
基于机器视觉的晶圆裸片计数
2013-01-26 04:24广东工业大学信息工程学院
电子世界 2013年5期
广东工业大学信息工程学院 高 阳 雷 禹
我国是制造业大国,制造业的发展是我国现代化建设的主要推动力之一,提高生产效率对于制造业的发展起到关键作用。晶圆的良品率是半导体制造的一个重要指标。而现阶段统计合格晶片数量主要采用人工计数的方式来实现。对于统计合格晶片数量等繁琐而枯燥的工作,若采用人工方式完成,不仅效率很低,而且准确率不高,非常不利于半导体生产自动化的发展。
随着PC技术的不断发展和机器视觉技术在生产中的广泛应用,结合人工智能和模式识别技术来实现产品质量检测的自动化是目前自动化检测研究的主要方向。因此,在此背景下,晶圆裸片计数系统的研究对于提高生产效率很有意义。
在晶圆生产的各个环节,已经有不少论文发表,文献[1]只是发展了一部分数学上的理论,其中晶圆裸片的宽度和高度是已知量,对于未知裸片宽度和高度的图片是不适用的。文献[2]设计相应的芯片载物平台,系统过于复杂,不适合晶圆计数。文献[3]提出了一种模板匹配的方法来定位IC芯片,对于特征较少的晶片,效果较差,而且计数效率不高。
本文提出一种基于晶圆切片痕迹找线进行单元分割并分析单元特征来计算合格晶片数量的算法。这种方法简单有效,可靠性高,对光源和环境要求较低,而且能对一定程度畸变后的图像进行有效的处理。
1.算法概述
基于图像的晶圆计数算法流程如图1所示。系统采集到晶圆图像后,需要进行预处理,对给定晶圆进行定位。然后利用晶圆切片痕迹查找直线组,通过互相垂直的直线组确定晶圆单元尺寸并进行分割,最后分 析单 元特征确定合格单元的数量。
2.晶圆计数算法
2.1 晶圆定位
图像拍摄的过程中,虽然CCD相机是固定的,但工作台上晶圆在图像中的位置并不是保持固定不变的,需要对晶圆进行快速定位,便于后续的处理。
由于晶圆图像背景简单,可通过一个确定的阈值分割快速确定晶圆区域,找出晶圆轮廓以便后续定位。
晶圆的定位可通过圆检测实现。常用的圆检测的方法有最小二乘法,Hough变换以及一些改进方法[4-6]。本文采用最小二乘法。
Hough变换找圆算法[5]通过图像域“投票”
到参数域的穷尽式搜索模式,计算量较大,占用内存多。而最小二乘法通过最小化误差的平方和找到数据的最佳函数匹配,计算量小,可靠性高,运算速度快,比较适用晶圆定位。
圆曲线的公式为:

令a=-2A
可得圆曲线方程的另一种形式:

其中R是圆半径,(x,y)是样本点在图像中的坐标值,(A,B)是圆心坐标值。通过对轮廓点进行圆拟合,获取参数a,b,c的值,从而确定晶圆位置。

图1 算法流程框图Fig.1chart

图2 原图Fig.2 original map
图3 拟合效果 图Fig.3 Fitting rendering
图4 最值二值化Fig4 The most value binarization

图5 初步找线效果Fig5 Initial houghline effect
图6 verdis统计直方图Fig6 The distance of near lines hist
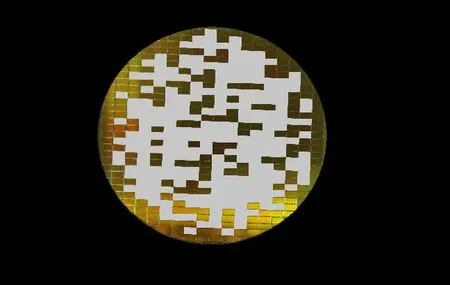
图7 分析画线效果Fig7 advanced effect
2.2 单元分割
为了正确统计出晶圆裸片的数目,需先确定各个裸片单元。因为实验图的分辨率较高,为2560*1920,所以边缘分割出来的二值图的直线边缘可能会很粗,将会给找线结果带来影响,所以这里我们需要对分割出来的灰度图进行局部最小值处理,用于细化边缘,便于提取晶圆裸片单元的布局信息。
然后,对晶圆裸片单元布局信息进行直线查找。本文采用Hough变换[6],Hough可对目标进行有效检测与识别、可并行实现、并具有对噪声不敏感等优点。传统Hough变换把空间中的点集合变为参数空间集合,通过在变换矩阵中找到峰值点,确定相关的直线。参数空间的直线标准表示法为:

其中,(xi,yi)表示图像中点的坐标,θ表示原点到直线的距离直线与纵轴的夹角,ρ.表示原点到直线的距离。
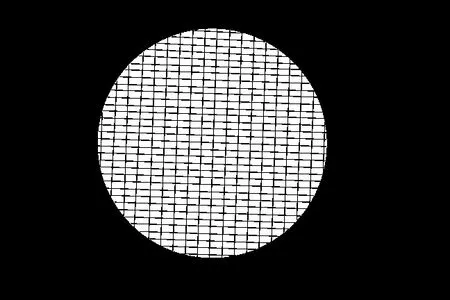
图8 完整晶圆裸片二值图Fig8 The binary map of the rest of the good wafer chip
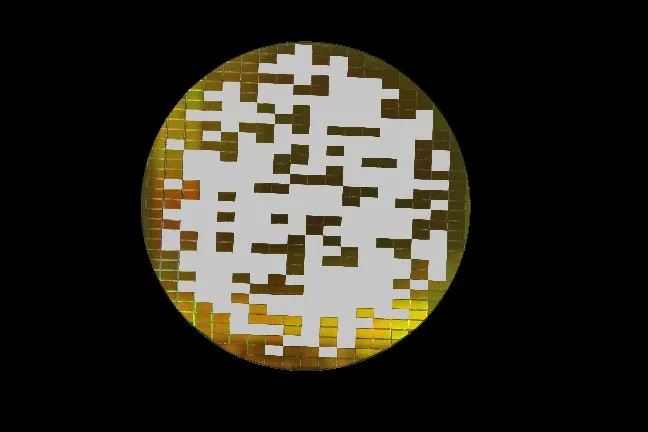
图9 合格的晶圆裸片标记图Fig12 The mark map of the good wafer chip
由于晶圆中直线的数量不确定,本文以最先找出的峰值参数θ为基准,根据晶圆直线仅有两方向且互相垂直,通过多次实验结果可以确定峰值参数θ相差不大于3°的峰值为合理峰值,并继续查找累加器峰值,如果连续找到三个参数θ偏差大于3°的峰值,则查找结束。其中峰值比较集中的两个角度bin的中值即为晶圆直线中心方向的直线。
合理角度范围确定之后,对于剔除了部分晶圆裸片的图像,在找线的过程中如果遇到两条或者两条以上直线的参数θ,ρ.相同,那么就认为它们是同一条直线其中的某一段直线,在划线的时候就把它们连接成为一条直线。
从图5中可以看出,由于噪声以及畸变等影响,直线可能存在误找和漏找的情况,如图7所示,图中最上面和最下面,最左边和最右边各有一条直线未能找出,这是由于这几条线上的点集合太少导致。
为了解决这个问题,我们需要进一步消除噪声引起的误找直线,本文通过对合理直线的分析来确定直线之间合理的间隔,进而实现辨别误找直线和补齐未找出直线的目的。
算法如下:
(1)根据直线的角度信息来把所有直线分为两组。
(2)分别求出两组直线中相邻两条直线的间距向量。
(3)把两组间距值分别分为30个bin。找到具有累加数最大值的bi n,如图6。然后取这个bin范围内的所有值的均值为最合适的间距,一组记为hordis,另一组记为verdis。在多幅类似的2560*1920分辨率图片上实验,误差范围是0.2%-2.3%
(4)分别以两组直线的最边上一条直线为基准向两边以该组间距为步长补齐缺失直线或者消除误找直线。在此,相邻两直线间距大于1.8倍最合适间距认为是缺失一条直线,小于0.8倍认为是误找直线。如果相邻两直线间 有多条缺失直线,那么即以新作直线为准再算两者间距,依次画线。超出圆内认为无效。
图7即为重新画线的结果。从图中可以看到边缘的直线被找出,而且误找的直线也可以被成功的消除。
2.3 确定晶圆数目
全部的直线被找到后,根据直线在圆上的坐标,晶圆可以被分割成很多连通域。图8为晶圆块的二值图像。
为了排除干扰,快速计算合格晶圆裸片总数,本文采用一种结合连通域的方法来实现目的。首先用连通域标记法标记图8。标记之后,我们会得到一个连通域总数N和一个标注矩阵L,然后度量标注矩阵区域的重心属性。通过判断标注矩阵区域的重心点是否为特定的色彩即可确定相应标注矩阵区域是否为无晶圆片的区域。这样就达到了快速计算合格晶圆裸片总数的目的。图9为图8通过连通域标记法结合连通域重心点来确定合格晶圆数的效果图。无晶圆片区即取走的合格晶圆片。
3.实验
为了验证本文提出的算法,在处理器T6600,2G内存的PC机上用MATLAB仿真。对200幅不 同拍摄角度和光照条件下剔除掉不合格晶圆裸片后的图像进行了分析,其中这些图片的分辨率均为2560x1920。最后统计结果显示本算法准确率达到了98.1%。平均每幅图所需运行时间为4.2s。因为晶圆图片的分辨率比较高,运算量比较大,较耗时,但达到了实际应用的要求。
4.结论
本文利用hough变换得到晶圆图像的直线信息,然后利用这些直线信息对最开始的直线进行校正和补齐。把所有直线都找到后就可以得到一个比较直观的晶圆裸片分布图。实验通过对数据的分析和先验知识不断地修正数据,使算法的可靠性得到提高。本算法有较强的鲁棒性,对光源和环境要求不高,而且能对一定程度畸变后的图像进行有效的处理。
[1]Dirk K.de Vries,“Investigation of Gross Die per Wafer Formulas”Semiconductor Manufacturing,IEEE Transactions on vol 18 pp.136-139 february 2005.
[2]廖广军,胡跃明,戚其丰,张浩.全自动上芯机的晶片检测系统[J].计算机工程与应用,2006,04:102-104.
[3]罗学刚,吕俊瑞.一种新的多圆快速检测方法[J].光电工程,2011,38(9).
[4]陈世哲,刘国栋,胡涛,庄志涛,浦昭邦.IC芯片视觉检测中快速图像匹配定位[J].光电子激光,2005,16(11):1347-1349.
[5]朱桂英,张瑞林.基于Hough变换的圆检测方法[J].计算机工程与设计,2008,29(6):1462-1464.
[6]冈萨雷斯.数字图像处理(MATLAB版)[M].电子工业出版社,2005:296-304.
[7]刘珂,周富强,张广军.半径约束最小二乘圆拟合方法及其误差分析[J].光电子·激光,2006,17(5).
[8]章毓晋.图像工程一下册图像理解与计算机视觉[M].北京:清华大学出版社,2000:30-44.
[9]边肇祺,张学工.模式识别[M].北京:清华大学出版社,2001.
[10]Eli Saber,e4 Murat Tekalp,Gazde BozdagiFusion of color and edge information for improved segmentation and edge linking.Image and Vision computing.
猜你喜欢
科学与信息化(2023年1期)2023-01-31
环球时报(2021-07-16)2021-07-16
海洋工程装备与技术(2020年6期)2020-03-09
中国交通信息化(2019年4期)2019-07-13
测控技术(2018年8期)2018-11-25
小学生导刊(低年级)(2016年5期)2016-05-27
通信电源技术(2016年5期)2016-03-22
电子世界(2016年22期)2016-03-12
电子工业专用设备(2015年4期)2015-05-26
印制电路信息(2014年11期)2014-03-11
