
Numerical and Model Test Study on the Hydrodynamic Performance of FDPSO with Spreading Mooring System
2012-12-13 02:56WEIYuefengYANGJianminCHENGangHUZhiqiang
船舶力学 2012年6期
WEI Yue-feng,YANG Jian-min,CHEN Gang,HU Zhi-qiang
(State Key Laboratory of Ocean Engineering,Shanghai Jiao Tong University,Shanghai 200240,China)
1 Introduction
The concept of FDPSO,combining the FPSO with a drilling unit,was proposed in 1990s.FDPSO not only reduces the up-front cost,but also can be put in operation more quickly,many oil companies are particularly interested in it.After ten years research,there have been many innovations and two FDPSOs have been put into use.The first FDPSO,which was converted from a VLCC class tanker,was used in Azurite field by Murphy West Africa Ltd in August 2009[1].16-point mooring system is adopted to position the platform.The second FDPSO,SEVEN DRILLER,was applied in the Brazil,in November 2009.The main hull of SEVEN DRILLER is a cylinder with DP-3 dynamic position system.
FDPSO is placed in an oilfield for a long time.Three manners are used to position the hull,such as dynamic positioning,single point mooring and spreading mooring position.Dy-namic positioning is not limited by water depth and can position the platform quickly and accurately.But the energy consumption is huge.The significant feature of single point mooring system is the weather-vane effect.When the sea state is severe,the hull may rotate around the turret to keep the hull in a heading wave state.Therefore,the wave force on the hull is reduced,and the motion character of the hull is improved.Due to the drilling equipment,FDPSO hull with single point mooring system can only rotate in a narrow range,and cannot rotate in a 360°range.
Spreading mooring system is able to position the hull.When the sea state is severe,the load of the mooring line is large.Until now,spread mooring system is mainly employed to position the FDPSO hull.Pollack et al[2-3]adopted model test method to study the hydrodynamic performance of FDPSO with 12 point mooring and 8 point mooring system in West Africa.Poldervaart et al[4]applied AQWA software to make the hull/mooring time domain coupled analysis of the above-mentioned FDPSO to research the character of spreading mooring system of FDPSO.Halkyard et al proposed a semi-submersible FDPSO concept with spreading mooring system.Model test was carried out to measure the motion character of the FDPSO in a-hundred-year return period sea state of West Africa and Brazil[5].Model test was performed about FDPSO with 4-point mooring system in State Key Laboratory of Ocean Engineering in Shanghai Jiao Tong University.The hydrodynamic performance of FDPSO hull in West Africa is studied[6].Because the effect of axial stiffness of mooring line on the horizontal motion of FDPSO is remarkable,Wei et al[7]carried out hull/mooring time domain coupled analysis with different axial stiffness.
Numerical method and model test are employed to study the hydrodynamic performance of FDPSO with 16-point mooring system in the present paper.The environment conditions are one-year and a-hundred-year return period sea state of the South China Sea.The numerical results are compared with the test results to verify the numerical method.The motion characters of FDPSO hull in different sea state with different incident wave direction are calculated.Reference to the cooperation condition for drilling of the platform,a critical environment condition for drilling operation in the South China Sea is acquired.And the hydrodynamic performance of FDPSO with spreading mooring system in South China Sea is studied.
2 Numerical method
In order to describe the motion of the floating body,two right-hand Cartesian coordinate systems are established,such as globle coordinate system o0-x0y0z0and body coordinate system o-xyz.The origin of the globle coordinate system locates in the still water level.The o0z0axis is normal to the still water level and the points upward the still water.The body coordinate system o-xyz is defined moving with the floating body.The o-xy plane coincides with the waterline plane,ox axis points to the bow of the floating body and oz axis points upwards through the center of gravity.The two coordinate systems are displayed in Fig.1[8].
Based on the wave diffraction/radiation theory,the hydrodynamic coefficients,first order wave force and second order mean force are calculated.The response amplitude operators(RAOs)for the motion of FDPSO hull are obtained by solving the frequency domain motion equation,which is described as bellow[9]:

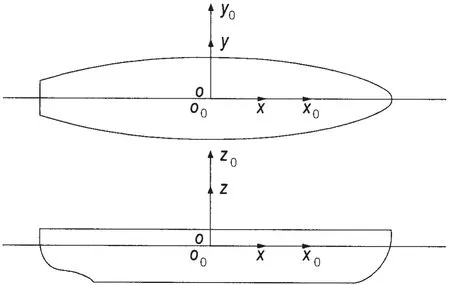
Fig.1 Coordinates system of body motion
where M represents a mass and inertia matrix of the hull,μ denotes an added mass matrix,λ stands for a radiation damping,C is a hydrostatic stiffness matrix,and F(1)represents a vector of first wave force.x,andare the displacement,velocity and acceleration vectors,respectively.
In terms of the wave spectrum,the time series of wave force can be obtained by Fast Fourier Transform Algorithm.Furthermore,the time series for six DOF motion of the hull is solved from the time domain motion equation.The motion equation of time domain coupling analysis is expressed as bellow:

where μ∞denotes the added-mass matrix at the frequency ω=∞,F(2)stands for the second order mean force,which is calculated by far field formulation.Fmoorrepresents the mooring load,which is computed by finite element method.h(t-τ)is the retardation function,which can be obtained by the convolution of the added-mass and damping:

SESAM software,which is developed by DNV,is employed to calculate the hydrodynamic performance of FDPSO.The frequency domain calculation is performed by Wadam module,and the time domain hull/mooring coupled analysis is carried out by DeepC module.The panel model of FDPSO hull,which is discretized by 2 396 panels,is shown in Fig.2.

Fig.2 The panel model of FDPSO hull
3 Model test
Model test was conducted in Deepwater Offshore Basin of Shanghai Jiao Tong University.Reference to the principal dimension of the hull,environment condition and equipment of the basin,the linear scale ratio λ between the prototype and the model is chosen to be λ=81.The effect of viscosity is ignored for the motions of ship or ocean engineering structures in waves.In the present test,the Froude number and the Strouhal number of the model and prototype are kept the same,which means that the similarity between the gravitational force and the inertia force is satisfied[10],i.e.

where,V,L and T represent the velocity,linear dimension and motion period of the body,respectively;the subscripts m and s denote the variables for the model and prototype,respectively.
Free decay tests,white noise tests and irregular tests are involved in the model test of FDPSO.Decay tests were performed in still water to measure the nature period and damping coefficient for heave,roll and pitch motion of FDPSO hull.The natural periods are determined from spectra analysis of the time series,while the damping coefficients are estimated from the logarithmic decrement.White noise test was carried out for obtaining the RAOs of the hull,with the incident wave directions of 180°,135°and 90°.One-year and a-hundred-year return period sea states of South China Sea were simulated in irregular wave tests.And the time series for the motion of the hull and the load of the mooring line were achieved.The time of the irregular test lasted for 10 minutes,corresponding to one and a half hours for prototype,and the measurements were recorded on the computer at a sampling rate of 25 Hz.
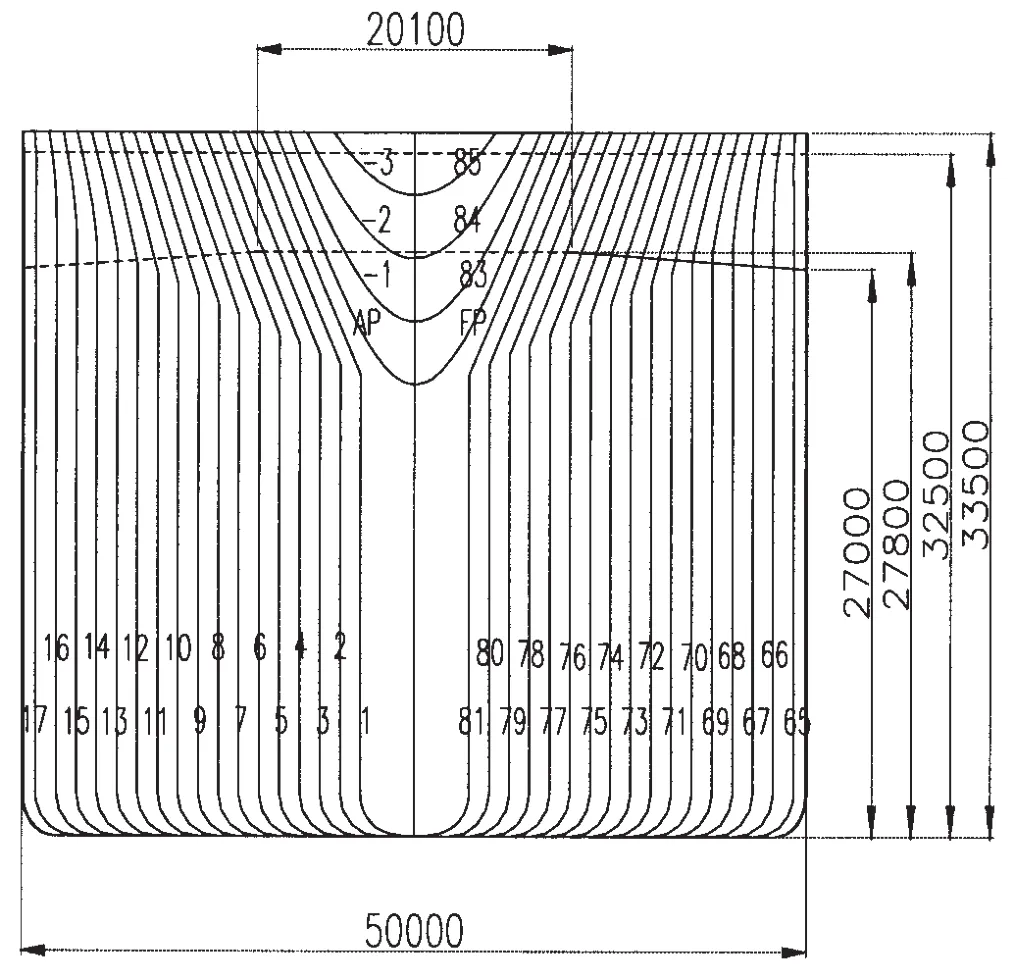
Fig.3 The transverse section of the hull
3.1 Model of FDPSO
The model of the hull is made of fiberglass-reinforced plastic and the superstructure of the FDPSO is made of foam.The displacement,center of gravity and radii gyration are obtained by adjusting the weight and the position of the foundry weight.The principal dimension of the hull is listed in Tab.1 and the line drawings are depicted in Fig.3 and Fig.4.

Tab.1 Principal particulars of FDPSO hull

Fig.5 The arrangement plan for spreading mooring system of FDPSO
3.2 Truncated design of mooring system
Sixteen mooring lines,which were divided into four groups,were involved in the spreading mooring system of FDPSO.Each mooring line is composed of three sections.The upper section,which joints the fairlead,is made of chain.The middle section is wire rope.The bottom section,which is connected to the anchor,is also made of chain.The arrangement of mooring system is depicted in Fig.5.Considering the restriction of the size of the deepwater offshore basin,the hybrid model testing technique is adopted.The arrangement,composition and pretension of the truncated mooring system are the same as the actual mooring system.By numerical calculation and optimal design,the length,stiffness and weight of every section are adjusted to make sure that the static characteristics of truncated mooring system agree with the actual mooring system[11].Chain-wire-chain mooring lines used in 1 500 m water depth are truncated into e-quivalent combined lines in 500 m depth,corresponding to the 6.17 m of the test depth.The parameters of actual and truncated mooring line are listed in Tab.2.The vertical profile sketch of truncated and actual mooring line is shown in Fig.6 and the restoring force of the truncated systems and actual full depth are described in Fig.7.
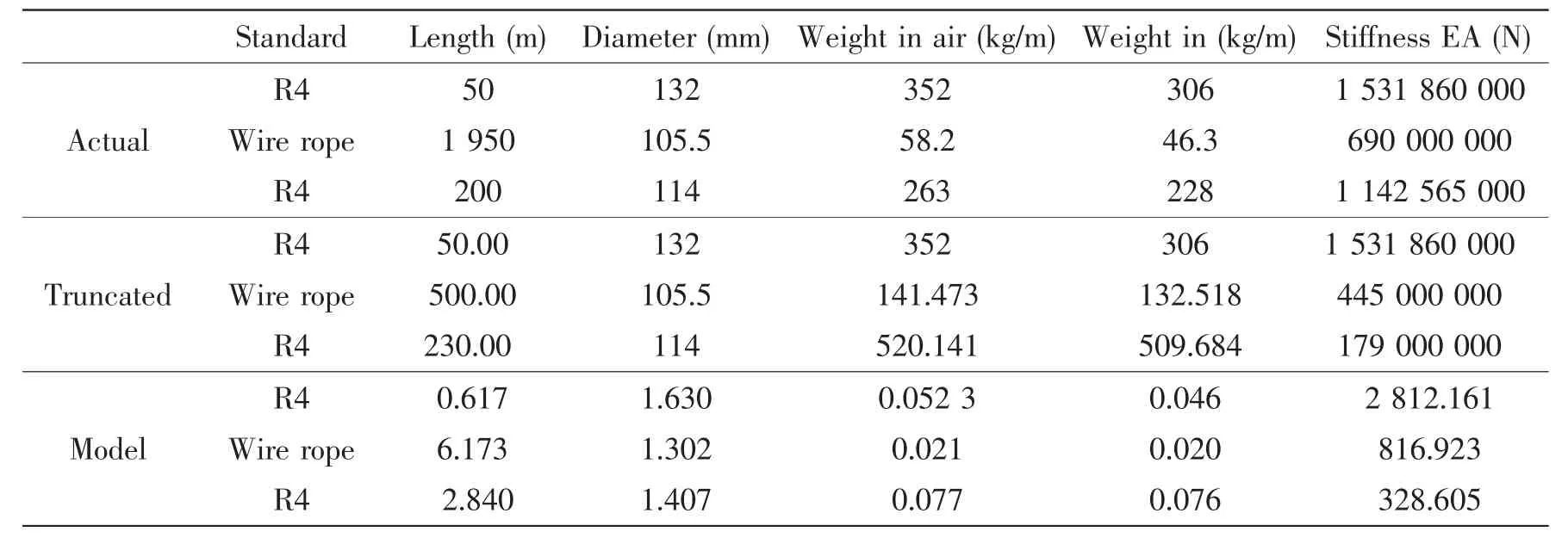
Tab.2 The parameters of actual,truncated and model mooring line

Fig.6 Vertical profile of truncated and full depth mooring systems

Fig.7 Offset line of mooring line system
3.3 Environment condition
One-year and a-hundred-year return period sea states of South China Sea were simulated in irregular wave tests.The wind and the current were simulated by steady wind and surface current,respectively.JONSWAP spectrum was adopted to imitate the irregular wave,thepeakedness of which is γ=3.0.Three incident wave directions,180°,135°and 90°,were involved in white noise test.The direction of wind,wave and current in irregular are 180°.The parameters of the environment condition in white noise test and irregular test are listed in Tab.3.The arrangement of model test is depicted in Fig.8.

Tab.3 The parameters of environment condition(Prototype)

The parameters of environment condition(Model)

Fig.8 The overall arrangement of FDPSO model test
4 Results and discussion
Two load conditions of FDPSO hull,full load and ballast condition,were investigated in the model test.Only the results of ballast load were demonstrated in the present paper.The hydrodynamic performance of the full condition is almost the same as the ballast load.
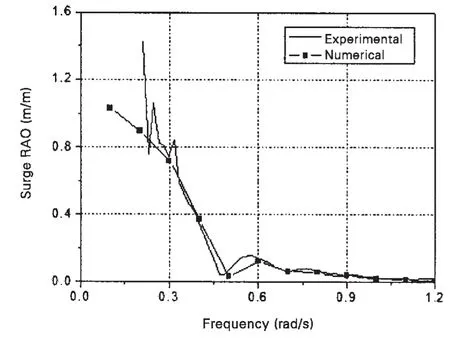
Fig.9 RAO for surge motion of FDPSO hull with the wave direction of 180°
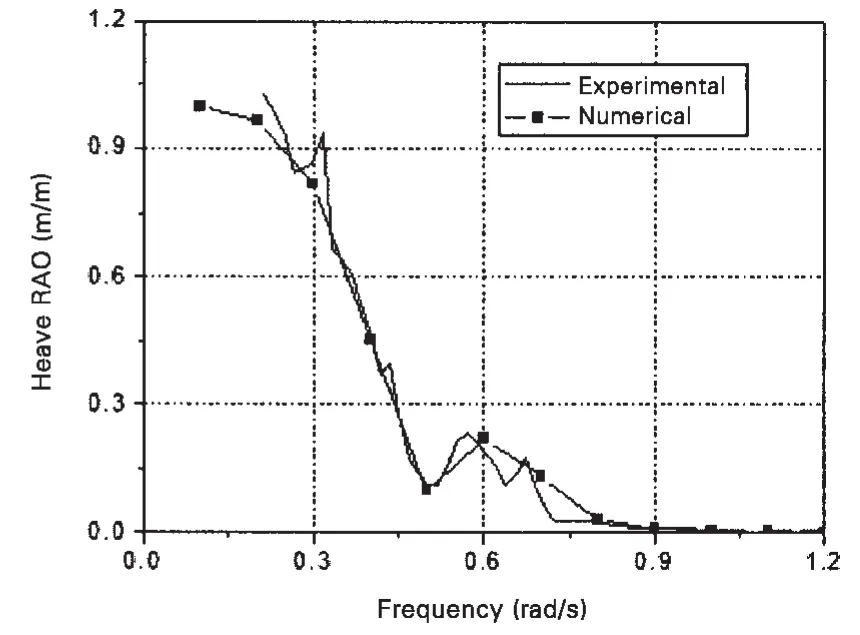
Fig.10 RAO for heave motion of FDPSO hull with the wave direction of 180°
4.1 Frequency domain results
The RAOs of FDPSO hull were calculated over a frequency range 0.05 to 1.2 rad/s,with the incident wave direction of 180°,135°and 90°.The numerical results were compared with the results of white noise test.Figs.9-20 depict the comparison between numerical results and the test results.
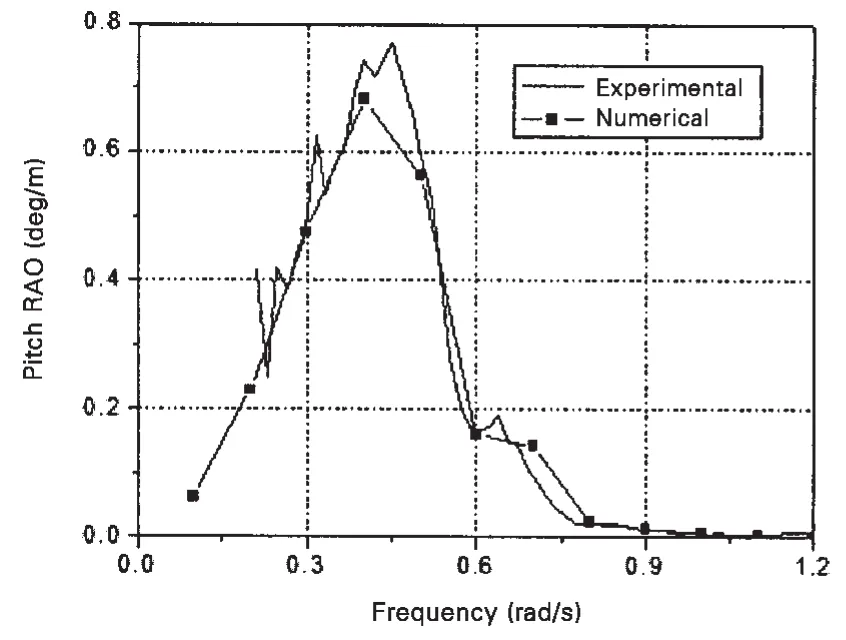
Fig.11 RAO for pitch motion of FDPSO hull with the wave direction of 180°

Fig.12 RAO for surge motion of FDPSO hull with the wave direction of 135°

Fig.14 RAO for heave motion of FDPSO hull with the wave direction of 135°

Fig.13 RAO for sway motion of FDPSO hull with the wave direction of 135°

Fig.15 RAO for Roll motion of FDPSO hull with the wave direction of 135°

Fig.16 RAO for pitch motion of FDPSO hull with the wave direction of 135°
Figs.9-20 also describe the RAOs for the 6-DOF motion of FDPSO hull with wave directions of 180°,135°and 90°.It is obvious that the numerical results show good agreement with the test result.Therefore,the numerical method is reliable to calculate the hydrodynamic performance of FDPSO hull in frequency domain.The resonant frequency for heave,roll and pitch motion of the hull are 0.5 rad/s,0.4 rad/s and 0.5 rad/s,respectively.When the incident wave direction is 90°,the heave and roll motion are all large.The maximum of the RAO for heave and roll response are 1.35 m/m and 8.0 deg/m,respectively.Therefore,the roll motion of the hull is noteworthy.When the wave direction is 135°,the pitch motion is severe.The maximum of the pitch RAO is 0.82 deg/m.From Fig.13,it can be seen that there is discrepancy between numerical results and test results in high frequency.It is because the effect of the stiffness of the two-point mooring lines,which were used to position the hull in white noise.Due to the low-frequency motion is prominent in sway and yaw response,the error is not important.
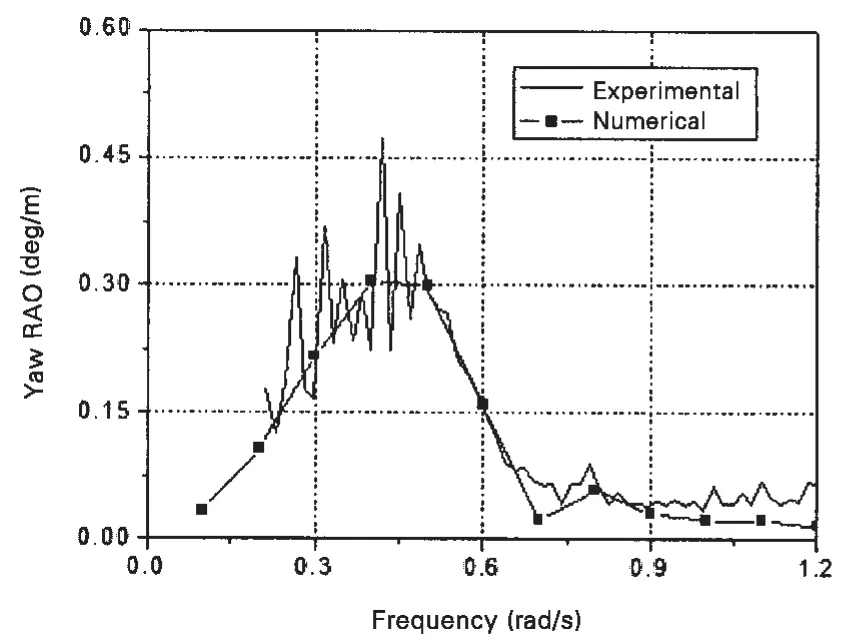
Fig.17 RAO for yaw motion of FDPSO hull with the wave direction of 135°

Fig.18 RAO for surge motion of FDPSO hull with the wave direction of 90°
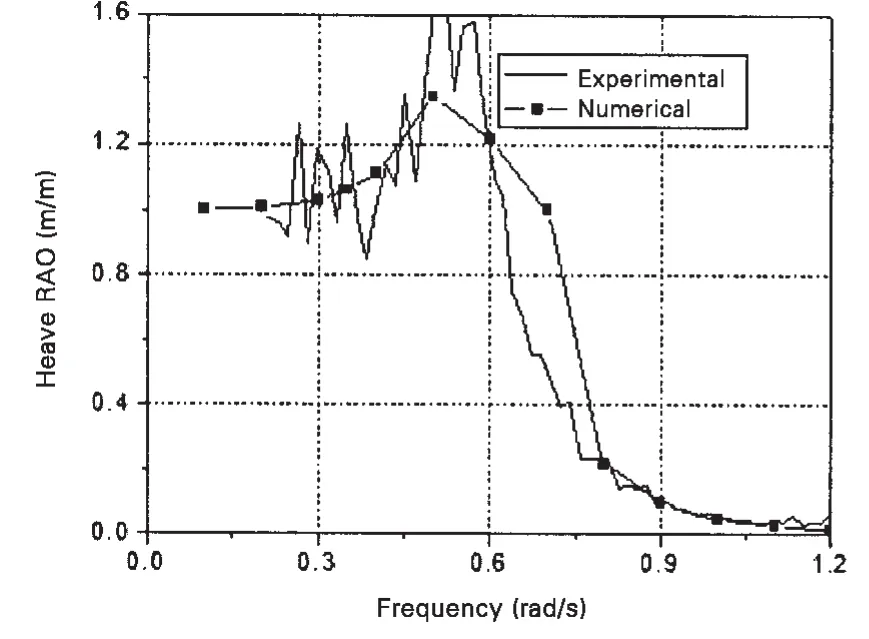
Fig.19 RAO for heave motion of FDPSO hull with the wave direction of 90°

Fig.20 RAO for pitch motion of FDPSO hull with the wave direction of 90°
4.2 Time domain results
The hull/mooring time domain coupled analysis of FDPSO was carried out.Time series response spectrum and statistics for 6-DOF motion of the hull were obtained.Numerical results were compared with the results of irregular wave test.
4.2.1 Results of operating condition of the South China Sea
Figs.21,23 and 25 depict the time series for surge,heave and pitch motions of FDPSO hull in one-year return period sea state of the South China Sea.In order to exhibit the details of motion response,the time plots are selected from 2 000 s to 3 000 s.While the response spectrum for surge,heave and pitch are described in Figs.22,24 and 26.The statistics are tabulated in Tab.4.

Fig.21 The time series for surge motion with one year return period sea state

Fig.22 The response spectrum for surge motion with one year return period sea state

Fig.23 The time series for surge motion with one year return period sea state

Fig.24 The response spectrum for heave motion with one year return period sea state

Fig.25 The time series for pitch motion with one year return period sea state
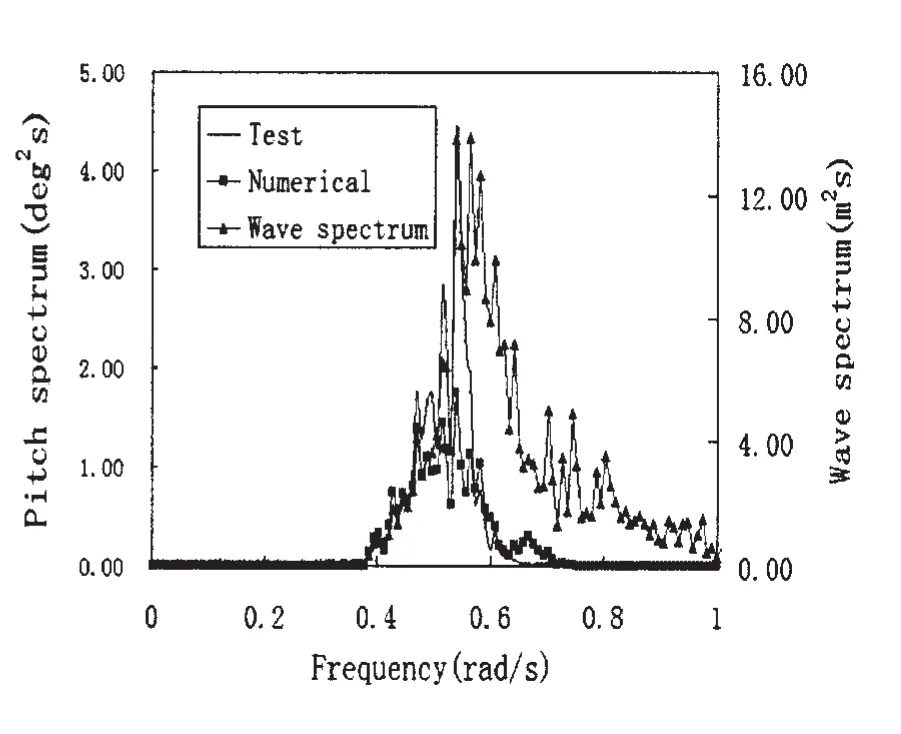
Fig.26 The response spectrum for pitch motion with one year return period sea state
The comparison between the numerical results and the test results shows that the numerical results agree well with the experimental data,reflecting the numerical method is accurate.It can be seen that for the surge response of the hull,slowly drift motion is dominant.The peak period of surge spectrum is 168.365 s,which is far from the peak period of wave.The effect of second order wave force on the surge motion is significant.For heave and pitch response,the peak periods are 11.10 s and 11.63 s,respectively,which indicates that wave frequency motion is the main component for heave and pitch motion.In one year return period sea state of South China Sea,the maximal motions for surge,heave and pitch are 13.783 m,0.883 m,and 1.451°,respectively.It is suitable for drilling operation of FDPSO in one-year return period sea state of the South China Sea.

Tab.4 The statistics results for the motion of FDPSO hull in operation condition of the South China Sea
4.2.2 Results of extreme condition of the South China Sea
Figs.27,29 and 31 depict the time series for surge,heave and pitch motions of FDPSO hull in one-year return period sea state of the South China Sea.While the response spectrum for surge,heave and pitch is described in Figs.28,30 and 32.The statistics are tabulated in Tab.5.
In one-hundred-year return period sea state of the South China Sea,the time series and the response spectrums for surge,heave and pitch motions of FDPSO hull are depictured.For surge motion,low frequency motion consists of the main part,which could be obtained from the Fig.27 and Fig.28.The peak period of surge spectrum is 137.118 s.While the peak periods for heave and pitch spectrums are 15.54 s and 14.64 s,respectively.Therefore,the wave frequency motion is obvious for heave and pitch motions.The maximal motions for surge,heave and pitch are 41.205 m,5.011 m and 5.766°,respectively.The motions of FDPSO hull are violent and green water will happen in extreme condition of the South China Sea,which is not fit for drilling operation.

Fig.27 The time series for surge motion with one year return period sea state

Fig.28 The response spectrum for surge motion with one year return period sea state
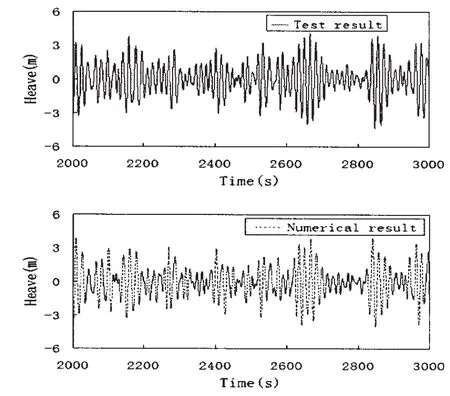
Fig.29 The time series for heave motion with one year return period sea state
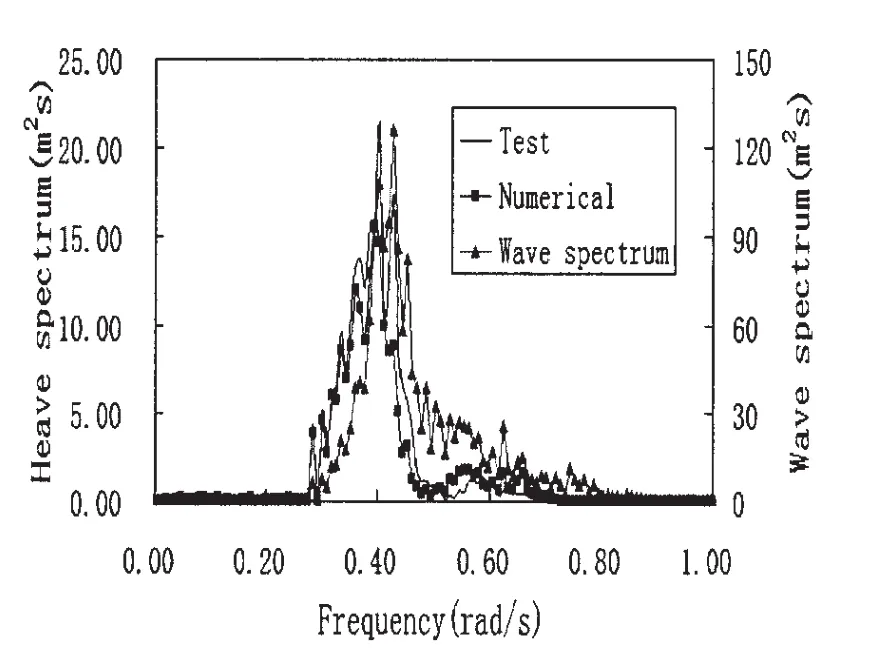
Fig.30 The response spectrum for heave motion with one year return period sea state

Fig.31 The time series for pitch motion with one year return period sea state

Fig.32 The response spectrum for pitch motion with one year return period sea state

Tab.5 The statistics results for the motion of FDPSO hull in extreme condition of the South China Sea
5 Conclusions
FDPSO is a new type of offshore platform which is more suitable for oil exploitation in deep water.The oil and natural gas in the South China Sea is rich,but the environment condition is severe.The hydrodynamic behavior of FDPSO with spreading mooring system in the South China Sea is investigated by numerical method and model test in deepwater offshore basin of SKLOE.The numerical results were compared with the test results and some conclusions can be drawn:
(1)The RAOs from frequency domain method show good agreement with the results of white noise test,reflecting that the numerical method is reliable.The maximum of the RAO for the roll response is 8.0 deg/m.Therefore,the roll motion of the hull in beam sea is significant.
(2)The results of time domain coupled analysis for FDPSO agree well with the results of irregular wave test,which indicates that the hull/mooring time domain coupled analysis method is credible.
(3)For the horizontal motion of FDPSO with spreading mooring system,the effect of second order wave force is noteworthy and the slow drift motion is the main composition.While for vertical motion,wave frequency motion is prominent.
(4)In one-year return period of the South China Sea,the maximums for surge,heave and pitch are 13.783 m,0.883 m,and 1.451 m,respectively.It is suitable for drilling operation of FDPSO.In a-hundred-year return period sea state,the maximal motions are 41.205 m,5.011 m and 5.766°,respectively.It is harmful for the equipment and mooring system of FDPSO and it is not fit for drilling operation.
Acknowledgements
The model tests were conducted by State Key Laboratory of Ocean Engineering in Shanghai Jiao Tong University,and financially supported by the National Scientific and Technology Major Project(Grant No.2008ZX05026-006)and CNOOC-SJTU Deep water engineering technique center.
[1]Harry Howard,Ken Hampshire,Jeffrey Moore,et al.First-ever FDPSO at work on Azurite field development[J].Offshore,2009,69(11):56-65.
[2]Pollack J,Naciri M,Poldervaart L.The tension leg deck from drawing board to numerical design tools[C]//Proceedings of the 2000 Offshore Mechanics and Artic Engineering Conference.Paper OMAE-00-4001-February 14-17,2000.New Orleans,Louisiana,2000.
[3]Pollack J,Poldervaart L,Naciri M.A surface tree riser tension systems for FPSOs[C].Proceedings of 2000 Offshore Technology Conference.Paper OTC 11902,2000.
[4]Poldervaart L,Pollack J.A dry tree FPDSO unit for brazilian waters[C].Proceedings of 2002 Offshore Technology Conference.Paper OTC 14256,2002.
[5]Halkyard J,Choi G,Prislin I,et al.The“BOX Spar”floating production,drilling,storage,and offshore vessel for the Gulf Mexico and Brazil[C]//Offshore Technology Conference,OTC-11905,1-4 May 2000.Houston,USA,2000.
[6]Final model test report on a FPDSO concept[R].SKLOE Report,2001.
[7]Wei Yuefeng,Yang Jianmin,Chen Gang,et al.The effect of axial stiffness of mooring lines on the horizontal motion of FDPSO[J].Science China G,2011,54(1):10-15.
[8]Li Xin.Research on the hydrodynamic response of tower yoke mooring FPSO system[R].Shanghai:Shanghai Jiao Tong U-niversity,2005.
[9]Dai Yishan,Duan Wenyang.Potential flow theory of ship motion in waves[M].Beijing:National Defense Industry Press,2008.
[10]Yang Jianmin,Xiao Longfei,Sheng Zhenbang.Model test research on the hydrodynamic performance of ocean engineering[M].Shanghai:Shanghai Jiao Tong University Press,2008.
[11]Su Yihua.Truncation of mooring system model of deepwater platform and experimental research[R].Shanghai:Shanghai Jiao Tong University,2009.
- 船舶力学的其它文章
- Steady Interaction Numerical Simulation of Cavitating Turbulent Flow between Ship Hull and Propeller
- A Simple and Efficient Method for the Coupled Motions of Multiple Bodies
- Experimental and Numerical Study on Hydrodynamic Performance of Impermeable Comb-Type Breakwater
- A Variational Method for the Homogenous State-vector Equation of Thermoelastic Bodies
- Discussion of Some Important Parameters in Fatigue Loading Calculation for Ship Structural Design
- Dynamic Optimization of Ship Grillages based on Grillage Dynamic Stiffness Algorithm and Scheme Database