
一种简化PID模糊控制器的研究与设计
2013-01-18 12:04雷春雨
电子设计工程 2013年2期
雷春雨,王 直
(江苏科技大学 江苏 镇江 212003)
美国加州大学控制论专家L.A.Zadeh教授于1965年创立了模糊集理论,为描述研究和处理模糊性现象提供了有力的数学工具。继Zadeh 1973年提出模糊控制思想后,1974年英国的 E.H.Mamdani教授在实验室将模糊逻辑在锅炉和蒸汽机的控制上得到成功应用,标志着模糊控制的诞生[1]。此后的40多年里,模糊控制技术得到了飞速的发展,得到众多学者的关注和重视。
模糊控制器虽然与常规PID控制器在控制机理方面有许多相似之处,但是模糊PID是智能PID,具有自适应性。而常规PID控制器属于线性控制的范畴。目前人们常采用的模糊控制器大多是二维的,常见的两种二维模糊控制器为PD型和PI型。相比而言,PD型模糊控制器的优点是动态控制品质较好,缺点是在稳态时,系统输出偏差较大;PI型虽然稳态偏差优于PD型,但就整个动态过程并不及PD型。为了稳态和动态能同时保持良好的品质性能,人们研究出了三维的PID型模糊器[2]。所谓三维就是将模糊控制的控制规则有3个输入变量,这样的处理虽可以使模糊控制系统的性能提高,但是由于规则的输入变量增加了,模糊控制规则数也相应增加,这就给建立和完善三维模糊控制规则库带来了很大的困难。文中就将推导一种简化PID型模糊控制器,它不仅具有三维PID型模糊控制器的性能,而且只需采用两个输入变量和一个模糊规则库,这样将大大减少模糊控制规则数。
1 模糊控制器的基本原理和结构分类
模糊控制器主体部分是由计算机或单片机构成,多采用二维模糊控制结构,实现一步模糊控制算法的过程描述如下:计算机采集被测参数的精确值,然后将此值与给定值作比较,得出误差e以及误差变化率ec作为模糊控制器的输入语言变量,将e和ec经模糊化处理得到E和EC,并用相应的模糊语言表示,由此便得到了相应的模糊子集。再由E模糊子集和模糊控制规则,根据推理的合成规则进行模糊决策,得到模糊控制量U,解模糊化化得到精确控制量u[3]。
在众多种类的模糊控制器中,二维模糊控制器由于其输入变量合理、规则库易于建立而得到广泛的应用。这里仅介绍2种常用的二维模糊控制器:一种是PD型模糊控制器,如图1所示;另一种是PI型模糊控制器,如图2所示。
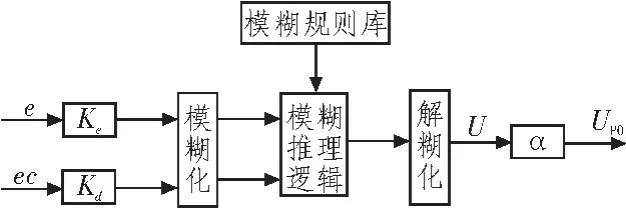
图1 PD型模糊控制器Fig.1 PD fuzzy controller
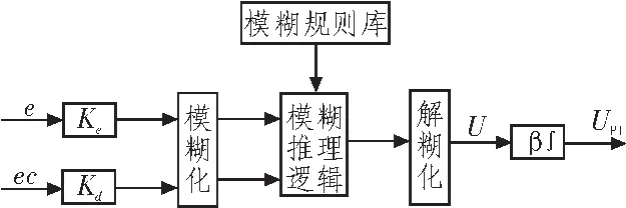
图2 PI型模糊控制器Fig.2 PIfuzzy controller
它们两者的差别主要表现在输出量和规则库的建立。PD型模糊控制器直接为输出控制量,而PI型模糊控制器的输出一般是控制量的增量形式[4]。由于输出量不同,所以它们具体规则库的形式也不同。
为了减少PID型模糊控制器控制规则的数量,同时又克服PD型和PI型模糊控制器的缺点,首先想到是将上述2个模糊控制器并联在一起,构成一个二维输入的PID型模糊控制器,如图3所示。
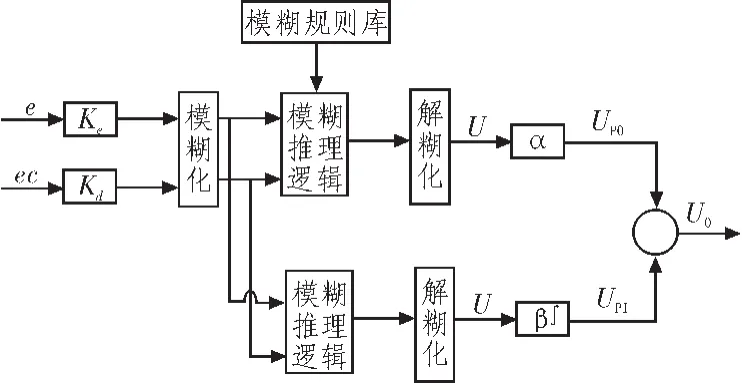
图3 并联PID型模糊控制器Fig.3 Parallel PID fuzzy controller
较之传统的三维PID型模糊控制器,这种方案只要需2个二维输入的控制规则库,就可实现PID型模糊控制器。虽然控制规则数有所减少,但仍需要建立2个,这在实际应用中还是相对比较麻烦。本文接下来将研究推导出一种简化二维PID型模糊控制器。
2 简化PID型模糊控制器
为了进一步降低规则库建立的复杂程度,可以考虑在PD型模糊控制器后面并联一个积分环节,同时引入2个权重系数α和β,如图4所示。从理论上证明,此简化的模糊控制器可等效为一个时变非线性PID型模糊控制器,与传统的PID型模糊控制器相比,它只需2个输入变量和一个规则库[5]。下面是该模糊控制器的推导过程。
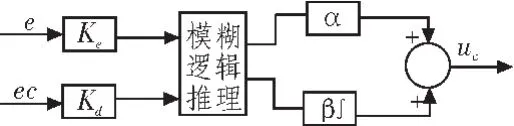
图4 简化PID型模糊控制器Fig.4 Simplified PID fuzzy controller
该模糊控制器的两个输入分别为 e(误差),ec(误差变化率),输出为 u(控制量)。 e,ec,u 的离散论域分别为 E⊂R,EC⊂R,U⊂R。 e 和 ec 的模糊集合分别 Ai(i∈I=[-m,...,-3,-2,-1,0,1,2,3,...m])和 Bj(j∈J=[-n,...,-3,-2,-1,0,1,2,3,...,n])。
已知PD型模糊控制器的输出为:
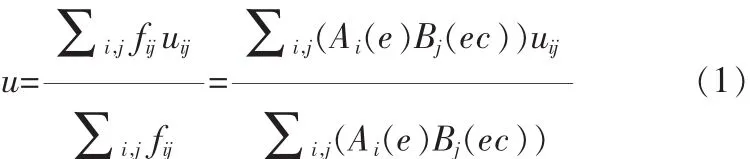
现在假设某 t时刻,输入 e在区间[ei,ei+1]内,ec在区间[ecj,ecj+1]内,此时,e,ec 的率属度分别为


由于在任一时刻,输入e和ec的率属函数最多只在两相邻的模糊子集上不为0,即:

所以,式(1)可化简为
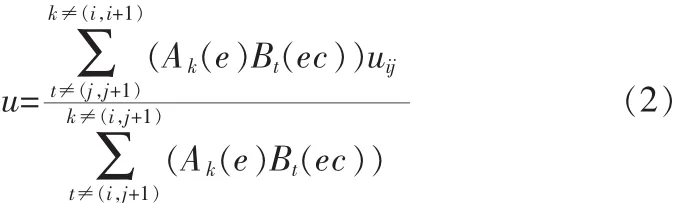
当 e∈[ei,ei+1]时有 Ai(e)+Ai+1(e)=1
当 ec∈[ecj,ecj+1]时有 Bj(ec)+Bj+1(ec)=1
由此,式(2)可进一步化简为
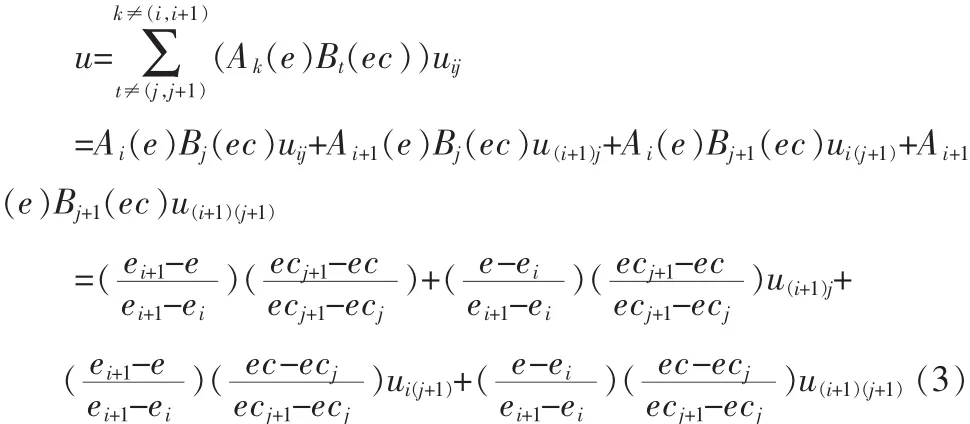
由式(3)可知,控制器的输出u是输入e和ec的非线性函数:

同时又定义:

若 δe,δec,δu 足够小,且(ei+δe,e+δec)∈[ei,ei+1]×[ecj,ecj+1],则式(4)可用下式来表示:

由式(3)整理得:

最后得简化PID模糊控制器的输出为:
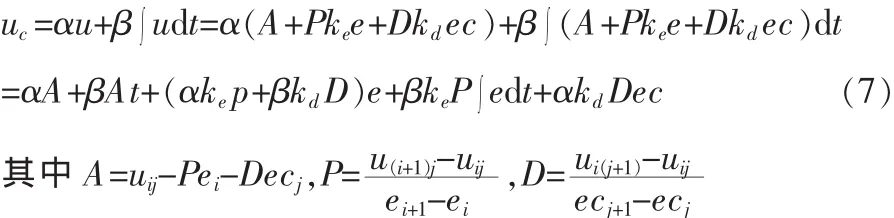
此PID型模糊控制器可通过调整2个权重系数α、β来进行PI型和PD型模糊控制器之间的切换:
当α>0,β=0时,为 PD型模糊控制器;
当α=0,β>0时,为 PI型模糊控制器;
当α>0,β>0时,为 PID型模糊控制器。
3 仿真结果
为了验证上述简化PID型模糊控制器的性能,将其与PD及PI型模糊控制器进行仿真比较。
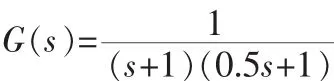
从传统的控制理论中我们知道,控制对象大多为0型系统。因此,考虑用一个二阶线性系统来验证简化 PID型模糊控制器的性能[6]。二阶对象的传递函数为:
输入e、ec和控制输出 u的隶属度函数如图5所示。PI型模糊控制器控制规则如表 1所示,PD型模糊控制器的控制规则如表 2所示。简化PID型模糊控制器的规则与PI型相似。模糊控制器采用MATLAB的模糊控制工具箱设计,并在 Simulink[7]中调用。
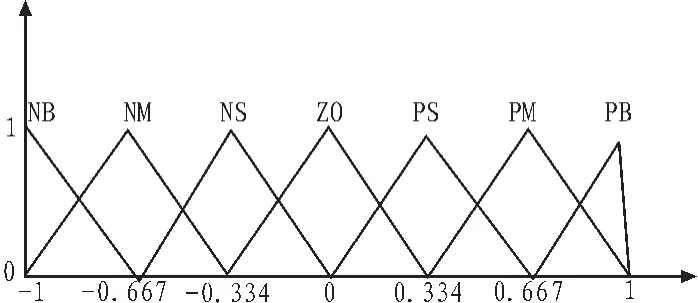
图5 e,ec和 u的隶属度函数Fig.5 Membership functions of e,ec and u
其中 {NB,NM,NS,Z0,PS,PM,PB}表示 {负大,负中,负小,零,正小,正中,正大}。
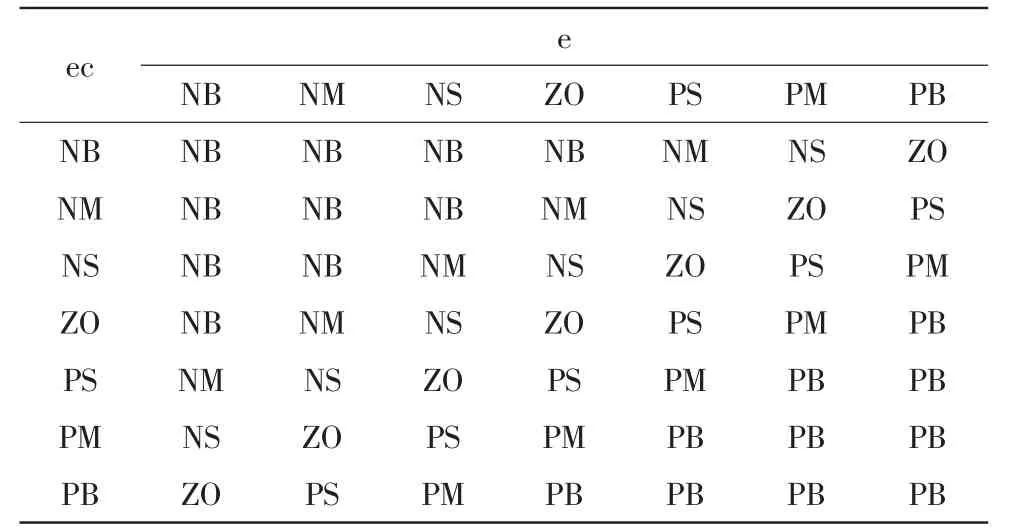
表1 PI/PID型模糊控制规则表Tab.1 Table of PI/PID fuzzy control rules
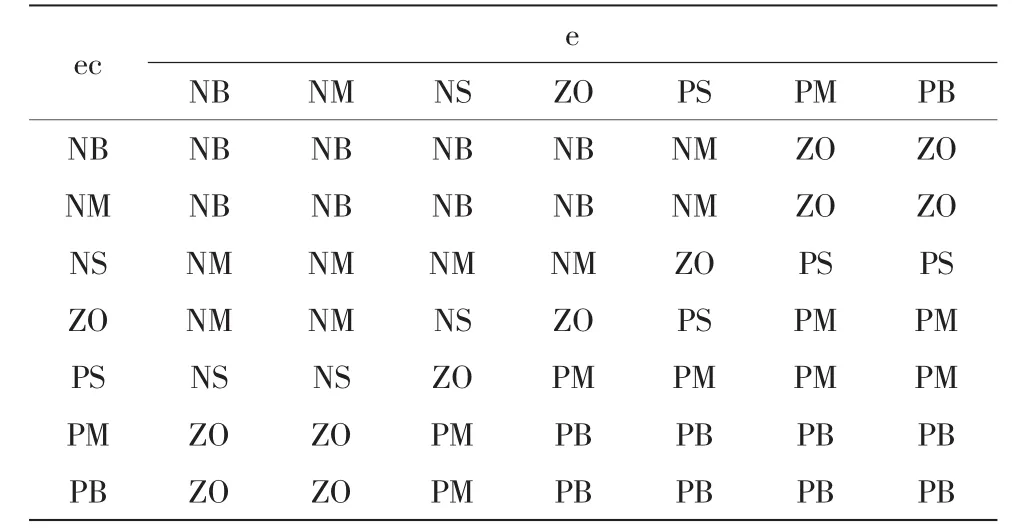
表2 PD型模糊控制规则表Tab.2 Table of PD fuzzy control rule
图6、图7、图8分别是PI型模糊控制器、PD型模糊控制器[8]、简化PID型模糊控制器的阶跃响应曲线。从图中可以看出,动态过程中,PI型模糊控制系统的响应超调大,而且过渡时间比较长,而简化PID型模糊控制系统不仅响应超调小,而且过渡时间也短。所以,PID型模糊控制系统的动态性能优于PI型模糊控制系统。在稳态过程中,PD型模糊控制系统引起的误差较大,而PID模糊控制系统可以消除稳态误差,这表明简化PID型模糊控制系统的稳态性能优于PD型模糊控制系统。
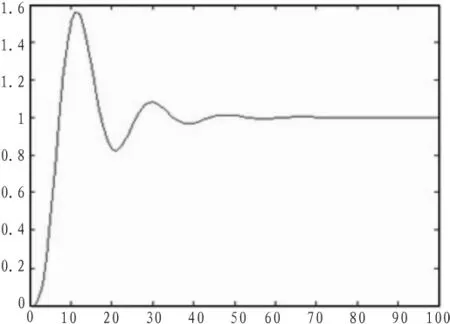
图6 PI型模糊控制系统的阶跃响应曲线Fig.6 Step response curve of PIfuzzy control system
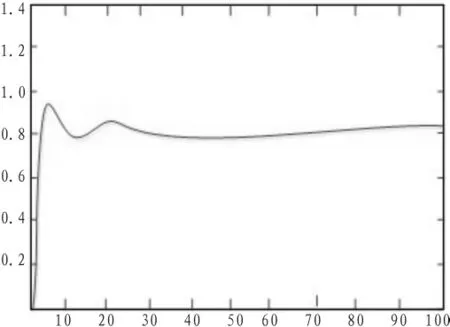
图7 PD型模糊控制系统的阶跃响应曲线Fig.7 Step response curve of PD fuzzy control system
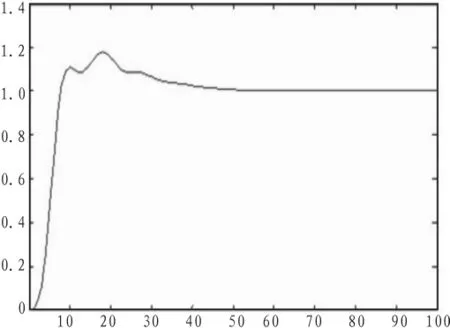
图8 PID型模糊控制系统的模糊曲线Fig.8 Step response curve of PID fuzzy control system
4 结 论
由上述仿真曲线可以表明,在各项控制器参数相同的情况下,简化PID型模糊控制系统的动态性能优于PI型模糊控制系统,稳态性方面优于PD型控制系统。而且相比较常规PID模糊控制器,它是二维输入,且只需建立一个控制规则数,大大的减小了工作的复杂度。
[1]刘定邦.大型风力发电机组的模糊控制研究[D].重庆:重庆大学,2007.
[2]程 静.智能控制在风力发电机控制系统中应用的研究[D].乌鲁木齐:新疆大学,2004.
[3]包献文,王维庆.模糊控制在风力发电系统功率控制中的应用[J].能源与环境,2009(5):19-20,22.BAO Xian-wen,WANG Wei-qing.The application of fuzzy control in wind power generation system control[J].Energy and Environment,2009(5):19-20,22.
[4]胡一倩.二维PID型模糊控制器在电厂过热汽温控制中的应用研究[D].南京:东南大学,2002.
[5]薛艳.电脑鼠模糊PID控制算法研究[D].西安:长安大学,2010.
[6]王正斐.电力系统故障限流器的研究[D].哈尔滨,哈尔滨工程大学,2008.
[7]王亮,王文策,程斌,等.基于Simulink的发电机励磁系统整流单元的建模与仿真[J].陕西电力,2011(7):25-28.WANG Liang,WANG Wen-ce,CHENG Bin,et al.Modeling&simulation of generator excitation systemrectifier unit based on Simulink[J].Shaanxi Electric Power,2011(7):25-28.
[8]王江荣,刘伟.基于Haar小波的一类模糊控制器的优化及应用[J].工业仪表与自动化装置,2011(5):30-32.WANGJiang-rong,LIUWei.Haar wavelet-based fuzzycontroller for a class of optimization and application[J].Industrial Instrumentation&Automation,2011(5):30-32.
猜你喜欢
大电机技术(2022年3期)2022-08-06
煤气与热力(2021年12期)2022-01-19
核科学与工程(2021年4期)2022-01-12
煤气与热力(2021年4期)2021-06-09
中华戏曲(2020年1期)2020-02-12
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
西北工业大学学报(2015年1期)2016-01-19
筑路机械与施工机械化(2014年4期)2014-03-01
