一个电器触点故障断开导致钢水包坠落的事故分析及控制电路改进
2012-12-19 07:20王祖生
质量技术监督研究 2012年3期
王祖生
(福建省特种设备检验研究院宁德分院,福建 宁德 352100)
1 引言
某钢铁厂一台通用桥式起重机,在使用中发生钢水包坠落事故。当时,起重机司机用上升档位将钢水包提起到一定高度后,就把控制上升方向的手柄打回零位,再分别开动大、小车运行到指定地点的上方。当司机将控制手柄打到下降方向慢速档要下落时,钢水包突然失控自由坠落。
2 事故原因分析
2.1 事故直接原因
控制起升机构的电路不具备电动机定子异常失电保护功能(即正反向接触器故障导致电动机失控时,制动器应立即上闸)[1-3],加上控制下降方向2~3档用到的上升方向接触器,其连锁触点因烧蚀已断开,则上升方向接触器线圈不得电,电动机就没有了驱动力矩。此时,由于制动器接触器触点自锁作用,制动器接触器还是处于得电状态,就不会断电下闸,从而导致钢水包自由坠落。
2.2 事故原因分析
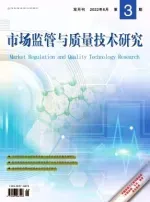
经查,起升控制屏型号为PQR10A,图1是起升控制屏的电气控制原理图。下降方向2~3档用到的上升方向接触器-K1,其连锁触点-K1(11、12),因烧蚀已断开。
2.2.1 PQR10A控制屏设计缺陷
该起升机构的PQR10A控制屏,存在重大事故隐患:制动器接触器自锁。以下情况下,可能发生吊钩上重物自由坠落事故。
(1)上升方向1~6档时,上升方向接触器-K1得电后,-K1(17、18)使-K7线圈得电,开闸-K7(17、18)闭合使制动器接触器自锁。
运行中,上升方向接触器-K1线圈断电,电动机动力电源断电,失去驱动力矩。此时,由于制动器接触器触点-K7(17、18)自锁作用,-K1(17、18)断开也不能使制动器接触器-K7断电下闸,发生吊钩、重物自由坠落事故。
(2)下降方向2~3档时,上升方向接触器-K1得电后,-K1(17、18)使-K7线圈得电,开闸-K7(17、18)闭合使制动器接触器自锁。
运行中,上升方向接触器-K1线圈断电,电动机动力电源断电,失去驱动力矩。此时,由于制动器接触器触点-K7(17、18)自锁作用,-K1(17、18)断开也不能使制动器接触器-K7断电下闸,发生吊钩、重物自由坠落事故。
(3)下降方向4、5、6各档时,下降方向接触器-K2得电后,-K2(17、18)使-K7线圈得电,开闸,-K7(17、18)闭合使制动器接触器自锁。
运行中,下降方向接触器-K2线圈断电,电动机动力电源断电,失去驱动力矩。此时,由于制动器接触器触点-K7(17、18)自锁作用,-K2(17、18)断开也不能使制动器接触器-K7断电下闸,发生吊钩、重物自由坠落事故。
(4)重物停在空中,下降方向接触器-K2回路断路。主令控制器直接打下降4、5、6档,下降方向接触器-K2不能得电。由于经过下降2、3档时,上升方向接触器-K1得电,-K1(17、18)闭合,使-K7线圈得电,开闸。-K7(17、18)闭合使制动器接触器自锁。打下降4、5、6档时,下降方向接触器-K2线圈不能得电,电动机动力电源不能得电,无驱动力矩。此时,由于制动器接触器触点-K7(17、18)自锁作用,-K2(17、18)断开不能使制动器接触器-K7断电下闸,发生吊钩、重物自由坠落事故。

图1 PQR10A屏的电气控制原理图
2.2.2 下降方向接触器触点故障断开
经检查,控制屏上的下降方向接触器-K2控制回路中的上升方向接触器的连锁触点-K1(11、12),因烧蚀已断开。符合上述分析中(4)的“重物停在空中,直接打下降第6挡”的情况。
当时,重物停在空中,直接打下降第6挡,经下降2、3档时,已开闸,再到下降接触器线圈断路的第6档,由于连锁触头-K1(11、12)因烧蚀已断开,电动机驱动电源不能得电,吊钩在重物作用下做自由落体运动。
如果,只是PQR10A控制屏存在“制动器接触器自锁”的重大事故隐患,下降方向接触器线圈回路中的上升方向接触器的连锁触头-K1(11、12),不发生故障断开,这起事故就不会发生。
3 改进设计意见
保留制动器接触器-K7自锁的控制环节,增加方向接触器全部断电时,强迫制动器制动的控制环节,见图2。
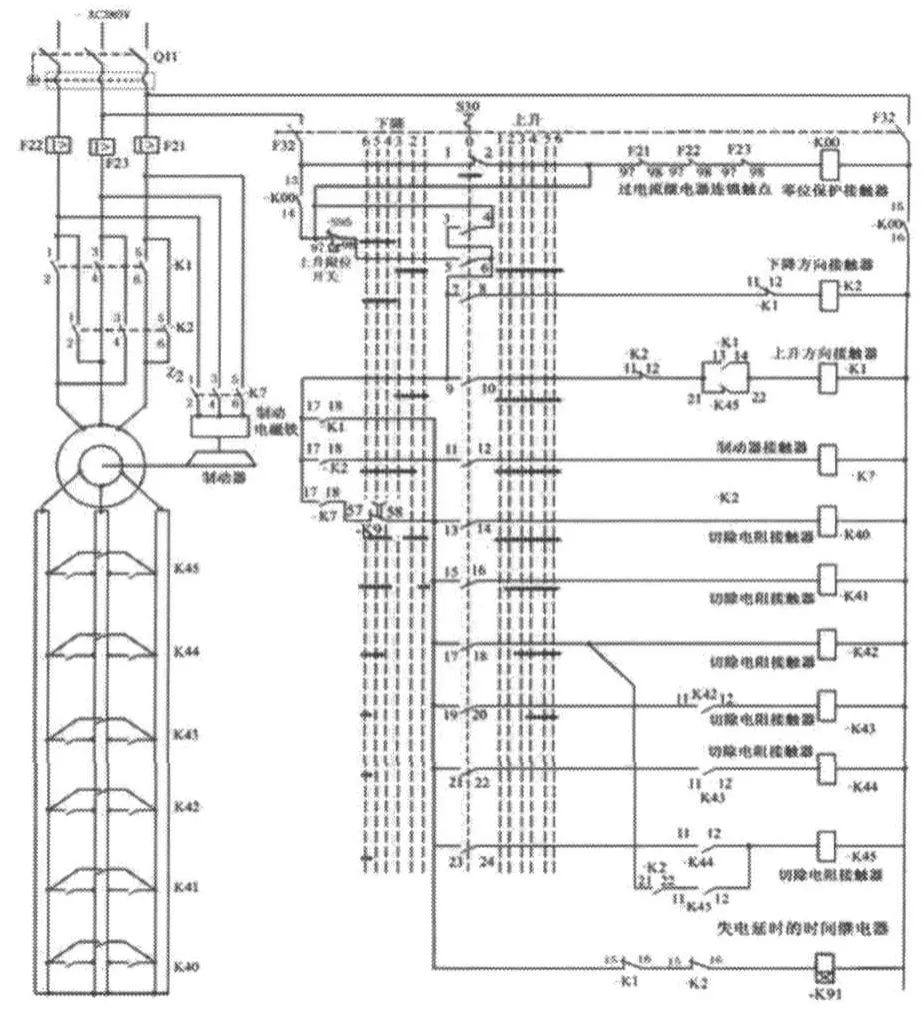
图2 方向接触器全部断电时,强迫制动器制动的线路
图2 为方向接触器全部断电时,强迫制动器制动的控制线路。设置一个得电延时、失电不延时的时间继电器-K91,当电动机所有方向接触器全部断电时,时间继电器-K91强迫得电,-K91(57、58)延时断开,制动器接触器-K7延时失电,强迫制动器制动。
上述重物自由坠落事故预防环节,采用了时间继电器,故障停车会出现滞后下闸的现象,滞后时间就是时间继电器的延时时间,故障停车出现滞后下闸的现象是允许的。
正常停车(回零位停车)是由制动器接触器线圈回路中的主令控制器触点(断开)来完成的,不是由上述环节中方向接触器的触点及上述环节中的时间继电器决定。
正常停车(回零位停车)出现滞后下闸的现象是不允许的。正常停车(回零位停车)出现滞后下闸的时间由主令控制器触点断开到电动机断电失去驱动力矩,由主令控制器触点断开到制动器完全抱住制动轮的时间差决定。
为了避免出现滞后下闸的现象,在下降各档回零位正常停车时, 必须设置先下闸后断电(电动机)的防止溜钩的控制环节,否则正常停车时有溜钩的可能。
上升方向回零停车时,也可能发生滞后下闸的现象,有溜钩的可能。如有必要,也可设置先下闸后断电的防止溜钩的控制环节。
4 结论与建议
4.1 结论
起升机构不具备电动机定子异常失电保护功能(即正反向接触器故障导致电动机失控时,制动器应立即上闸)[1-3],是这起事故的直接原因。
4.2 建议
(1)起重机械的设计制造单位进行电气系统设计时,应避免正反向接触器故障导致电动机失控的缺陷,同时严格控制电器元件的质量。
(2)使用单位应加强起重机械日常维护保养,尤其不能忽视电气方面。
(3)起重机械的型式试验机构,应当加强对起重机械设计质量的把关,特别是电气系统设计方面。
(4)起重机械的法定检验机构,应当对正反向接触器故障导致电动机失控的保护功能进行检验,严格把关。
[1]中华人民共各国国家标准.GB/T 3811-2008 起重机设计规范[S].北京:中国标准出版社,2008.
[2]中华人民共各国国家标准.GB 6067.1-2010 起重机械安全规程 第1部分:总则[S].北京:中国标准出版社,2010.
[3]特种设备安全技术规范.TSG Q7016-2008 起重机械安装改造重大维修监督检验规则[S].北京:新华出版社,2008.
猜你喜欢
装备制造技术(2020年1期)2020-12-25
防爆电机(2020年3期)2020-11-06
中国特种设备安全(2019年7期)2019-09-10
建材发展导向(2019年5期)2019-09-09
电子制作(2019年14期)2019-08-20
中国特种设备安全(2019年5期)2019-07-16
发明与创新·中学生(2018年10期)2018-10-15
意林·少年版(2018年2期)2018-02-07
家庭百事通·健康一点通(2017年9期)2017-09-22
创新作文(1-2年级)(2017年1期)2017-04-19