
基于改进Mean Shift和SURF 的目标跟踪
2013-02-22 08:08包旭,杜凯,田浩
计算机工程与应用 2013年21期
包 旭,杜 凯,田 浩
1.淮阴工学院 交通工程学院,江苏 淮安223003
2.长安大学 电子与控制工程学院,西安710064
1 引言
运动对象跟踪是计算机视觉领域的一个重要研究方向,在视频监控、机器人导航、自动驾驶、交通流量监测、天文观测、视频图像压缩和传输等方面都有广泛的应用。Mean Shift 最初作为一种聚类分析的方法由K.Fukunaga等人提出[1]。Yizong Cheng 等人对Mean Shift 算法进行推广[2]。Dorin Comaniciu 等人将Mean Shift引入到目标跟踪算法中,提出了基于核(Kernel-based)的跟踪算法[3-4]。
基于核的跟踪算法使用目标的归一化加权颜色直方图作为目标模式。由于颜色直方图是目标的整体统计特征,没有包含目标的空间信息,当目标和背景颜色分布相近时,容易导致不准确跟踪或跟踪丢失。文献[5]采用内中外三层的分块方法,空间信息结合颜色信息,生成空间颜色直方图,各块采用等权值法加权处理。文献[6]采用上下二分的分块方法跟踪曲棍运动员,这种分块方法适合于柱状对象。文献[7]提出了7 部分的分法,各块Bhattacharyya系数采用了算法平均值的方法,没有考虑各块相似度的变化对总体相似度的不同影响。文献[8]在文献[7]的基础上,结合人体特征,提出了适合人体的分块方法,且各块采用非等权值的方法加权处理。文献[9]提出了显著性加权的方法,根据目标中不同区域与背景的差别大小,赋予不同区域不同的权值。由于SURF、SIFT 等特征具有旋转、尺度不变性,对三维视角、光照变化具有很强的适应性,在遮挡和场景混乱时仍保持不变性等优势[10-12],文献[13]在MS 跟踪结果的基础上,采用SIFT 特征匹配寻找SIFT 匹配点集,通过计算仿射变换参数修正MS 跟踪结果。文献[14]结合颜色特征和SIFT 特征,通过MS 算法迭代,采用EM 框架寻找最相似区域,实现跟踪。文献[15]引入仿射变换,采用Bhattacharyya 系数将目标跟踪问题转化成仿射变换参数的最优化问题,实际中取得了不错的跟踪效果,但耗时较长。文献[16]中提出了自适应分块颜色直方图的跟踪算法,该算法能较好地解决部分遮挡、目标对象矩形变化时的跟踪问题,但在光照变化和快速运动的情况下,跟踪效果未能得到明显提高。
受文献[4-13,16]启发,本文提出一种融合改进MS 和SURF 的跟踪算法,该方法由改进的Mean Shift 跟踪算法(初定位)和SURF 特征匹配和校正(微调)组成。前者根据目标对象的最新外接矩形尺寸,确定对象的分块方法,根据各块的相似度大小,确定各块的权重系数;后者在前者跟踪结果的基础上,采用SURF 特征匹配和校正。最后,通过线性加权的方法融合改进MS 和SURF 的跟踪结果。实验表明,本文算法在目标发生旋转、尺度变化、光照变化和部分遮挡等情况下,都有很好的跟踪效果。
2 改进的Mean Shift跟踪算法
与传统的MS 跟踪算法[3-4]相比,改进的MS 算法主要由自适应分块方法和加权Bhattacharyya系数组成。
2.1 自适应分块方法
不同的运动对象常常具有不同的外观尺寸,同一运动对象也会随着运动的变化而发生方位和尺寸上的变化。因此,固定尺度和固定分块的方法常常不能满足变化的、复杂的情况。基于此,本文采用自适应的分块方法,自适应分块对于运动目标跟踪的实验效果,参见文献[16]。
假设包围运动对象的外接矩形如图1 所示。矩形的宽度为w,高度为h,定义目标对象宽度/高度比例因子k ,k=w/h,k 反映了目标对象外接矩形的外形特征,当k >1 时,外接矩形呈现“宽矩形”;当k=1 时,外接矩形为“正方形”;当k <1时,外接矩形呈现“窄矩形”;则k 有式(1)三种情况。


图1 目标对象的外接矩形
考虑到实际运动中,目标对象外接矩形常常处于“宽矩形”和“窄矩形”两种状态,正方形仅是动态目标对象外接矩形的临界状态,故此,结合文献[1,3,6]的分块方法和实验的需要,本文取参数kc为2,将目标对象划分为三种不同类型的分块方式,如图2 所示。
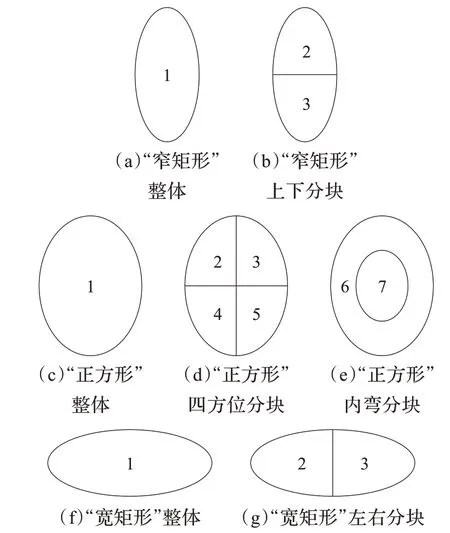
图2 自适应分块方法
2.2 加权Bhattacharyya 系数
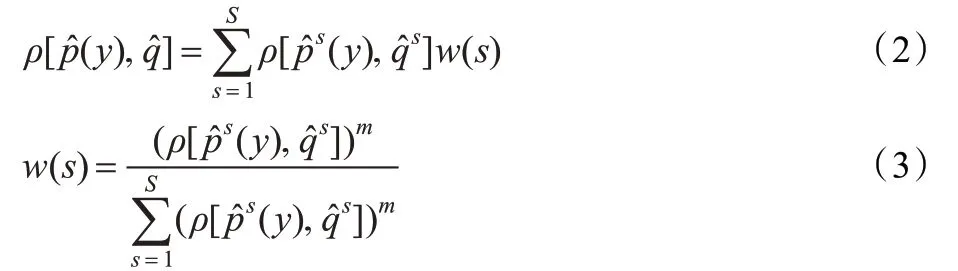
Bhattacharyya 系数用来衡量目标模式和候选目标模式的相似程度。文献[7]中Bhattacharyya 系数采用了平均值的方法,没有考虑各块相似度的变化对整体相似度的不同影响。借鉴文献[8-9]中各块加权处理的思想,本文根据各块的Bhattacharyya 系数的大小,相似度大的块,权重系数大,相似度小的,权重系数小。按照式(2)对各块进行加权处理,各块的权值由式(3)确定。
2.3 改进的Mean Shift算法步骤
初始第一帧,设当前目标对象外接矩形的尺寸为w0×h0,矩形中心为,计算宽度/高度比例因子k0=w0/h0,根据式(1)确定初始目标对象的分块方法,总的分块数记为S。根据文献[3]中式(21)计算目标模板的直方图s=1,2,…,S 。
步骤1读取下一帧图像,计算该帧图像位置候选目标的直方图,s=1,2,…,S,并计算

步骤2采用文献[3]中式(25)计算{wi},i=1,2,…,Np,其中和取整块的特征情况。
步骤3采用文献[3]中式(14)计算新的迭代位置,本文采用的是Epanechnikov 核函数。

步骤4计算位置候选目标的直方图2,…,S,计算
步骤5如果,则

步骤6若<ε,执行步骤7;否则,,执行步骤2。
步骤7根据当前目标对象外接矩形尺寸w×h,计算宽度/高度比例因子k=w/h,根据式(1)确定运动对象的分块方法,总的分块数记为S,执行步骤1。
3 融合改进Mean Shift和SURF 的跟踪算法
融合改进Mean Shift 和SURF 的跟踪算法由改进的Mean Shift(初定位)和SURF 特征匹配和校正(微调)组成,最终跟踪结果由两部分线性加权获得。其改进的MS 算法如上文1 章描述;SURF 特征匹配和校正(微调)由SURF 特征提取、SURF 特征匹配、特征点重心位移偏移量计算和跟踪结果校正四部分组成。其算法流程如图3 所示。

图3 融合改进的MS 和SURF 的跟踪算法流程
3.1 SURF 特征提取
SURF(Speed Up Robust Features)特征是由Bay 等人[11-12]提出,借鉴了SIFT 简化近似的思想,对DoH 高斯二阶模板进行简化近似处理,使得模板对图像的滤波只需要进行简单的加减法运算,又因为采用积分图像的方法,其运算时间与滤波模板的尺寸无关。实验表明,SURF 算法的运算速度是SIFT 的3 倍,综合性能优于SIFT 算法,其详细的算法详见文献[11-12]。
3.2 SURF 特征匹配
SURF 特征匹配采用特征点向量间的欧式距离作为相似性度量。设目标区中某个特征点向量为Va,找出与其MeanShift 跟踪结果(待校正区)中欧式距离最近的前2 个关键点向量Vb和Vc,如满足式(4),则接受该对匹配点,否则去除。其中t是一个给定的阈值,取为0.8[10]。

3.3 特征点重心偏移量计算
经过2.2 节SURF 特征匹配,目标区和待校正区对应的特征点集分别为P={(xi,yi),Vi},i=1,2,…,N和P′={(x′i,y′i),V′i},i=1,2,…,N。本文采用平均值的方法,计算待校正区对象相对于目标区对象的重心平均偏移量,如式(5)所示。

3.4 改进的MS 跟踪结果校正
设改进的MS 算法的跟踪结果为:

其中(xo,yo)表示矩形跟踪区域的中心坐标,vRadius表示矩形垂直方向的半径,hRadius表示跟踪矩形水平方向的半径。结合公式(5),校正后的结果如式(6)所示,其中rectSURF表示SURF 匹配和校正后的跟踪结果。

3.5 融合改进MS 和SURF 的跟踪结果
融合改进MS和SURF跟踪结果为rect,如公式(7)所示。

α为权值系数,介于0~1 之间,当改进的MS 算法Bhattacharyya 值较大时,则MS 算法跟踪结果较好,此时α取较大值;反之,α取较小值。实验中,为了简化融合算法的计算难度,本文α参数取为0.5,更进一步的自适应调节α参数的取值方法,有待于在后续研究中展开。
4 实验与分析
本文实验采用Epanechnikov 核,RGB 各子空间采用16个bin,共使用16×16×16 个bin,每帧图像的最大迭代次数设为10 次,实验视频数据简要描述如表1 所示。

表1 实验视频数据简要描述
4.1 改进的Mean Shift算法初步跟踪
“PETS2006S2-T3-C4”序列#784 帧图像,人体受到他人遮挡,文献[4]算法调整自身尺度,顺利实现跟踪,但跟踪大小小于对象实际大小,如图4(a1)所示;文献[7]算法跟踪大小基本保持与对象大小相同,但跟踪中心与对象实际中心有较大偏差,如图4(b1)所示;而本文提出的改进的MS算法采用加权Bhattacharyya 系数法,受遮挡的块相似度较小,其对应的权重系数较小,未遮挡块相似度较大,其权重系数较大,有效地削弱了受遮挡块对整体相似度的影响,保持了与对象相同的大小,跟踪中心与对象实际中心也较好地吻合,如图4(c1)所示。

图4 改进的Mean Shift算法与文献[4]、文献[7]算法在发生遮挡,复杂背景,光照变化和仿射变换情况下的跟踪性能对比
“OneBagBoy.avi”视频#3 057 帧图像,人体裤子的颜色与背景车辆颜色相同,文献[4]算法只考虑了整体区域颜色的统计信息,没有考虑空间信息,所以跟踪结果出现较大偏差,跟踪结果向上偏移,如图4(a2);文献[7]算法采用图2(c)~(e)的分块方法,其跟踪大小基本保持与对象大小相同,但因各块取平均值的方法,其跟踪中心与对象实际中心存在一定偏差,如图4(b2);而本文提出的改进的MS 算法根据人体外接矩形尺寸,采用上下二分的方法,有效地避免了文献[4]向上偏移的跟踪结果,且因为采用加权Bhattacharyya 系数的方法,有效地保证了改进的MS 算法跟踪中心与对象实际中心较好地吻合,如图4(b3)。
“DavidIndoor.avi”视频#755 帧图像,人脸发生光照变化,可以看出,文献[4,7]和改进的MS 算法均存在不同程度的跟踪精度或跟踪丢失,分别如图4(a3)、(b3)、(c3)。
4.2 SURF 特征匹配和校正
(1)SURF 特征匹配和特征点重心偏移量计算
在改进的MS 算法跟踪结果的基础上,提取待校正区的SURF 特征,作目标区和待校正区的SURF 特征匹配,其匹配效果如图5 所示。右侧图内部蓝色矩形为改进的MS算法的跟踪结果,考虑到改进的MS 算法跟踪结果(待校正区)与实际的对象有位置上的偏移,实验中,将待校正区扩大0.5 倍,即右侧图外部虚线的矩形区域,保证搜索区中包含目标对象,以增加匹配的鲁棒性。
(2)本文算法与文献[4]和文献[14]的跟踪性能比较
表2 是文献[4],文献[14]与本文跟踪算法平均跟踪误差(均值±标准差)和跟踪时间的比较结果。图6(a1)~(a3)是文献[4]算法的跟踪结果;图6(b1)~(b3)是文献[14]算法的跟踪结果;图6(c1)~(c3)是本文算法的跟踪结果。

图5 SURF 特征匹配和特征点重心偏移量计算
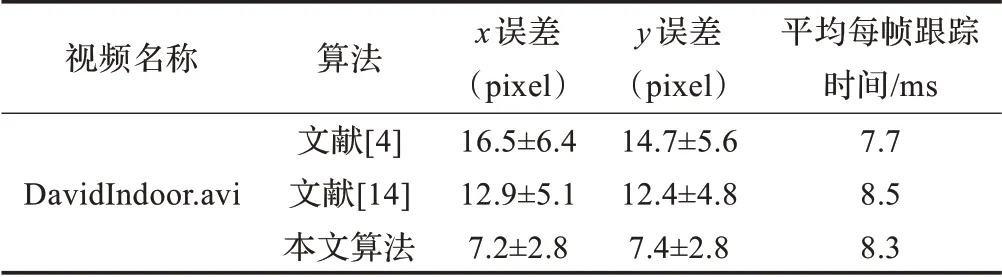
表2 平均跟踪误差(均值±标准差)和跟踪时间比较

图6 本文算法与文献[4]、文献[14]算法在光照变化情况下的跟踪性能对比
由表2 可以看出,在“DavidIndoor.avi”视频序列中本文算法的误差是最小的,跟踪时间略高于文献[4],但低于文献[14]。由图6 可以看出,文献[4]算法在视频#475、#635 和#830帧均产生跟踪漂移;文献[14]采用Mean Shift融合SIFT的算法,在视频#91 和#162 帧都能成功跟踪,但由于整体框架仍是Mean Shift 算法,故而仍存在一定偏差;而本文算法由于采用改进的MS 算法初步定位,采用SURF 匹配、校正对其MS 结果进行微调,之后融合MS 和SURF 结果,故而在#475、#635 和#830 帧都能准确地跟踪。
5 结束语
本文提出了一种融合改进MS 和SURF 的跟踪算法,改进的MS 算法能根据目标对象的最新外接矩形尺寸确定对象分块方法,根据各块的Bhattacharyya 系数值,确定各块的权重系数;在改进的MS 跟踪结果的基础上,采用SURF匹配和校正获得校正跟踪结果;最后,对两结果进行线性加权,获得最终的跟踪结果。实验表明,本文算法可以有效地跟踪部分遮挡、复杂背景、光照变换和仿射变换情况下目标对象,改善了传统MS 算法和固定分块MS 算法的局限性,提高了跟踪算法的鲁棒性。
[1] Fukunaga K,Hostetler L D.The estimation of the gradient of a density function,with applications in pattern recognition[J].IEEE Trans on Information Theory,1975,21(1):32-40.
[2] Cheng Y.Mean Shift,mode seeking,and clustering[J].IEEE Trans on Pattern Analysis and Machine Intelligence,1995,17(8):790-799.
[3] Comaniciu D,Ramesh V,Meer P.Real-time tracking of nonrigid objects using Mean Shift[C]//Proc of IEEE Conf on CVPR,2000:142-149.
[4] Comaniciu D,Ramesh V,Meer P.Kernel-based object tracking[J].IEEE Trans on Pattern Analysis and Machine Intelligence,2003,25(5):564-575.
[5] Xu D,Wang Y,An J.Applying a new spatial color histogram in Mean-Shift based tracking algorithm[C]//Image and Vision Computing,New Zealand,2005.
[6] Okuma K,Taleghani A,De Freitas N,et al.A boosted particle filter:multitarget detection and tracking[C]//Proc of the European Conference on Computer Vision,2004:28-39.
[7] Maggio E,Cavallaro A.Multi-part target representation for color tracking[C]//Proc of IEEE Int Conference on Image Processing(ICIP),2005:729-732.
[8] 袁霄,王丽萍.基于MeanShift 算法的运动人体跟踪[J].计算机工程与科学,2008,30(4):46-49.
[9] 张恒,李由,李立春,等.基于显著性加权的Mean Shift 跟踪方法[J].光学技术,2008,34(3):404-407.
[10] Lowe D G.Distinctive image features from scale-invariant keypoints[J].International Journal of Computer Vision,2004,60(2):91-110.
[11] Bay H,Tuytelaars T,van Gool L V.SURF:Speeded Up Robust Features[C]//ECCV,2006.
[12] Bay H,Tuytelaars T,Gool L V.SURF:Speeded Up Robust Features[J].Computer Vision and Image Understanding,2008,110(3):346-359.
[13] Chen A H,Zhu M,Wang Y H.Mean Shift tracking combining SIFT[C]//Proc of ICSP’08,2008:1532-1535.
[14] Zhou H Y,Yuan Y,Shi C.Object tracking using SIFT features and Mean Shift[J].Computer Vision and Image Understanding,2009,113(3):345-352.
[15] 李培华,肖莉娟.基于Mean Shift的相似性变换和仿射变换目标跟踪算法[J].中国图象图形学报,2011,16(2):258-266.
[16] 杜凯,巨永锋,靳引利,等.自适应分块颜色直方图的Mean-Shift跟踪算法[J].武汉理工大学学报,2012,34(6):140-144.
猜你喜欢
数学年刊A辑(中文版)(2020年2期)2020-07-25
国学(2020年1期)2020-06-29
山东农业工程学院学报(2020年12期)2020-03-19
中学生数理化·七年级数学人教版(2019年4期)2019-05-20
数学物理学报(2017年6期)2018-01-22
摄影之友(影像视觉)(2017年1期)2017-07-18
中学生数理化·八年级数学人教版(2017年4期)2017-07-08
湖州师范学院学报(2016年2期)2016-08-21
山西大同大学学报(自然科学版)(2016年6期)2016-01-30
地理与地理信息科学(2015年4期)2015-10-13
