
机场道面复杂背景下异物特征分析与检测
2013-01-18 12:03曹晓光薛斌党李红伟
电子设计工程 2013年2期
刘 迪,曹晓光,薛斌党,李红伟
(1.北京航空航天大学 图像处理中心,北京 100191;2.中国民航管理干部学院 航空安保系,北京 100102)
机场道面异物(Foreign Object Debris,FOD[1])检测对于跑道运行安全具有现实意义。道面异物可能以3种形式影响航空安全:在气流的作用下打击高速运动的飞机,造成蒙皮损伤;或者被吸进发动机,造成发动机损伤;划伤或者刺伤高速运动的飞机轮胎,严重时造成爆胎,进而可能导致机毁人亡的事故。目前,国内机场大多采用在飞机起落间隙利用巡道车进行人工目视检测的方法,该方法效率低、主观性强。机场道面异物的自动检测能够辅助场务人员进行机场道面的人工检查,提升检查的速度和精度。
目前,国际上有4个成熟的异物检测系统,分别为英国的Tarsier(眼镜猴)系统、以色列的FODetect系统、新加坡的iFerrer系统、美国的FOD Finder系统。其中只有iFerrer系统采用的是固定式的高分辨率摄像机来进行异物检测,其他主要采用了毫米波雷达技术来进行异物检测[2]。
本研究应用于机场道面异物检测系统,该系统为移动式车载系统,通过实时道面图像信息的采集,得到道面图像,采用图像处理的方法,根据异物的图像特征来进行异物检测。
1 问题分析
与普通路面相比,水泥混凝土机场道面有其自身的独特性,背景中存在规则平行的拉毛纹理和各种干扰,比如灯盖(图 1(a))、轮胎印(图 1(c))、标志标线(图 1(b))、接缝和阴影(图1(d))等,其中阴影是巡道车采集图像时产生的,其余均为机场道面的正常干扰。这些都为机场道面异物检测增加了很大难度。
机场道面常见异物有螺钉(图 2(a))、碎石子(图 2(b))、金属条、生活垃圾、鸟类尸体等,根据民航局对异物危险等级的评估,螺钉、金属条等金属质地的异物威胁等级最高;其次为碎石子、鸟类尸体等。
本文选取了对机场飞行安全威胁较高的几种异物,分别为螺钉、金属条、碎石子。在机场道面复杂背景下,选取有效特征对异物进行检测。
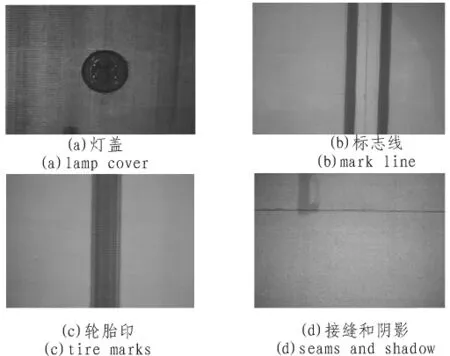
图1 机场道面复杂背景图Fig.1 Complex background of airport pavement
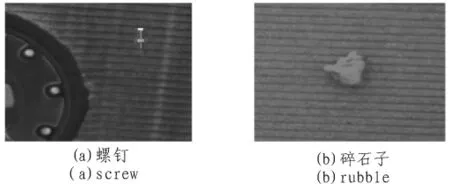
图2 机场道面异物图Fig.2 FODs of airport pavement
通过前期实验,由于采集到的图像尺寸为103×138 cm,而异物的尺寸一般处于厘米量级,如果从整幅图像来分析特征,那么有异物的图像和正常图像之间差别很小,很难进行区分。有鉴于此,对实验图像进行分块,分块大小为4.3×4.3 cm,此尺寸对于长度为1厘米异物能够进行有效检测。
2 特征分析
2.1 角点特征
角点是图像很重要的特征,对图像图形的理解和分析有很重要的作用。角点没有明确的数学定义,但人们普遍认为角点是二维图像亮度变化剧烈的点或图像边缘曲线上曲率极大值的点。这些点在保留图像重要特征的同时,可以有效地减少信息的数据量。一般情况下,角点检测广泛应用于三维场景重建、运动估计、目标跟踪、目标识别、图像配准与匹配等计算机视觉领域。
本研究中的机场道面广泛存在拉毛平行纹理,标志线、轮胎印也均为平行纹理,所以单纯就机场道面复杂的背景来说,角点存在的数量很少,而就本研究选定的异物而言,螺钉为规则的有棱角的异物,而金属条和碎石子为不规则的尺寸较小的异物,它们均具有较多角点特征。因此选定角点数目作为分类器的一个输入特征值。
Harris角点[3]是一种成熟的角点检测方法,本研究选择Harris角点作为角点检测方法。
由图3可见,有螺钉的图像的Harris角点检测数目远远多于无螺钉的图像,由此可见,Harris角点特征对于异物的检测是有效的。
2.2 灰度共生矩阵

图3 Harris角点检测结果Fig.3 Test results of Harris corner
灰度共生矩阵[4]是描述图像纹理特征的一种常用方法。由于纹理是由灰度分布在空间位置上反复出现而形成的,因而在图像空间中相隔某距离的两象素之间会存在一定的灰度关系,即图像中灰度的空间相关特性。灰度共生矩阵就是一种通过研究灰度的空间相关特性来描述纹理的常用方法。
取图像(N×N)中任意一点(x,y)及偏离它的另一点(x+a,y+b),设该点对的灰度值为(g1,g2)。 令点(x,y)在整个画面上移动,则会得到各种(g1,g2)值,设灰度值的级数为 k,则(g1,g2)的组合共有k的平方种。对于整个画面,统计出每一种(g1,g2)值出现的次数,然后排列成一个方阵,再用(g1,g2)出现的总次数将它们归一化为出现的概率p(g1,g2),这样的方阵称为灰度共生矩阵。距离差分值(a,b)取不同的数值组合,可以得到不同情况下的联合概率矩阵。(a,b)取值要根据纹理周期分布的特性来选择,对于较细的纹理,选取(1,0)、(1,1)、(2,0)等小的差分值。
当a=1,b=0时,像素对是水平的,即0度扫描;当a=0,b=1时,像素对是垂直的,即90度扫描;当 a=1,b=1时,像素对是右对角线的,即45度扫描;当a=-1,b=-1时,像素对是左对角线,即135度扫描。
这样,2个象素灰度级同时发生的概率,就将(x,y)的空间坐标转化为“灰度对”(g1,g2)的描述,形成了灰度共生矩阵。
基于灰度共生矩阵形成的纹理特征有能量、惯性矩、熵、相关性等。
惯性矩:

相关性:

其中:
根据惯性矩和相关性特征的定义[5]和前期实验结果(如图4(b)、(c))可以得出:
有异物的图像一般情况下,明暗变化比较明显,惯性矩的值会偏高。相关性体现了图像纹理的一致性,有异物的情况下,图像的一致性不好,相关性的特征值较低。
因此,本研究选取惯性矩和相关性作为描述图像的特征。
2.3 灰度级分布范围
灰度级分布范围[6]体现了图像的灰度直方图特征,有异物的图像目标和背景的差异较大,灰度级的分布范围较广,而单纯背景的正常图像灰度级分布范围较窄,以此为特征来进行检测,得到了较好效果。
3 实验结果
3.1 特征验证实验
本实验训练样本集为分块后的4.3×4.3 cm异物图像205张和正常图像682张。其中,异物图像包括螺钉162张、金属条24张、碎石子19张,正常图像包括各种正常机场道面情况,有地灯、标志线、轮胎印、单纯拉毛、轮胎印与标志线混合等复杂背景。
对训练样本分别提取Harris角点、惯性矩、相关性和灰度级分布范围特征,得到训练样本的特征曲线图,分别见图4(a)、(b)、(c)、(d)。
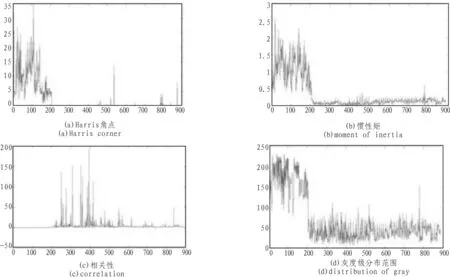
图4 特征曲线Fig.4 Characteristic curves
由特征曲线图可以看出,这些特征对于区分异物图像与正常图像是有效的。
3.2 阈值法检测实验
本实验选定的测试图像为103×138厘米的整张图像共160张,均为挑选后具有代表性的图像。其中异物图像80张,正常图像80张。
进行测试时,首先将图像进行切块,整张图像切成768张小图,逐张小图进行检测,若有一张小图被检测为异常,则判定整张图像为异物图像。
由特征曲线图可明显看出异物图像和正常图像之间的区分性,通过训练样本集的特征,选定角点、惯性矩、相关性和灰度级分布范围特征阈值分别为2、0.6066、2.2358、105。得到的测试结果如表1所示。
笔者定义,正常图像被检测为异物图像的比率称为误检率,异物图像被检测为正常图像称为漏检率。可以看出,阈值法测试结果较好,误检率为1.2%,漏检率为2.5%,总体正确率达到了98.1%。正常图像被误检为异物图像的只有1张,其原因为,在整幅图像均充满轮胎印背景时,出现一处白色不明污点,使得局部对比度增大,故误判为异物。异物图像有两张存在漏检,原因为,在分块时,异物被切割到边缘,使得其特征不明显,故造成漏检,拟采用的解决方法为,采取重叠分块的方式,使得异物以很大概率落在分块后小图的中央,进而减少漏检情况发生。

表1 阈值法测试结果Tab.1 Test results of threshold method
3.3 SVM法检测实验
SVM法[7]是建立在统计学习理论的VC维理论和结构风险最小原理基础上的,根据有限的样本信息在模型的复杂性(即对特定训练样本的学习精度)和学习能力(即无错误地识别任意样本的能力)之间寻求最佳折衷,以期获得最好的推广能力。
SVM法得到的结果如表2所示。
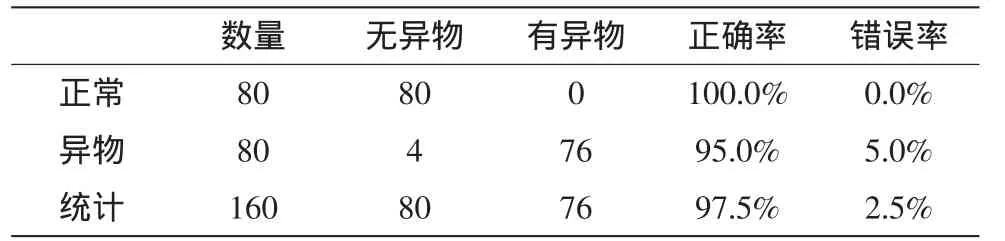
表2 SVM法测试结果Tab.2 Test results of SVM
可以看出,与阈值法相比,SVM法的误检率较低,为0.0%,但漏检率达到了5.0%,偏高。
2种方法综合起来看,检测结果具有一致性,检测正确率均达到了98%左右,说明特征选取有效,可以准确的在机场道面复杂背景下检测出异物。
4 结 论
本研究在解决机场道面异物自动检测问题上,给出了初步成果。首先,找出了机场道面常见异物相对于复杂背景的有效特征,用于实际检测问题。其次,根据分块原理,在正确检测的基础上,可以实现异物的初步定位。最后,此研究成果可用于实际机场道面异物自动检测系统的搭建,使机场道面异物自动检测系统的实现成为可能。
[1]樊曼劼.机场跑道异物(FOD)检测研究[D].北京:北京交通大学,2011.
[2]李煜,肖刚.机场跑道异物检测系统设计与研究[J].激光与红外,2011,41(8):909-915.LI Yu,XIAO Gang.Study and design on FOD detection and surveillance system for airport runway[J].Laser&Infrared,2011,41(8):909-915.
[3]ZHAO Wan-jin,GONG Sheng-rong,LIU Chun-ping,et al.Adaptive harris corner detection algorithm[J].Computer Engineering,2008,34(10):212-214.
[4]Haralick R M,Shanmugam K,Dinstein I H.Textural features for image classification[J].Systems, Man and Cybernetics,IEEE Transactions on,1973,3(6):610-621.
[5]高程程,惠晓威.基于灰度共生矩阵的纹理特征提取[J].计算机系统应用,2010,19(6):195-198.GAO Cheng-cheng,HUI Xiao-wei.GLCM-Based texture feature extraction[J].Computer Systems&Applications,2010,19(6):195-198.
[6]谢凤英,赵丹培.Visual C++数字图像处理[M].北京:电子工业出版社,2008.
[7]Chen P H,Fan R E,Lin C J.A study on SMO-type decomposition methods for support vector machines[J].Neural Networks, IEEE Transactions on,2006,17(4):893-908.
猜你喜欢
交通科技与管理(2022年16期)2022-08-27
科技创新与应用(2022年14期)2022-06-02
建筑(2020年19期)2020-10-29
深圳职业技术学院学报(2020年3期)2020-06-19
电子技术与软件工程(2018年10期)2018-07-16
软件导刊(2018年4期)2018-05-15
北京航空航天大学学报(2017年12期)2017-04-23
电子科技(2016年12期)2016-12-26
系统工程与电子技术(2016年4期)2016-08-24
物联网技术(2015年1期)2015-01-26
