行了比较分析,为携带复杂外形附体AUV 的工程设计提供了精确和实用的研究手段。
1 数值方法
求解粘性流动问题主要是解N-S 方程[5-6],对于湍流计算,本文采用雷诺时均N-S 方程(RANS),剪切应力输运模型(SST 模型)。
1.1 基本控制方程
不可压缩流动控制方程主要包括连续性方程和N-S 方程。
1)连续性方程 Δ

2)运动方程(N-S 方程)

式中:U 为速度矢量;ρ、p、g、μ 分别为密度、压强、重力加速度、 流体动力粘性系 数;Δ 为 散 度,Δ2为 拉 普拉斯算子。
1.2 SST 模型
SST 模型综合了近壁模型的稳定性和边界层外部模型独立性的优点,该模型能适应压力梯度变化的各种物理现象,适用范围广,计算模拟性能优;可应用粘性内层,通过壁函数的应用,精确地模拟边界层现象,无需使用较易失真的粘性衰减函数。所以,SST 模型在处理本文中不同雷诺数边界层问题时具有较好的适用性。
湍流强度k 方程:
湍流频率ω 方程:

式中:μt为湍动粘度;σk、σω分别为k、ω 方程的湍流能量普朗特数;α 为梯度产生的湍动能系数;β'、β分别为k、ω 扩散产生的湍动能系数。
2 AUV 模型及网格划分
2.1 AUV 模型主要参数
AUV 长度l,直径d;CTD 长度0.25l,最大直径0.35d,距头部端面0.035l;天线长度0.08l,高度0.5d,厚度0.175d,距头部端面0.5l.
AUV 模型见图1,CTD 模型见图2,天线模型见图3。由图1和图2可看出,CTD 外形复杂,而且采用支架与AUV 相连,不是常见的回转体,所以数值计算难度很大。

图1 AUV 模型Fig.1 AUV model

图2 CTD 模型Fig.2 CTD model

图3 天线模型Fig.3 Antenna model
2.2 网格划分
由于AUV 附体外形复杂,划分网格难度较大,而网格质量对数值计算结果影响很大,因此网格划分是本次工作的重点之处。本文利用Ansys ICEM对AUV 的流域划分结构化的六面体网格,流域为长15l,宽高均为12.5d 长方体。流域分为两部分,AUV 处于加密域。加密域分为CTD、天线和尾部3部分,单独划分网格,利用Interface 功能组合各部分网格,最终得到了高质量网格,提高了计算精度。网格如图4~图6.

图4 计算域网格Fig.4 Mesh of computational domain

图5 加密域网格Fig.5 Grid of encryption domain

图6 AUV 网格Fig.6 Grid of the AUV
2.3 计算模型
本文分3 种计算模型进行了数值计算,每种模型分-4°、-3°、-2°、-1°、0、1°、2°、3°、4°共9 种攻角与水平舵角来划分网格,网格数量为250 万左右,网格质量都在0.4 以上。
3 种模型如下所示:
模型1:主体(头部,平行段,尾部,鳍舵);
模型2:主体,CTD;
模型3:主体,CTD,天线。
2.4 CFX 数值计算边界条件设置
1)流体介质:水;湍流模型:SST;
2)速度入口:10 kn;压力出口:0 Pa;
3)计算域壁面A UV 壁面:无滑移壁面;
4)残差值取10-6;最大迭代步数:200.
3 计算结果及分析
3.1 流体动力变化及分析
3 种模型下AUV 流体动力变化曲线图如图7~图10 所示。
由图7和图8可以看出,随着攻角的增大,AUV 所受到的升力和俯仰力矩都不断增大,升力近似为线性增长,而俯仰力矩不随攻角的增大呈线性变化。

图7 升力随攻角变化Fig.7 Lifts changing with the attack angle

图8 俯仰力矩随攻角变化Fig.8 Pitching moment changing with the attack angle
由于附体的影响,AUV 升力有所减小,最多时减小2 倍;俯仰力矩增大,最多时增大4 倍。主要原因是CTD 外形与其安装位置所致:CTD 外形非流线型,受到的流体动力大大增加,又安装在AUV 头部,距AUV 浮心较远,导致其对AUV 的流体动力影响很大。
由图9和图10 可以看出,随着舵角的增大,AUV 所受到的升力不断增大,俯仰力矩不断减小,两者都近似为线性变化。由于附体的影响,AUV 升力减小,减小1.5 倍;俯仰力矩增大,增加3 倍。

图9 升力随舵角变化Fig.9 Lifts changing with the rudder angle

图10 俯仰力矩随舵角变化Fig.10 Pitching moment changing with the rudder angle
由图7~图10 可以看出,模型2 和模型3 两者曲线变化很接近,可以得到结论:AUV 加附体后流体动力变化主要由CTD 产生,CTD 对AUV 流体动力的影响大于天线和影响。
3.2 轴向表面压力变化及分析
由图11 可以看出,模型2、3 压力变化曲线基本重合(天线处不同),与模型1 压力变化曲线差别较大,曲线峰值多,表明AUV 表面压力变化很大。带附体后,表面最小压力点向AUV 头部前移并且相对压力值有所增大。模型1 最小压力点距AUV 头部0.030 0l 处,相对压力值为-12 000 Pa;模型2 和模型3 的都在距AUV 头部0.017 2l 处,相对压力值为-9 300 Pa,这主要是CTD 安装在AUV 头部,改变流场所致。

图11 3 种模型下AUV 轴向表面压力变化Fig.11 Surface pressure changing of the AUV in three models
3.3 流场变化及分析
由图12、图14 和图16 可以看出,AUV 所受流场压力主要集中在头部、CTD 和天线上,其中头部最大,CTD 次之,天线最小。由图13、图15 和图17可以看出,附体对流场速度变化影响很大。在CTD处,流场压力和速度变化复杂,导致AUV 流体动力参数有了很大变化。
3.4 阻力结果对比
为了分析数值计算结果的准确性,在中国船舶重工集团公司某研究所采用1∶1实物模型,在等雷诺数条件下,进行了风洞试验,如图18 所示,得到了精确的试验数据[7]。
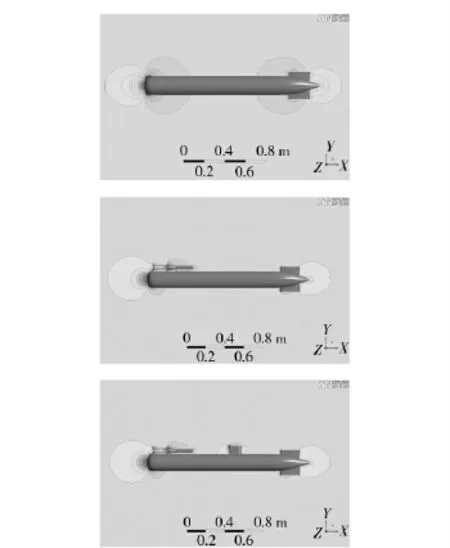
图12 流场压力图Fig.12 Pressure contour of the flow field

图13 流场速度图Fig.13 Velocity contour of the flow field

图14 CTD 流场压力图Fig.14 Pressure contour of the CTD
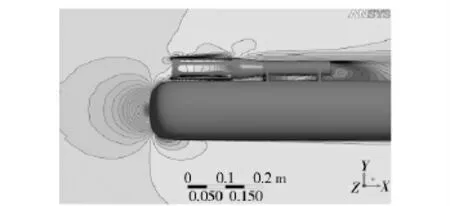
图15 CTD 流场速度图Fig.15 Velocity contour of the CTD

图16 天线流场压力图Fig.16 Pressure contour of the antenna
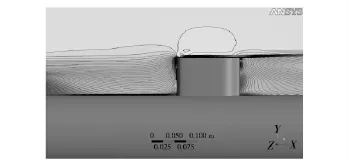
图17 天线流场速度图Fig.17 Velocity contour of the antenna
模型3 带有全部附体,其阻力系数数值计算结果C1与试验结果C2的对比,如表1所示。
由表1可以看出,本文中模型3 阻力系数数值计算结果与试验结果相差最大为5.6%,从而证明了本次数值计算方法的可行性,计算结果具有实用参考价值。

图18 风洞试验Fig.18 Wind tunnel test

表1 模型3 阻力系数仿真结果与试验结果对比Tab.1 Drag coefficient comparison with the experimental results of model 3
4 结论
本文采用UG 三维模型,Ansys ICEM 对AUV 三种模型进行结构化网格划分,并应用CFX 软件在10 kn速度下,对AUV 流场动力进行了定常数值仿真,得到了AUV 流场动力变化情况,并分析了附体对AUV 流体动力的影响,得到了以下结论:
1)模型1 时,随着攻角和舵角的变化,AUV 所受到的升力和俯仰力矩不断变化,近似为线性变化。模型2 和模型3 时,随着舵角的变化,AUV 所受到的升力和俯仰力矩近似为线性变化;随着攻角的变化,AUV 所受到的升力近似为线性变化,而俯仰力矩不呈线性变化。主要原因是CTD 外形与其安装位置所致。
2)AUV 加附体后流体动力变化主要由CTD 产生,CTD 对AUV 的影响大于天线。带附体后,AUV表面最小压力点向其头部前移,并且相对压力值有所增大。
3)AUV 所受流场压力主要集中在其头部、CTD和天线上,而且在CTD 处流场压力及速度变化复杂,导致AUV 流体动力参数有了很大变化。
References)
[1] 张宇文.鱼雷外形设计[M].西安:西北工业大学出版社,1998.ZHANG Yu-wen.Torpedo configuration design[M].Xi’an:Northwestern Polytechnical University Press,1998.(in Chinese)
[2] 李艳,姚震球.带附体潜艇尾流场的数值模拟与验证[J].江苏科技大学学报,2006,20(2):7 -12.LI Yan,YAO Zhen-qiu.Numerical simulation and validation of wake field of submarine with stern appendage[J].Journal of Jiangsu University of Science and Technology,2006,20(2):7 -12.(in Chinese)
[3] 卢云涛,张怀新,潘徐杰.全附体潜艇的流场和流噪声的数值模拟[J].振动与冲击,2008,27(9):142 -146.LU Yun-tao,ZHANG Huai-xin,PAN Xu-jie.Numerical simulation of flow—field and flow-noise of a fully appendage submarine[J].Journal of Vibration and Shock,2008,27(9):142-146.(in Chinese)
[4] 曾文德,王永生,杨琼方.全附体潜艇流噪声数值计算[J].兵工学报,2010,31(9):1204 -1208.ZENG Wen-de,WANG Yong-sheng,YANG Qiong-fang.Numerical calculation of flow noise of submarine with full appendages[J].Acta Armamentarii,2010,31(9):1204 -1208.(in Chinese)
[5] 景思睿,张鸣远.流体力学[M].西安:西安交通大学出版社,2001.JING Si-rui,ZHANG Ming-yuan.Fluid mechanics[M].Xi’an:Xi’an Jiaotong University Press,2001.(in Chinese)
[6] Evans J,Nahon M.Dynamics modeling and performance evaluation of an autonomous underwater vehicle[J].Ocean Engineering,2004,31(14 -15):1835 -1858.
[7] 潘子英,郑文涛.50 kg 级便携式自主观测系统风洞试验报告[R].无锡:中国船舶重工集团公司第七O 二研究所,2012.PAN Zi-ying,ZHENG Wen-tao.The wind tunnel test report of 50kg portable autonomously observation instruments[R].Wuxi:China Ship Scientific Research Center,2012.(in Chinese)
猜你喜欢
实验流体力学(2023年1期)2023-03-21 01:41:06
油气·石油与天然气科学(2021年7期)2021-09-10 04:16:51
舰船科学技术(2021年12期)2021-03-29 01:28:20
装备制造技术(2020年1期)2020-12-25 05:18:18
女报(2020年2期)2020-06-12 11:37:49
空间科学学报(2020年4期)2020-04-22 01:17:20
润·文摘(2020年2期)2020-03-09 06:17:12
中国机械工程(2018年21期)2018-11-13 08:54:18
柴油机设计与制造(2018年2期)2018-08-29 00:51:14
电子制作(2017年24期)2017-02-02 07:14:27