稀疏表示的人脸识别及其优化算法
2012-12-21 13:25:16蔡体健
华东交通大学学报 2012年1期
郑 轶,蔡体健
(1.华东交通大学轨道交通学院,江西南昌300013;2.华东交通大学信息工程学院,江西南昌330013;3.中南大学信息科学与工程学院,湖南长沙410075)
人脸识别问题是一个经典的模式识别问题。近年来,受到压缩感知理论的启发,基于稀疏表示的人脸识别技术得到了广泛研究。基于稀疏表示的人脸识别是利用训练图片构造字典,再通过求解一个欠定方程来求得测试图片的最稀疏线性组合系数,然后根据这些系数来对图像进行识别分类。
稀疏表示的人脸识别问题表示成数学形式为:Y=AX,其中Y∈Rm是m维自然信号,A∈Rm·n是预定义的基(又称为字典),X∈Rn是自然信号在预定义基下的n维稀疏表示。在已知原始信号的基础上,求解其在预定义基下的稀疏表示,是一个稀疏编码问题,可有以下两种求解方式[1-3]:
稀疏正规化约束下的稀疏编码:

误差约束下的稀疏编码:

稀疏编码与信号的压缩感知重构具有相同的数学形式,其主要的求解算法包括最小l0范数法、贪婪迭代匹配追踪系列算法等。其中,匹配追踪类方法为其近似求解提供了有力工具,在稳定性和运行速度方面具有一定的优势。目前常用的匹配追踪类算法包括:正交匹配追踪(orthogonal matching pursuit,OMP)算法[4-5],基于树型搜索的正交匹配追踪算法[6],正则化正交匹配追踪算法[7-8],压缩采样匹配追踪算法[9]等。
1 正交匹配追踪算法
正交匹配追踪思想[4-5]本质上是来自于K“稀疏”,就是从过完备字典的N个原子中寻找K个关键分量,这K个关键分量系数的绝对值应该比其它N-K个分量大得多。算法在每一次的迭代过程中,从过完备原子库里选择与信号最匹配的原子来进行稀疏逼近并求出余量,然后不断迭代选出与信号余量最为匹配的原子。为了减少迭代次数,算法通过递归对己选择原子集合进行正交化以保证迭代的最优性。具体见算法1,其中第5步是贪心选择原子的步骤,q是所选择原子的索引;第6步是将所选择的原子Aq添加到子空间Aφ,Aφ是A的子矩阵;第7步是对已选择的原子进行正交化,并计算信号的表示系数,在此需要计算逆矩阵,矩阵的求逆运算是重量级的运算,往往需要对矩阵进行三角分解或QR分解;第8步是计算最小残差R。
算法1正交匹配追踪算法
第1步 输入:字典A,列信号Y,误差容限ε或稀疏阈值K
第2步 输出:稀疏的系数X
第3步 初始化:设置残差R∶=Y,系数X∶=0,Aφ∶=[ ]
第4步 do while(迭代条件成立)
第5步q∶=max
第6步Aφ∶=[Aφ Aq]
第7步X=
第8步R∶=Y-AφX
第9步 end do
2 改进的正交匹配追踪快速算法

由于F是对称正定矩阵,因此可令,又由于FF-1=I(I为单位矩阵),经过运算可得到:

由于每次迭代都只是增加一列,因此在上式中c和w都是标量,V和Y是向量,而是上一次迭代的逆矩阵,是个已知矩阵,因此F-1的求解变成了向量或向量矩阵的轻量级运算。
为了进一步减少正交匹配追踪算法的计算量,可以跳过残差R的计算,直接计算ATR,并充分利用上一次迭代的结果进行递推。其演算过程如下:

算法2改进的快速正交匹配追踪快速算法
第1步 输入:字典A,列信号Y,误差容限ε或稀疏阈值K
第2步 输出:稀疏的系数X
第3步 初始化:设置残差R∶=Y,系数X∶=0,Aφ∶=[ ],G∶=[ ],Q∶=[ ],n∶=1,product 0=ATY
第4步 do while(迭代条件成立)
第5步q∶=maxk
第6步 Ifn>1 then
第7步 计算c,V,w,Y,X,然后计算
第8步 Else
第9步F-1=
第10步 End if
第11步Aφ∶=[Aφ Aq]
第12步G=
第13步X=F-1Q
第14步ATR=product0-GX
第15步 更新product0和G
第16步 end do
3 在稀疏表示的人脸识别中的应用
基于稀疏表示的人脸识别利用测试人身份的稀疏性来进行人脸识别[10]。数学表示形式为:Y=AX,其中Y∈Rm是测试人脸图像,A∈Rm×n是用已标识的若干个人的n幅人脸图像形成训练字典,每幅图像有m个像素点。X=[0,…,0,XiT,0,…,0]T∈Rn是稀疏系数,除了与测试图像对应的系数为非0,X的其他值大多为0。由于一般情况下n≪m(虽然潜在的情况是n≫m),A是非完备字典,高维的图像数据破坏了方程的欠定性,无法利用现有的稀疏编码算法求解,并且在现实中,噪声或遮挡不可避免,为此改为用Y=AX+e来描述,其中e∈Rn是n维未知噪声,再将此式变换一下:

式中:I是单位矩阵,B=[A I]∈Rm×(n+m);W=∈Rn+m,此时n+m>m,因此基于稀疏表示的人脸识别问题变成求解以下最优化问题,可以用以上的FOMP算法来计算测试样本的表示系数X。

人脸识别问题实际上是一个测试样本的归类问题。获得了测试样本的稀疏表示X后,由于X中的非0系数是与字典中属于某一样本类的原子相关,根据这些非0系数就可以简单快速判断测试样本所属类别。但是由于不同样本类的同一光照角度的图像很相似,容易产生误判,另外噪声的存在使得许多小的非0项和多个类别相关,因此我们需要设计一个更精确的分类器。具体做法是:将X中某样本类的系数保留,其他样本类的系数清0,然后计算测试信号的非线性逼近误差值,最后比较所有样本类的误差值,最小的非线性逼近误差所对应的类即是测试样本归属的类。
4 实验与参数设置
以Yale B人脸库[11](the yale face database B)做人脸识别实验,选用10个人某种姿势下的64种不同光照条件下的640幅图片,每幅人脸图片大小为84×96 像素,对图片进行了直方图均衡化及归一化处理,实验中选取每个人的一部分图片形成训练字典,随机选取其他的图片做测试样本。所选用的机器是Dell笔记本电脑,Genuine Intel CPU 1.66 GHz,1 G内存。
1)两种算法的对比。为了对比经典的OMP算法与改进的OMP算法的优劣,我们为每样本类选择15个光照图片,选择的原则是尽量考虑各种光照角度的图片,从而构建一个大小为8 064×8 214 的训练字典。随机选择不在字典中的300幅人脸图片用于测试,设置稀疏阀值从5变化到50,在相同条件下应用这两种算法进行人脸识别实验,分别记录下两种算法平均100幅人脸识别时间以及对应的识别率。所得到的曲线图如图1所示。
由图1可知,改进的FOMP 算法100幅人脸识别时间少于经典OMP 算法,并且随着稀疏阀值的增加,两种算法的人脸识别时间的差距加大,当稀疏阀值K=50 时,两种算法的100幅人脸识别时间相差达到14秒多。
2)影响识别率的主要因素。在实验中我们发现增加稀疏阀值,相应地人脸识别率随着提高。图2是设置字典大小为8 064×8 214(每样本类15张图片),并给测试图片增加不同比例椒盐噪声的情况下,人脸识别率也随稀疏阀值的变化曲线,由图2可知,在稀疏阀值较小时,增加稀疏阀值可明显提高识别率,但稀疏阀值增加到一定值时(如K>15),识别率趋于稳定,分析其原因可知字典中每样本类的原子数目决定了稀疏阀值的设置。

图1 FOMP算法与OMP算法运行速度的对比Fig.1 The speed comparison between the OMP algorithm and the FOMP algorithm
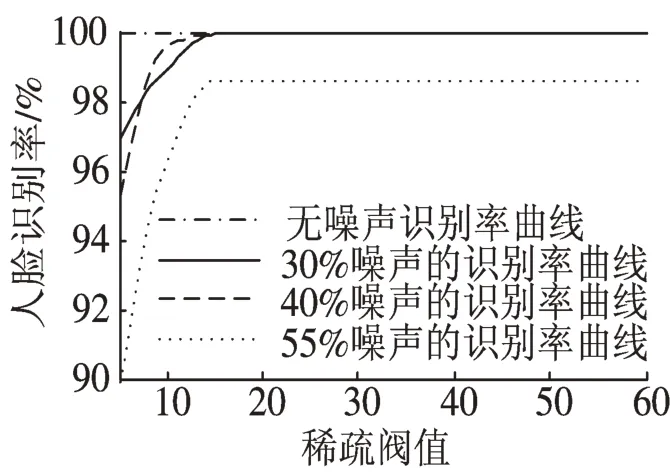
图2 不同噪声下人脸识别率随稀疏阀值的变化情况Fig.2 Face recognition rate changes with the sparse threshold under different noise
为了进一步提高人脸识别率,需对训练字典进行调整。为每个样本类提供各种角度的光照图片,特别是极端光照条件下的人脸图片,能明显提高人脸识别率,见图3(a)。图4是设置稀疏阀值为20,分别为测试人脸添加10%,30%,55%的椒盐噪声的情况下,人脸识别率随训练字典变化的曲线。由图4可知,在字典大小达到一定值时(每样本类20幅图片),人脸识别率基本稳定下来,添加了55%椒盐噪声的测试样本的识别率仍可达到99.5%以上,这远远超过了人类肉眼的识别能力。图3(b)是为测试图像分别添加10%,30%,55%的椒盐噪声后的图片。从图3可知,噪声达30%及以上的图片,人类肉眼已很难识别了。
由图3和图4可知,在噪声较小的情况下(30%以下噪声),每样本类的光照图片只需20张,也就是说在光照变动不超过30°的情况下,人脸图片是可以完全正确识别的,Yale B 人脸库光照的左右变动范围为-130°~130°,上下变动范围为-40°~90°,光照角度并不全,如果补全数据,性能将可以进一步得到提高。
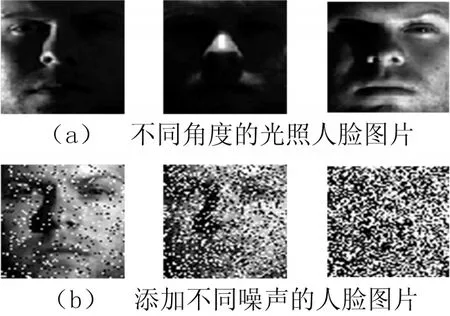
图3 训练图片和测试图片Fig.3 training picture and testing picture
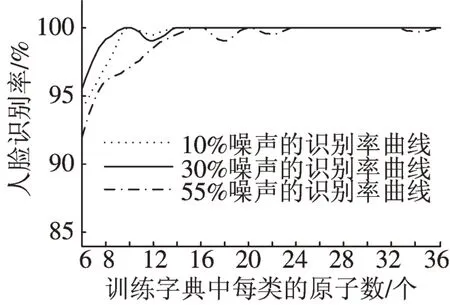
图4 不同噪声下人脸识别率随训练字典大小的变化情况Fig.4 Face recognition rate changes with the size of dictionary under different noise
5 结论
研究提出了一种改进的FOMP算法,此算法是将重量级的矩阵求逆或大矩阵乘积运算转变为轻量级的向量运算或向量矩阵运算,从而提高了算法的运算速度。此算法可广泛应用于稀疏分解或压缩重构,特别适合于人脸识别以及类似的高维数据的分类。将此算法用于人脸识别实验,分析了影响人脸识别率的因素,通过实验验证了在光照角度的变动不超过30°的条件下,可以实现人脸的完全正确识别。如果进一步考虑人脸的表情、姿态等的变化,需要对训练字典的选择做进一步研究。
[1]戴琼海,付长军,季向阳.压缩感知研究[J].计算机学报,2011,34(3):425-434.
[2]李树涛,魏丹.压缩传感综述[J].自动化学报,2009,35(11):1369-1377.
[3]杨荣根,任明武,杨静宇.基于稀疏表示的人脸识别方法[J].计算机科学,2010,37(9):266-269.
[4]TROPP J A,GILBERT A C.Signal recovery from random measurements via orthogonal matching pursuit[J].IEEE Transactions on Information Theory,2007,53(12):4655-4665.
[5]WEI E,SHA I. Orthogonal matching pursuit algorithm for compressive sensing[EB/OL].(2008-08-01)[2011-09-01]http://www.eee.hku.hk/~wsha/Freecode/freecode.htm.
[6]KARABULUT G Z,MOURA L,PANARIO D,et al. Flexible tree search based orthogonal matching pursuit algorithm[C]//IEEE International Conference on Acoustics,Speech,and Signal Processing,2005:673-676.
[7]DEANNA N,ROMAN V. Signal recovery from incomplete and inaccurate measurements via regularized orthogonal matching pursuit[J].IEEE journal of selected topics in signal processing,2010,4(2):310-316.
[8]刘亚新,赵瑞珍,胡绍海,等.用于压缩感知信号重建的正则化自适应匹配追踪算法[J].电子与信息学报,2010,82(11):2713-2717.
[9]DO T T,L GAN,NGUYEN N,TRAN T D. Sparsity adaptive matching pursuit algorithm for practical compressed sensing[C]//Asilomar Conference on Signals,Systems and Computers,2008:581-587.
[10]WRIGHT J,GANESH A,YANG A,et al. Robust face recognition via sparse representation[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence,2009,31(2):210-227.
[11]GEORGHIADES A S,BELHUMEUR P N,KRIEGMAN D J.From few to many:illumination cone models for face recognition under variable lighting and pose[J].IEEE Trans Pattern Anal Mach Intelligence,2001,23(6):643-660.
猜你喜欢
家教世界(2023年28期)2023-11-14 10:13:50
家教世界(2023年25期)2023-10-09 02:11:56
作文中学版(2022年1期)2022-04-14 08:00:34
学生天地(2020年31期)2020-06-01 02:32:06
传感器世界(2019年6期)2019-09-17 08:03:20
西部交通科技(2018年2期)2018-06-14 13:22:40
北京航空航天大学学报(2017年5期)2017-11-23 05:53:59
创新作文(小学版)(2016年19期)2016-08-22 05:54:08
读者(2016年14期)2016-06-29 17:25:50
电脑知识与技术(2015年24期)2015-11-17 12:25:43