波形钢腹板PC组合连续箱梁桥施工监控*
2013-01-18 03:42向苇康郑尚敏
交通科技 2013年1期
向苇康 郑尚敏 万 水
(东南大学交通学院 南京 210096)
波形钢腹板PC组合箱梁桥是20世纪80年代出现在国外的一种新型桥梁,它采用自重较轻的波形钢板代替混凝土腹板,充分利用混凝土受压强度高、波形钢板抗剪屈服强度高的材料特性,实现了普通混凝土箱梁桥轻型化的目的[1]。
大跨度变截面波形钢腹板PC组合连续箱梁桥采用悬臂浇筑法施工时,施工过程中诸多因素(如混凝土弹性模量、腹板剪切刚度、桥梁施工临时荷载、挂篮变形等)的影响都会导致实际线形和受力状态与设计理想状态出现偏差,影响成桥后桥梁美观和行车舒适,也可能诱发施工事故[2-3]。因此,为确保安全建成线形平顺的高质量波形钢腹板PC组合连续箱梁桥,施工监控是必不可少的。
1 工程概况
南京长江第四大桥北接线滁河大桥,位于南京市六合区龙袍镇和东沟镇交界处,跨越滁河,起点桩号AK8+924.00,终点桩号 AK9+126.00,总长202.0m。上部结构为主跨96m的3跨预应力混凝土连续箱梁,跨径布置为53m+96m+53m。主梁采用单箱单室截面,单幅箱梁宽度为16.55m,箱梁底板宽度为8.00m。梁高和底板厚度均以1.6次由跨中向根部变化,跨中梁高3.00m,底板厚28cm,根部梁高6.50m,底板厚130cm。波形钢腹板波长1.60m,波高0.22m,采用厚度10,14,16,18mm 4种型号。96m主跨两端悬臂对称施工半跨96m/2划分为0~14号块,共15个施工段,即4m+4×2.4m+4×3.2 m+5×4m+1.6m=96m/2,0号块重量204.75 t,合龙段14b号块36.7t;53m边跨划分为0~16号块,共17个施工段,0号块重量204.75t,合龙段14a号块63.6t,边跨过渡墩上为15~16号块。图1为滁河大桥现场施工图。

图1 滁河大桥
2 施工过程仿真计算
滁河大桥施工控制仿真计算软件采用MIDAS/civil,主梁采用平面梁单元模拟。不考虑普通钢筋参与受力,考虑时间依存效果(累加模型),主梁的横隔板作用以节点荷载的形式体现。计算分析中忽略桥墩影响,抗震球形用一般支承进行模拟,梁顶节点与支座节点之间使用“弹性连接”中的“刚性”进行连接。模型共有91个节点、86个单元,如图2所示。对滁河大桥施工过程进行一次正装计算时,根据实际的施工过程将各标准梁段施工划分为移动挂篮、定位连接波形钢腹板和浇筑混凝土、张拉预应力钢筋3个工况,模拟计算得到阶段应力和位移控制数据。

图2 三维有限元模型
3 线形控制
3.1 立模标高的确定与控制
连续梁桥线形控制主要通过在主梁的立模标高中添加预拱度实现,以消除施工过程中各种作用(主梁自重、温度效应等)对线形的影响和后期运营过程中的收缩徐变、后期预应力的损失、活载变形等。滁河大桥主梁悬臂施工立模标高按式(1)确定。

式中:Hi为待施工节段箱梁底板前端立模标高;H0i为待浇筑箱梁底板前端设计标高;fsi为施工预拱度,是主梁施工梁段施工控制计算的累计挠度值(向上为正),即从该施工梁段开始施工到二期恒载施加完成后,各个工况对梁段前端测点标高的影响值之代数和;fg为挂篮变形产生的挠度值;fc为成桥预拱度,通常由设计师根据经验确定各跨跨中的成桥预拱度,剩余节段按照二次抛物线方式进行变化分配,本文背景工程滁河大桥主跨跨中的fc取6cm,边跨跨中的fc取3 cm;δ为根据实测的调整值。
标高控制就是当实际施工情况下的实测挠度与计算挠度不符合的时候,对比现实值与计算值,找出实际的变形规律,通过调整立模标高达到桥面标高控制的目的。立模标高调整过程中,不强行在下一梁段施工中立即全部调整,以保证梁的竖曲线和理论竖曲线近似,均匀连续,无局部的突起或下挠。
滁河大桥监控采用灰色理论控制方法调整位移误差。线形控制结果表明,左右两幅成桥后的线形与设计线形在各测点的误差均控制在规范规定和设计要求的范围之内[4]。
3.2 位移测试
位移测试的主要内容是标高测量。滁河大桥监控过程测量桥面标高的方法为几何水准测量法,水准控制点设在箱梁变形较小的0号块,测量仪器为精度0.1mm的DZ-02工程水准仪。为排除日照温差引起梁体的不规则变化和施工对观测工作的干扰,要求箱梁挠度观测严格安排在早晨时间段内(06:00~08:00)完成,要求记录开始和终了的环境温度,如观测时间超过1h,要求每小时记录一次环境温度。每一个梁段的施工过程均分为“挂篮前移”、“浇筑后”和“张拉后”3个阶段。表1和表2列出右幅14号墩13号块“浇筑后”和“张拉后”的位移测试成果,观察主梁悬臂状态下的挠度变化,对比实测值与计算值。
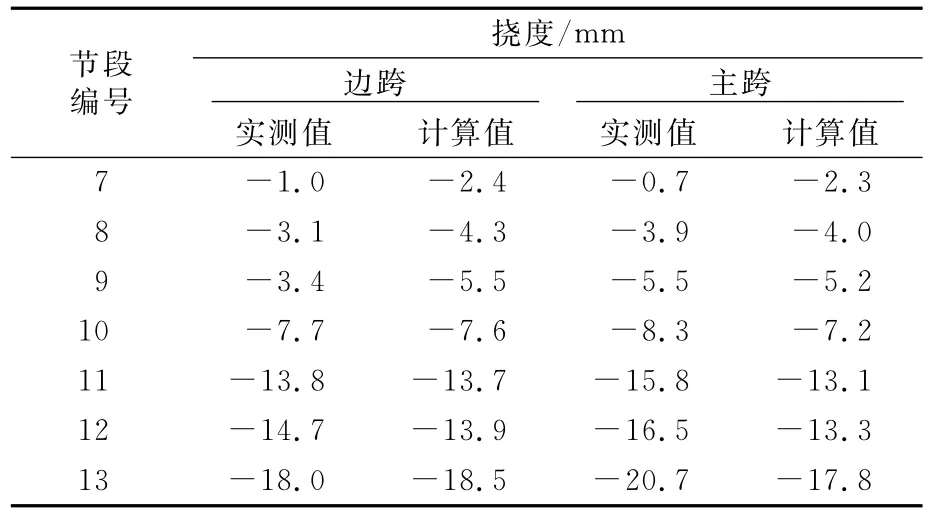
表1 右幅14号墩最大悬臂状态各节段挠度(浇筑后)

表2 右幅14号墩最大悬臂状态各节段挠度(张拉后)
由表1可见,在“浇筑后”阶段,箱梁各块段均产生向下的位移,数值随着悬臂端的伸长而逐渐增大,实测值与计算值变化规律一致,误差主要来源于混凝土弹性模量、截面几何尺寸、混凝土方量、挂篮自重、桥面临时荷载等。由表2可见,各块段混凝土张拉纵向预应力束后,产生向上的位移,数值随着悬臂端的伸长而逐渐增大,实测值与计算值变化规律一致。误差主要由混凝土弹性模量、预应力误差等造成。
4 应力监测
应力控制是指通过定期监测与分析,及时发现施工中可能存在的异常情况,一旦发现全桥应力接近或超出安全指标,及时预警,保障施工安全。滁河桥测量断面选择在主跨箱梁根部、主跨1/4、主跨跨中、主跨3/4;边跨箱梁根部、边跨1/4、边跨1/2、边跨合龙段等部位。测试仪器选择可同时测量温度的振弦式应力传感器和配套的综合读数仪。
下面以滁河桥右幅为例,给出14号墩主跨根部截面的全施工阶段实测应力与理论应力对比分析结果(见图3~图5)。混凝土实测值取顶底板左、中、右3个测点所采集的应力值的平均数。
从各施工阶段实测值与计算值的对比情况看,该断面顶板、底板混凝土的正应力值与计算值的整体变化趋势一致,随着悬臂的伸长,箱梁应力数值逐渐增大。最大压应力为18.76MPa,最大拉应力为0.20MPa,小于《公路钢筋混凝土及预应力混凝土桥涵设计规范》(JTGD62-2004)规定的短暂状况下混凝土压应力限值和拉应力限值。
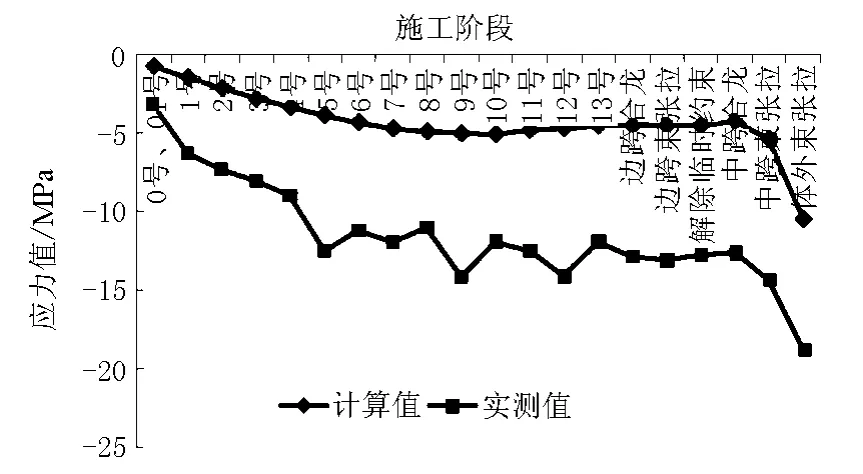
图3 右幅14号墩主跨箱梁根部截面顶板应力
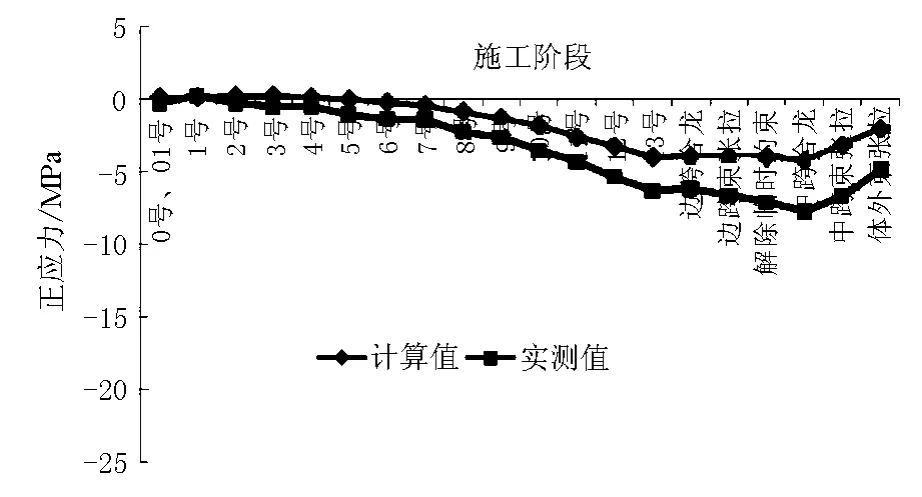
图4 右幅14号墩主跨箱梁根部截面底板应力

图5 右幅14号墩主跨箱梁根部截面某侧钢腹板剪应力
由于实测结构是空间结构,数值误差来源于施工过程中机具堆放、环境误差以及钢弦应变计测量精度等多种因素,因此只要测点稳定,变化趋势一致,施工中应力不超过规范规定的限值,就可以说明结构是安全的。
剪应力方面,钢腹板理论上在悬臂状态下应随着节段的增多而逐步增大,实测数据与设计控制值吻合良好。钢板应力保持在20MPa左右,远低于Q345钢的容许剪应力(120MPa),满足设计要求。
5 钢腹板空间位置控制
鉴于波形钢腹板的柔性,需在施工过程中对其进行空间定位,避免因波形钢腹板横向偏位严重而造成两侧悬臂端不能进行正常合龙。由于波形钢腹板是一块空间的板,所以其空间位置控制方法采用3个点的空间坐标进行定位,图6给出了每块钢腹板空间3个点的位置图 。测量仪器使用精度1″的徕卡TPC1201全站仪。

图6 波形钢腹板的空间定位点
表3给出了右幅14号墩边跨侧5号梁段两边钢腹板6个定位点y向的坐标及与标准值的误差,代表的是波形钢腹板横向偏位差,最大值为5 mm。施工中应尽可能将各块段钢腹板误差控制在5mm之内,以确保合龙段的顺利完成。

表3 右幅14号墩边跨侧5号块钢腹板定位表
6 结语
本文从施工过程仿真计算、线形控制、应力控制、钢腹板空间位置控制等方面对南京长江第四大桥北接线滁河大桥的施工监控过程进行了阐述。实践表明,对结构施工全过程的受力和位移状态的有效控制,为施工各阶段和环节的操作提供了科学依据,保证了工程施工安全和营运安全。滁河大桥合龙后线形流畅、预拱度设置合理、几何尺寸及结构安全,符合设计要求。
[1] 徐 强,万 水.波形钢腹板PC组合箱梁桥设计与应力[M].北京:人民交通出版社,2009.
[2] 陈健兵,万 水,喻文兵,等.波形钢腹板PC组合箱梁弯曲性能理论分析与试验研究[J].武汉理工大学学报:交通科学与工程版,2004,28(1):15-18.
[3] 葛耀君.分段施工桥梁分析与控制[M].北京:人民交通出版社,2003.
[4] JTG TF50-2011公路桥涵施工技术规范[S].北京:人民交通出版社,2011.
猜你喜欢
西部交通科技(2022年8期)2022-11-19
中国公路(2022年10期)2022-08-03
北京支部生活(2020年4期)2020-04-24
山西交通科技(2017年4期)2017-10-29
山西交通科技(2015年4期)2015-01-12
城市道桥与防洪(2014年5期)2014-02-27
城市道桥与防洪(2014年1期)2014-02-27
科学之友(2013年1期)2013-08-23
交通建设与管理(2013年6期)2013-04-21
城市道桥与防洪(2013年9期)2013-03-11