某型飞机火控测量设备攻击误差分析
2013-01-10 03:48田春艳蓝志环纪义国
通化师范学院学报 2013年12期
田春艳,蓝志环,纪义国
(空军航空大学 作战指挥系,吉林 长春 130022)
机载火控测量设备是一种用于接收来自目标自身辐射或反射的光辐射,通过变换、处理、控制等环节,获得所需要的信息,并进行必要处理的光电装置.它的基本功能就是将接收到的光辐射转换为电信号,并利用它去达到某种实际应用的目的.由于电子对抗的发展,雷达信号往往受到强有力的干扰,而影响到整个火控设备的有效性,因此愈来愈多的火控设备装置有机载光电跟踪测量设备,作为雷达的补充,同时还可以提高对目标指示的精度.
1 测量坐标系到攻击坐标系的变换
1.1 应用坐标系
定义一:中心地平坐标系(OC1C2C3),C1指向正北,C3指向天顶,C2与C1和C3形成右手坐标系.
定义二:地心质心坐标系(OG1G2G3),原点在地球质心,G1轴为地球自转轴并指平北极,G3轴位于与地平坐标系原点相同经度的赤道平面内,G2与G1和G3形成右手坐标系.
定义三:惯性坐标系(OXYZ),用来确定攻击机的姿态.在航空射击火力控制设备中,通常选取其坐标原点就在攻击机的质心上、相对地心质心坐标系作平移运动的相对惯性坐标系作为OXYZ.其Y轴与重力方向相反,X、Z轴在垂直于Y轴的平面上,组成右手螺旋系.
定义四:飞机坐标系(OXFYFZF),又称飞机机体坐标系.坐标原点取在载机质心上,XF轴沿飞机纵轴方向,指向飞机飞行方向为正,飞机升力轴为YF轴,指向座舱盖上方为正,用右手定则可确定ZF轴.
定义五:光电跟踪测量设备基座坐标系(简称基座坐标系)(OB1B2B3),光电跟踪测量设备基座坐标系与载机间用减振器相联结,当光电跟踪测量设备基座与载机间无安装误差时,基座坐标系与飞机坐标系完全重合.
定义六:目标坐标系(OK1K2K3),目标坐标系的定义为:K1轴与光电跟踪测量仪的光轴重合,K2、K3正交指向天顶,目标位置定义在坐标原点上.
1.2 测量方程
光电跟踪测量设备基座坐标系和目标坐标系.采用从中心地平坐标系到目标坐标系变换:机载光电跟踪测量归根结底是机载被动目标参数测量.机载被动目标参数测量是通过目标的方位角和起始角来估计目标的运动参数,而目标的方位角和起始角是在目标坐标系下测量到的,载机的其他信息是在本机所在的惯性坐标系下给出的,因此,机载光电跟踪测量设备必须将主动件的原始误差先投影到与其相关的中间构件上,然后再从该中间构件投影到下一个与其有关的中间构件上,最终投影到机构的从动件上,求出机构位置误差.
因此,要进行火控测量设备误差分析就必须先建立各坐标系间的变换关系,共得出了13个变换矩阵M1~M13.
M1~M3为从中心地平坐标系到地心质心坐标系的转换矩阵.

M4~M6为从地心质心坐标系到惯性坐标系的转换矩阵.其中:绕G2轴旋转λs;沿G3轴平移hS;绕G3轴旋转ψSC(航向角).
M7~M9为从惯性坐标系到飞机坐标系的转换矩阵.其中,飞机坐标系绕惯性坐标系的Y轴转过航向角υ,飞机坐标系绕其ZF轴转过俯仰角μ,飞机坐标系绕其XF轴转过横滚角γ.
M10~M12为从飞机坐标系到光电跟踪测量基座坐标系的转换矩阵.其中,由于减振器的运动,基座坐标系相对飞机坐标系的三轴姿态角Δθ,Δφ,Δψ.
M13为从基座坐标系到目标坐标系的转换矩阵.其中,基座坐标系沿K1轴平移ΔR.
最后得到测量方程:
CK为目标在中心地平坐标系的坐标,GK为目标坐标系的坐标,Mi为变换矩阵.
2 测量误差分析
2.1 中心地平坐标系(OC1C2C3)位置偏差
该坐标系相对地心质心坐标系的位置偏差是:中心地平坐标系原点的高程差(Δhc);大地纬度误差(Δλc);相对惯性坐标系的大地经度误差[Δ(αc-αs)].
2.2 惯性坐标系(OXYZ)位置偏差
该坐标系相对地心质心坐标系的位置偏差是:惯性坐标系的高程误差(Δhs);大地纬度误差(Δλs);惯性坐标系的航向角偏差(Δψsc).
2.3 飞机的三轴姿态角误差
Δμ(俯仰角);Δγ(横滚角);Δυ(航向角).
2.4 减振器的角振动误差
由于飞机的振动则有:
Δθ(t)=θMsin(ωt+a)
Δφ(t)=φMsin(ωt+a)
Δψ(t)=ψMsin(ωt+a)
其中:θM,φM,ψM—最大角振幅,按均匀分布考虑,(ωt+a)—位相,t—按视频积分时间20ms考虑,α—初位相等于零,ω与飞机的振动主频有关系(这里取ω=150rad/s).
2.5 激光测距误差
激光测距仪最大测量距离(发射功率≥20MW,重复频率10Hz/s)为30km时,测距误差ΔR,其误差分布为正态分布.
3 蒙特卡洛法仿真
3.1 测量误差分析计算程序
利用MATLAB程序进行编程,建立机载光电跟踪测量方程并得出误差分布图,计算流程如图1:

图1 计算流程
3.2 仿真结果
由图2可以看出,地平系高程和地平系纬度具有相似的误差分布,所以它们对该机载光电跟踪测量设备的测量误差的影响是相同的.地平系高程和地平系纬度的名义值一旦确定,二者的误差直方图横轴上有意义的点就是该名义值所在的点,因此地平系高程误差和地平系纬度误差对该机载光电跟踪测量设备的测量误差影响较小;俯仰角振动、横滚角振动和偏航角振动具有相似的误差分布,其中俯仰角振动和横滚角振动的误差分布完全相同.在这三个参量中,对该机载光电跟踪测量设备的目标定位误差的影响最大的是偏航角振动,对该机载光电跟踪测量设备的目标定位误差的影响最小的是俯仰角振动和横滚角振动.

图2 各间接测量量的误差直方图
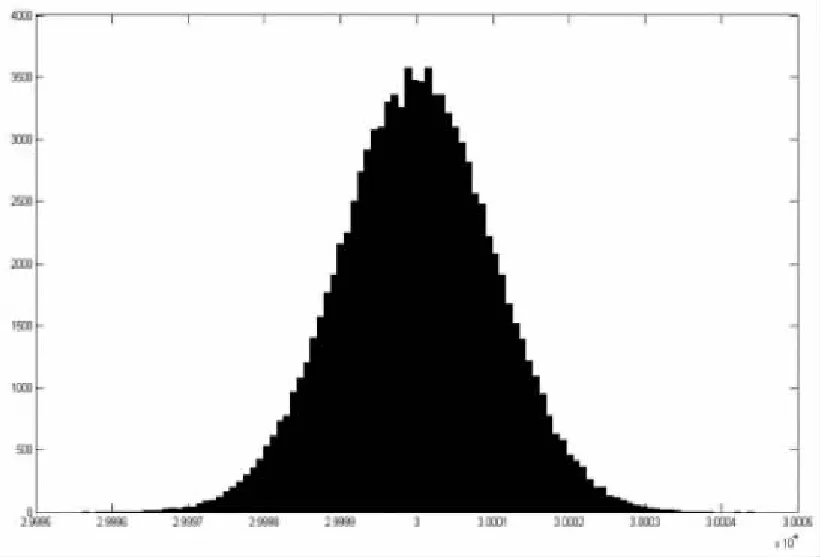
图3 函数R的误差直方图
由图2和图3可以看出,惯地系经差、惯性系纬度、惯性系高程、载机航向角、载机俯仰角、载机横滚角、载机偏向角和激光测距具有相似的误差分布.其中,载机横滚角和载机俯仰角具有完全相同的误差分布,故它们对该机载光电跟踪测量设备的目标定位误差的影响完全相同.载机航向角和载机偏向角具有相同的误差分布,它们的方差大于载机横滚角和载机俯仰角的方差,故它们对该机载光电跟踪测量设备的目标定位误差的影响小于载机横滚角和载机俯仰角对该机载光电跟踪测量设备的目标定位误差的影响.
参考文献:
[1]周志刚.航空综合火力控制原理[M].北京:国防工业出版社学,2006.
[2]王家骐.光学仪器总体设计[M].长春:长春光机所研究生部,2010.
[3]刘通,谢剑斌.飞行仿真试验中飞机飞行参数与坐标系变换[J].计算机技术与发展,2006(10).
[4]于治会.用光电法测量摆动周期的误差分析[J].制导与引信,2008(1).
[5]李宇,张靖.某小型战术导弹系统误差分析方法研究[J].弹道学报,2005(12).
猜你喜欢
航天电子对抗(2022年4期)2022-10-24
汽车实用技术(2022年14期)2022-07-30
南京航空航天大学学报(2022年2期)2022-04-27
北京航空航天大学学报(2021年4期)2021-11-24
防爆电机(2021年2期)2021-06-09
模具制造(2019年7期)2019-09-25
船舶标准化工程师(2019年4期)2019-07-24
火控雷达技术(2016年2期)2016-02-06
应用科技(2015年5期)2015-12-09
航天器工程(2014年5期)2014-03-11