电动汽车用五相永磁同步电机的容错控制策略
2013-02-10 06:13:36郑萍唐佩伦隋义王鹏飞王子安
电机与控制学报 2013年10期
郑萍,唐佩伦,隋义,王鹏飞,王子安
(哈尔滨工业大学电气工程及自动化学院,哈尔滨 150080)
电动汽车用五相永磁同步电机的容错控制策略
郑萍,唐佩伦,隋义,王鹏飞,王子安
(哈尔滨工业大学电气工程及自动化学院,哈尔滨 150080)
针对多相永磁容错电机在故障状态下输出转矩波动比较大这一问题,提出一种旨在减小电机在故障状态下转矩波动的最佳电流控制策略。通过电机的转矩波动向量图对电机在不同故障状态下的转矩波动进行分析,计算出电机在故障状态下的输出转矩,以转矩波动最小为目标计算出电机剩余相的补偿电流。通过联合仿真的方式对所提出的最佳电流控制策略进行验证,研究结果表明,采用以转矩波动最小为目标的最佳电流控制策略,电机在故障状态下的转矩波动降低50%以上。
永磁同步电机;容错;转矩波动最小;最佳电流控制;相量图
0 引言
电动汽车以其低噪声、低排放、高效节能等显著优点,逐渐引起世界各国的关注。电动汽车的发展有赖于技术的进步,尤其是需要进一步提高其动力系统的性能,降低成本并提高系统的可靠性。电机作为电动汽车驱动系统的动力来源,是电动汽车动力系统的核心[1]。相比较传统的三相电机系统,多相容错电机系统具有很好的容错运行性能[2-4],可以极大的提高电动汽车动力系统的安全性和可靠性,为电动汽车的动力执行机构提供一种新的解决方案。
对多相永磁容错电机本体的基本设计要求是,电机的相与相之间具有良好的电隔离、磁隔离、热隔离和物理隔离,以及具有抑制短路电流的能力[3,5-7]。当多相容错电机的某一相或某两相发生开路或者短路故障时,电机仍然具有一定的转矩输出能力,保证了电动汽车在故障状态下仍可继续运行,但是此时电机的输出转矩会下降很大,转矩波动大幅提高。针对多相电机在故障下的容错控制问题,国际上一般有这样几种处理方式:i)绕组发生故障时,通过切除故障相绕组,调整剩余相激励的幅值与相位,重构圆形旋转磁场,维持电机的持续、可靠运行[8-10];ii)以转矩波动最小为目标,通过施加电流关于故障相或d轴对称以及电流和为零等约束条件,注入三次谐波电流等,使输出转矩的二次谐波以及四次谐波为零,减小故障下运行的转矩波动[11,12];iii)以铜耗最小为目标,转矩脉动最小化为约束条件,设定一个价值函数,进而得到各相的输入电流,实现最优转矩控制[13,14]。最优转矩控制保证了电机铜耗与转矩波动最小,但是只对一相故障进行了分析,此外,其系统控制算法负载,完全依赖硬件的故障诊断和辨识,增加了系统复杂度。
本文提出了一种针对于五相容错永磁同步电机在故障状态下减小转矩波动的最佳电流控制策略。为了减小故障状态的转矩波动,必须对故障时电机的转矩波动产生的原因进行分析,找到故障时转矩波动的来源。首先采用转矩波动相量图法对电机在不同故障状态下的转矩波动进行分析,包括一相绕组开路、短路,相邻两相绕组开路、短路,一相绕组开路的同时伴随一相绕组短路等故障状态。通过推导电机在故障状态下的输出转矩,并令其为给定恒值,确保转矩波动最小,从而计算出剩余正常相的补偿电流[15]。最后对电机在补偿电流作用下的转矩输出进行仿真分析,并与故障后不采用控制策略时的转矩输出性能进行了比较。
1 故障状态下转矩波动分析
电机在故障状态下,如果不采用合理的电流控制策略,将会产生很大的转矩波动,并且不同类型的故障情况转矩波动的构成也不相同。下面对电机不同故障下的转矩波动进行了详细分析。
1.1 正常相绕组的转矩分析
假设五相容错永磁同步电动机各相绕组通入电流为五相对称正弦基波电流,相位互差2π/5电角度,其表达式为

式中,j=1,2,···,5,分别表示A,B,C,D,E相。
由于电机采用的是id=0的控制策略,当忽略绕组电阻时,空载反电势与电枢电流的相位角相同,此时每一相的空载反电势可以表示为

式中,ω、ψf分别表示电角频率和永磁体磁链的幅值。从而j相绕组的电磁转矩为
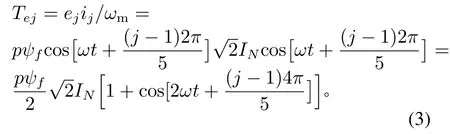
式中:ωm为电机的机械角频率;p为电机的极对数;IN为相电流有效值。通过式(3)中的转矩表达式可知此时的转矩不仅包括恒定转矩,还具有波动转矩成分。其转矩波动可表示成相量形式为

当电机正常运行时,由于各相转矩波动分量之间相位相差4π/5电角度,各相转矩波动分量相互抵消,五相绕组的合成转矩波动为零,此时电机的转矩输出仅有恒定分量。如果某相绕组发生开路故障时,此时开路相的转矩波动也会消失,剩余正常相绕组的转矩波动将不再会被完全抵消,此时总的电磁转矩中就会含有波动分量。
1.2 短路相绕组的转矩分析
当j相绕组发生短路时,如果忽略短路相绕组的电阻,短路状态下绕组中的各量之间的关系可以用相量图表示,如图1所示。由图1可知短路电流完全是去磁电流。由于在电机设计时将自感设计的较大,保证了具有较好的抑制短路电流的能力,并通过仿真分析得到短路电流幅值与额定相电流幅值基本相等,仅在相位上相差90˚电角度。
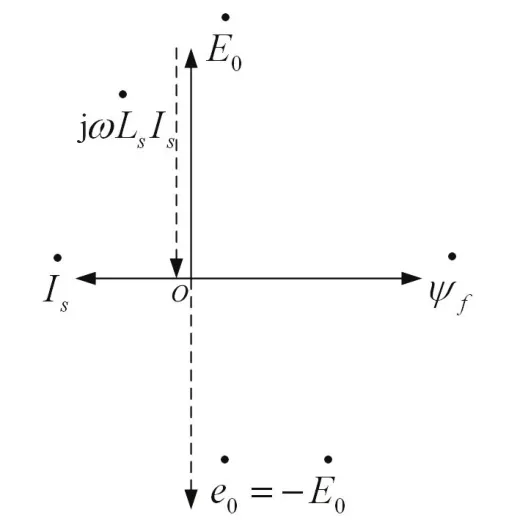
图1 短路相绕组的相量图Fig.1 Phasor diagram of short circuit phase
进而得出短路相的电磁转矩为

式(5)中短路相的转矩完全是波动分量,其相量表示为

2 不同故障状态下最佳补偿电流计算
电机的故障类型包括一相开路,一相短路,两相开路,两相短路,一相开路同时一相短路,并且两相故障还分别包括相邻两相故障和相隔两相故障。但是由于两相短路时,电机的运行情况较差,基本不能工作,将不对其进行分析,下面仅对剩余几种可以接受的故障情况进行补偿电流的计算。
2.1 一相故障

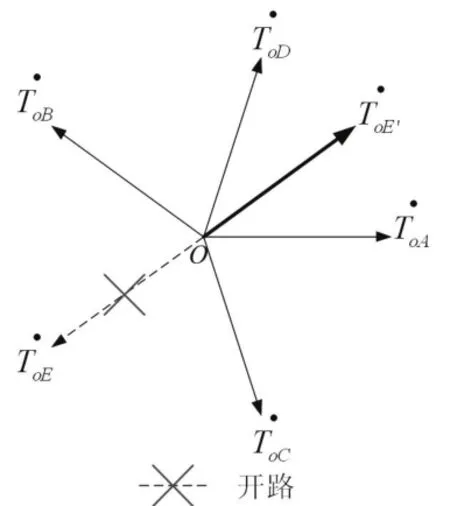
图2 E相开路时的转矩波动相量图Fig.2 Phasor diagram of torque ripple under open circuit of phase E
从图2的相量图可以得出此时转矩波动的幅值和相位,及转矩波动的表达式。那么总的电磁转矩为剩余四相的恒定转矩与转矩波动分量的和,此时总的电磁转矩表示为

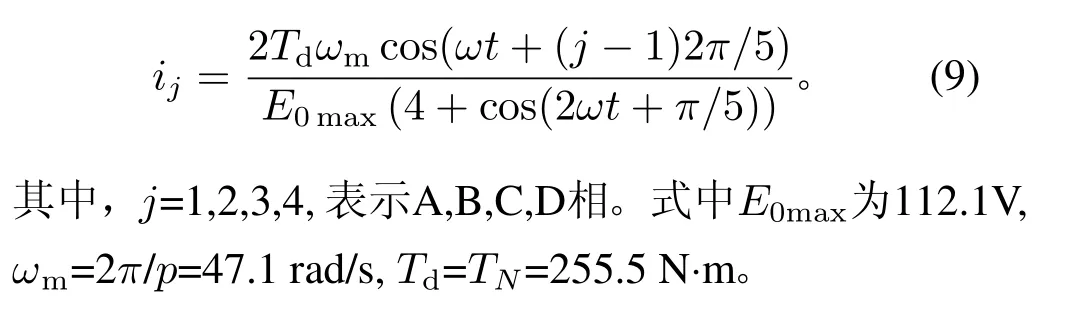
为了减小转矩波动,可以令此时的总的电磁转矩等于一个给定的恒定值Td,确保在转矩波动最小,从而推导出此时相电流有效值的表达式IN(t)。

式中E0max为空载反电势最大值。此时得到剩余相的补偿电流为
2)一相短路
其他类型故障情况下剩余相补偿电流的求取方法与一相开路时相类似。假设E相短路,E相绕组的转矩波动分量相位将会较正常相绕组的转矩波动滞后90˚电角度。此时E相绕组正常工作时的转矩波动将会消失,仅有短路转矩波动,如图3所示。

图3 E相短路时的转矩波动相量图Fig.3 Phasor diagram of torque ripple under short circuit of phase E
与一相开路时类似,先计算出故障时的转矩波动分量及恒定分量,即总的电磁转矩,然后推导出剩余相补偿电流为

式中j=1,2,3,4,分别表示A,B,C,D相。
2.2 两相故障
1)相邻两相开路
假设D、E两相开路,转矩波动相量图如图4。
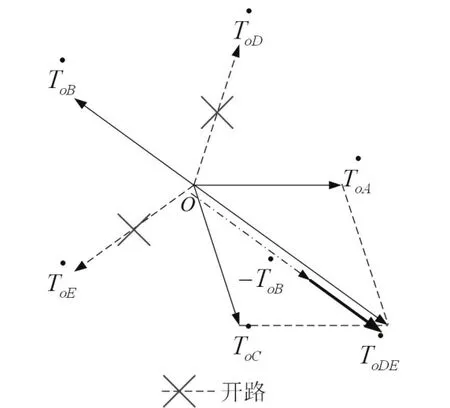
图4 D、E两相开路时转矩波动相量图Fig.4 Phasor diagram of torque ripple under open circuit of phase D and phase E
剩余正常相的补偿电流可以表示为
式中,j=1,...,3,分别表示A,B,C相。
2)相隔两相开路
假设C、E两相开路,转矩波动相量图如图5。
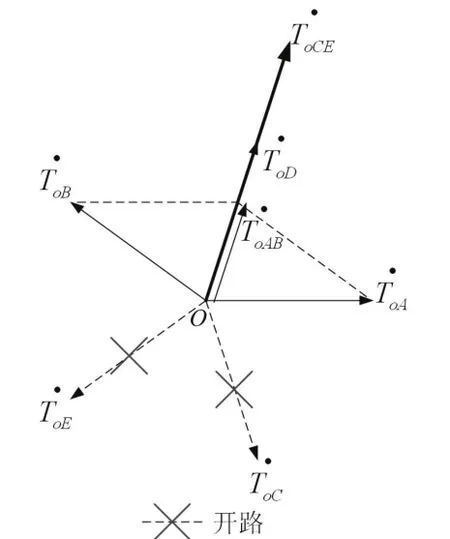
图5 C、E两相开路时转矩波动相量图Fig.5 Phasor diagram of torque ripple under open circuit of phase C and phase E
剩余相的补偿电流为
式中,j=1,...,3,分别表示A,B,C相。
3)相邻两相中一相开路一相短路
假设D相开路、E相短路,转矩波动相量图如图6。并计算出式(13)表示的剩余相补偿电流。
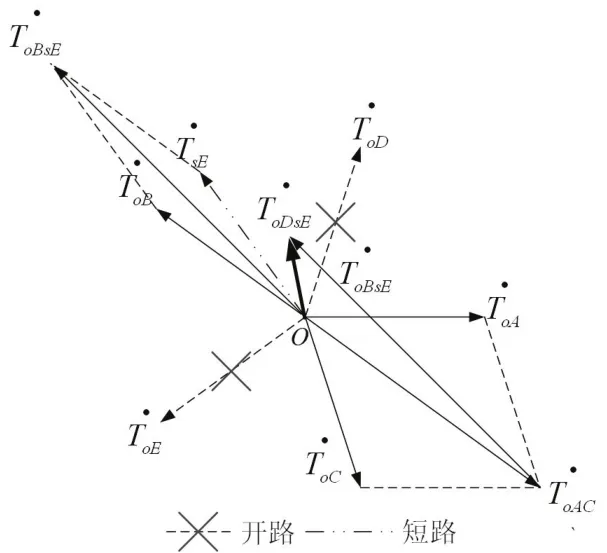
图6 D相开路、E相短路时的转矩波动相量图Fig.6 Phasor diagram of torque ripple under open circuit of phase D and short circuit of phase E
式中j=1...3,分别表示A,B,C相。
4)相隔两相一相开路一相短路
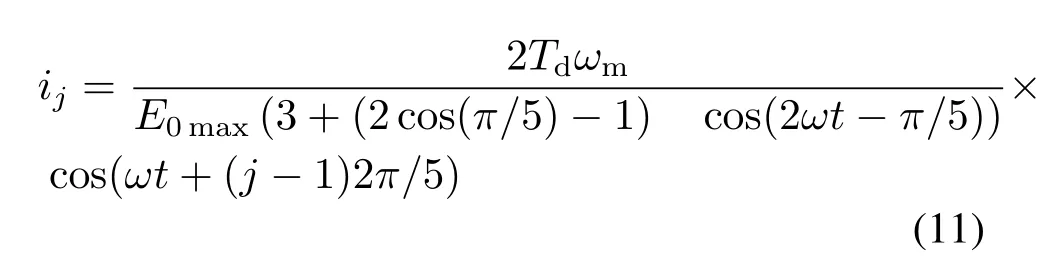
假设C相开路、E相短路,转矩波动相量图如图7。并计算出式(14)表示的剩余相补偿电流。

图7 C相开路、E相短路时的转矩波动相量图Fig.7 Phasor diagram of torque ripple under open circuit of phase C and short circuit of phase E

3 采用容错控制策略前后电机的转矩性能对比
式中,j=1,2,4,分别表示A,B,D相。
根据前面计算出的故障状态下剩余正常相的补偿电流,采用Flux-Simulink联合仿真对采用容错控制策略前后的转矩性能进行验证,如图8所示。
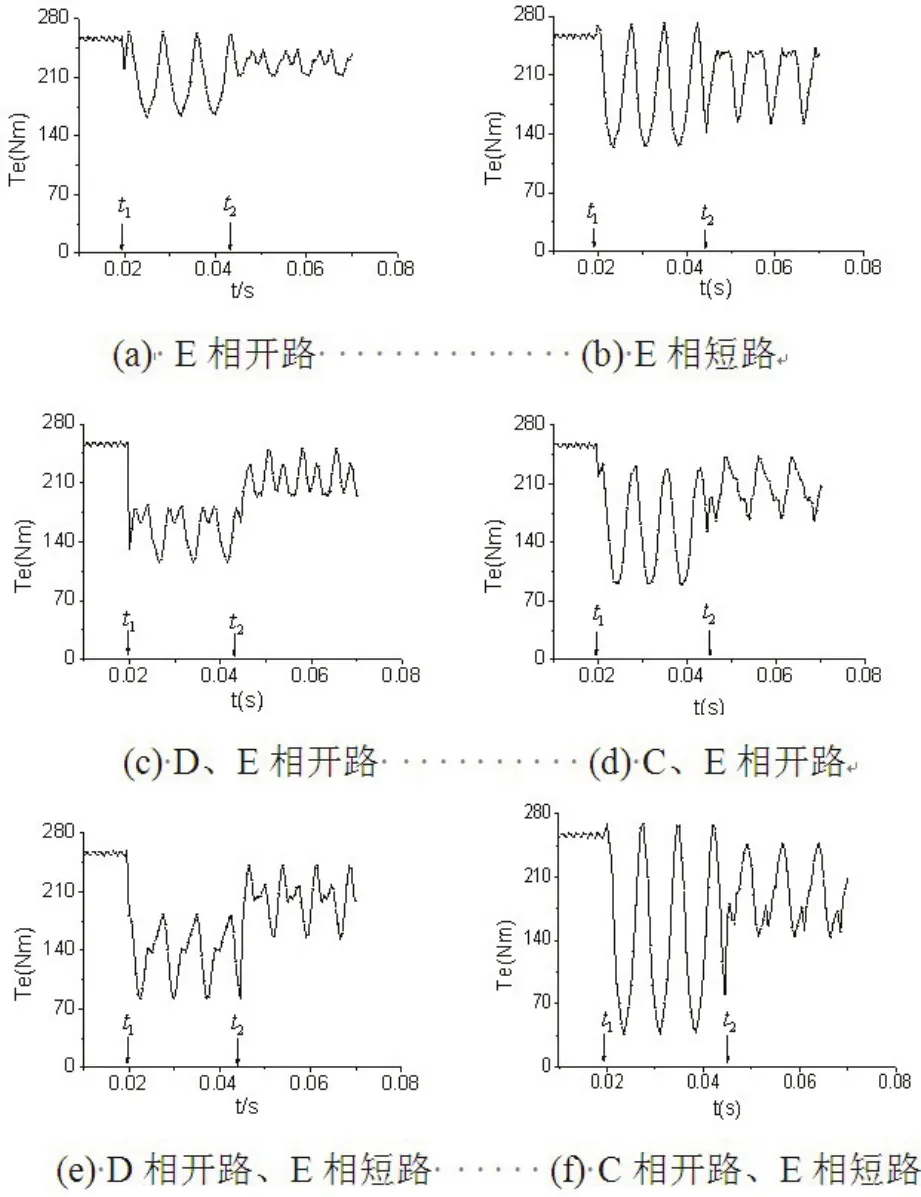
图8 不同故障状态下的转矩性能Fig.8 Torque performance under different fault conditions
在t1时刻电机发生故障,转矩平均值明显下降,转矩波动很大;t2时刻采用容错控制策略,剩余正常相施加补偿电流,转矩性能有了很大的改善。故障状态下补偿电流施加前后转矩性能对比分析如表1所示。
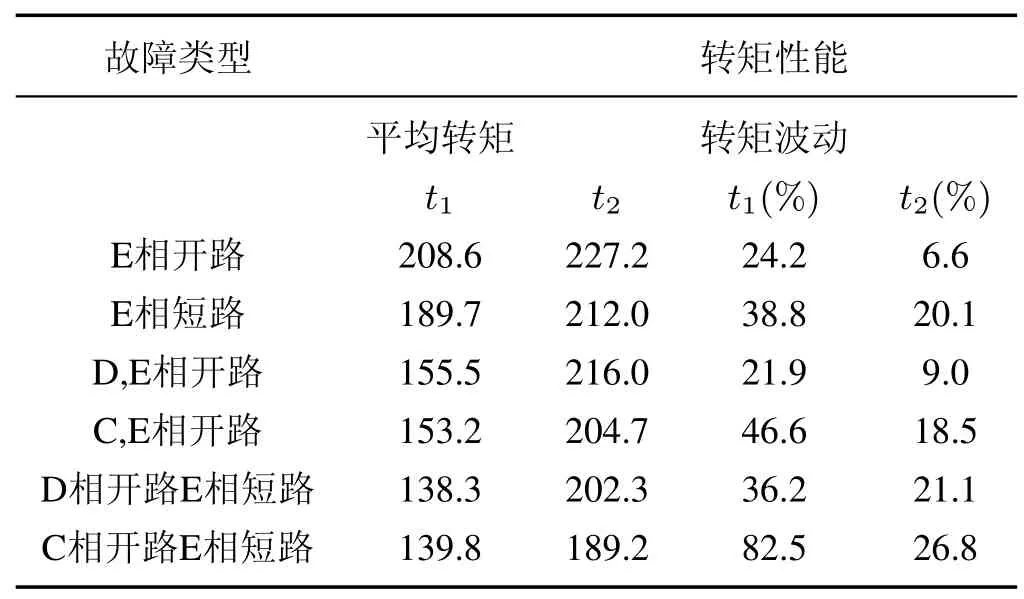
表1 不同故障状态下的转矩性能对比Tab.1 Torque performance under different faults
4 结论
1)对正常相绕组和短路相绕组的转矩成分进行分析。正常相绕组的转矩包含恒定分量和波动分量,而短路相绕组的转矩仅含有波动分量。2)通过绕组短路相量图,在忽略绕组电阻的情况下,短路电流完全是去磁电流。从而短路相绕组的转矩波动相位较正常相绕组的转矩波动相位滞后90˚电角度。3)根据转矩波动相量图计算出电机在不同故障状态下的转矩波动,继而得出故障时的总的转矩输出,以转矩波动最小为目标计算出剩余相补偿电流4)通过仿真对比分析,当采用容错控制策略时,转矩性能有了明显的改善,平均转矩显著提高,转矩波动均下降一半以上,控制效果较好。
[1]王书贤,邓楚南.电动汽车用电机技术研究[J].微电机,2006,39(8):83-85.
WANG Shuxian,DENG Chunan.Research on technology of motor on EV[J].Micromotors Servo Technique,2006,39(8):83-85.
[2]B C Mecrow,A G Jack,J A Haylock,et al.Fault tolerant permanent magnet machine drives[J].IEE Proceedings Electric Power Applications,1996,143(6):437-441.
[3]A G Jack,B C Mecrow,J A Haylock.A comparative study of permanent magnet and switched reluctance motors for high-performance fault-tolerant operation[J].IEEE Transactions on Industry Applications,1996,32(4):889-895.
[4]J A Haylock,B C Mecrow,A G Jack,et al.Operation of a fault tolerant PM drive for an aerospace fuel pump application[C]//IEE Electrical Machines and Drives Conference,1-3 Sep.,Cambridge,1997,No.444:133-137.
[5]J D Ede,K Atallah,J B Wang,et al.Effect of optimal torque control on rotor loss of fault-tolerant permanentmagnet brushless machines[J].IEEE Transactions on Magnetics,2002,38(5):3291-3293.
[6]L Parsa,H A.Toliyat.Fault-tolerant fi ve-phase permanent magnet motor drives[C]//The 39th IAS Annual Meeting of IEEE,3-7 Oct.,Seattle,2004,1048-1054.
[7]L Parsa,H A Toliyat.Five-phase permanent-magnet motor drives[J].IEEE Transactions on Industry Applications,2005,41(1):30-37.
[8]L Parsa,H A Toliyat,A.Goodarzi.Five-phase interior permanent-magnet motors with low torque pulsation[J].IEEE Transactions on Industrial Applications,2007,43(1):40-46.
[9]L Parsa,A Goodarzi,H A Toliyat.Five-phase interior permanent magnet motor for hybrid electric vehicle application[C]//IEEE Conference on Vehicle Power and Propulsion,7-9 Sep.,Chicago,2005:631-637.
[10]L Parsa,H A Toliyat.Fault-tolerant interior permanentmagnet machines for hybrid electric vehicle applications[J].IEEE Transactions on Vehicular Technology,2007,56(4):1546-1552.
[11]N Bianchi,S Bolognani,M D Pre.Strategies for the faulttolerant current control of a fi ve-phase permanent-magnet motor[J].IEEE Transactions on Industry Applications,2007,43(4):960-970.
[12]N Bianchi,S Bolognani,M D Pre.Impact of stator winding of a fi ve-phase permanent-magnet motor on post fault operations[J].IEEE Transactions on Industrial Electronics,2008,55(5):1978-1987.
[13]Z Sun,J Wang,G W Jewell,et al.Enhanced optimal torque control of fault-tolerant PM machine under fl ux-weakening operation[J].IEEE Transactions on Industrial Electronics,2010,57(1):344-353.
[14]Z Sun,J Wang,D Howe,et al.Analytical prediction of the short-circuit current in fault-tolerant permanent-magnet machines[J].IEEE Transactions on Industrial Electronics,2008,55(12):4210-4217.
[15]郝振洋,胡育文.电力作动器用高可靠性永磁容错电机控制系统的设计及其试验分析[J].航空学报,2013,34(1):141-152.
HAO Zhenyang,HU Yuwen.Design and experimental analysis on the control system of high reliability fault tolerant permanent magnet motor used in electric actuator[J].Acta Aeronautica et Astronautica Sinica,2013,34(1):141-152.
(编辑:刘素菊)
Fault-tolerant control strategy of a fi ve-phase permanent magnet synchronous machine used for EV
ZHENG Ping,TANG Pei-lun,SUI Yi,WANG Peng-fei,WANG Zi-an
(School of Electrical Engineering and Automation,Harbin Institute of Technology,Harbin,150080,China)
The torque ripple is large when multiphase fault-tolerant permanent-magnet synchronous machine(PMSM)operates under fault conditions.An optimal current control strategy is proposed to reduce the torque ripple as multiphase machine works under fault conditions.Torque and torque ripple of multiphase machines under fault conditions were analyzed based on the phasor diagram of torque ripple.The optimal input currents for the remaining healthy phases were calculated to achieve a minimum torque ripple.The optimal current control strategy was veri fi ed by combined simulation,and the simulation results indicate that the torque ripple under fault conditions is reduced by more than 50%after adopting the proposed optimal current control strategy.
permanent-magnet synchronous machine;fault-tolerant;torque ripple minimization;optimal current control;phasor diagram
TM 382
A
1007–449X(2013)10–0065–05
2013–04–17
国家863重大项目(2011AA11A261);国家自然科学基金(51077026);中央高校基本科研业务费专项资金(HIT.BRET1.2010013)
郑 萍(1969—),女,博士,教授,博士生导师,研究方向为电机及驱动控制技术;
唐佩伦(1988—),男,硕士,研究方向为多相永磁同步容错电机;
隋 义(1987—),男,博士研究生,研究方向为多相永磁同步容错电机;
王鹏飞(1985—),男,博士研究生,研究方向为多相永磁同步容错电机;
王子安(1990—),男,硕士研究生,研究方向为多相永磁同步容错电机。
郑 萍
猜你喜欢
上海大中型电机(2021年2期)2021-07-21 03:01:32
建材发展导向(2021年7期)2021-07-16 07:07:28
防爆电机(2020年6期)2020-12-14 07:16:54
青年歌声(2019年2期)2019-02-21 01:17:36
知识经济·中国直销(2017年11期)2017-11-28 05:34:13
中国公路(2017年16期)2017-10-14 01:04:46
电子制作(2017年1期)2017-05-17 03:54:12
照明工程学报(2016年3期)2016-06-01 12:18:01
电测与仪表(2016年2期)2016-04-12 00:24:42
云南电力技术(2015年2期)2015-08-23 01:31:52