
全站仪二次开发技术在工业测量中的应用研究
2012-12-11 06:07邵成立于宗伟
测绘通报 2012年1期
王 智,邵成立,于宗伟
(青岛市勘察测绘研究院,山东青岛266032)
一、引 言
在工业制造领域,常常需要在现场实时获取构件上特定点的三维坐标并及时获取相关几何参数。如在船舶制造中,检测人员需实时获取船体分段平整度、冲视角度等几何信息;在送变电施工中,需要进行两根电杆间的弧垂测量和弧线测量;在储油罐的使用过程中,需要定期测量油罐的罐壁倾斜度、浮盘水平度及不均匀沉降;在大型工业构件生产车间,测量人员需要获取构件的尺寸与设计数据的偏差。在传统工业制造作业中,检测人员主要使用游标卡尺、水准仪、激光测距仪等设备获取构件的空间数据,滞后的数据处理严重影响了生产效率。
随着全站仪及光电技术的发展,越来越多的企业选择全站仪来进行工业测量,通过全站仪自身的测量功能,如对边测量、点投影等,测量人员可以实时方便地获取构件的空间几何信息。但仍有许多工况的数学模型需要大量的后处理时间,如空间拟合、坐标转换、容积计算等。本文探讨了工业测量坐标系的实现算法,并通过全站仪机载程序等二次开发方式研发了若干工业测量软件,并在一些企业中得到了成功应用。
二、工业测量坐标系
1.X轴点1—点2,Y轴点3坐标系
在工业构件检测过程中,常常需要以构件上特定的特征线作为基线或以特定的平面作为基面建立空间三维直角坐标系,如在船舶等工业制造领域,测量船台上分段的几何尺寸时需要以船台的中线为坐标轴建立坐标系,测量船舶艏艉分段的半宽时就需要以分段的底面为坐标面建立坐标系,建立适当的坐标系可以方便检测人员从测量点的三维坐标数据中直接获取分段的空间尺寸信息。
最常用的一种工业测量坐标系是“X轴点1—点2,Y轴点3坐标系”,如图1所示。将测量第1个点作为坐标系原点,点1至点2的连线作为X轴,点1、点2和点3确定的平面为XOY平面,坐标轴的方向遵循右手法则,从第4个点开始所测量获得的坐标都属于该坐标系。
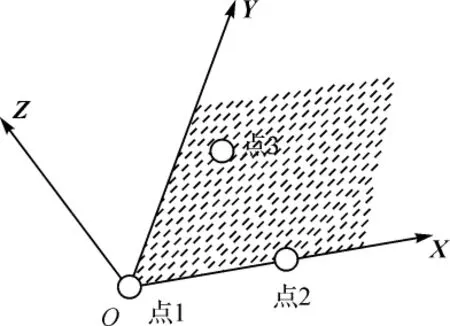
图1 X轴点1—点2,Y轴点3坐标系
2.空间三维直角坐标系转换
三维空间新、旧坐标系之间的相互位置关系,可以通过新坐标系的原点O'在旧坐标系内的坐标(x1,y1,z1),以及新坐标系的坐标矢量在旧坐标系内的方向向量(X,Y,Z)所确定。通常情况下,空间三维直角坐标转换是移轴和转轴两种坐标变换的合成。因此,一个坐标系Oxyz转换到另一个坐标系O'x'y'z'可以分为两步进行:先移轴,使原点O与O'重合,变成辅助坐标系 O″x″y″z″;再由辅助坐标系转轴变到坐标系O'x'y'z',即
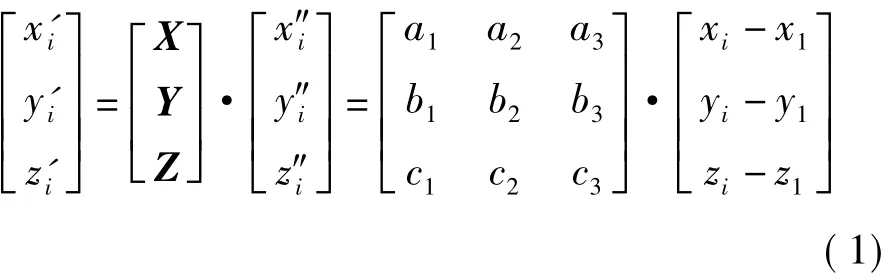
根据以上空间三维直角坐标转换的数学模型,笔者采用计算待定工业测量坐标系的原点在仪器坐标系中的坐标,以及其坐标轴在仪器坐标系中的方向向量来建立工业测量坐标系。
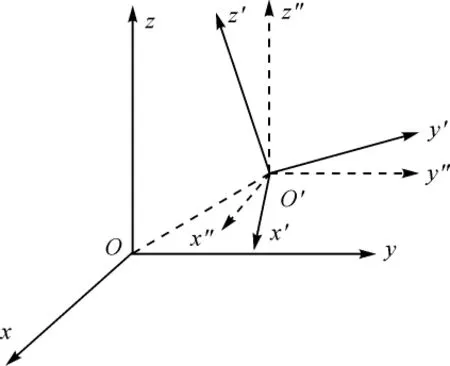
图2 空间直角坐标转换
3.工业测量坐标系的建立
(1)仪器坐标系的建立
全站仪获取的测量数据主要是目标点的斜距s、水平角α和竖直角β,可直接利用这些数据根据几何关系计算出全站仪所在坐标系Oxyz下的各个点的三维坐标。
点 pi(i=1,2,…,i,…,n)在仪器坐标系(右手系)下的三维坐标为
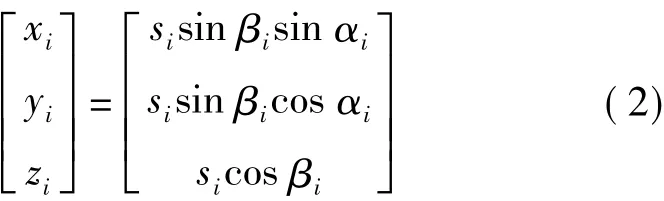
假设测量的前3个点坐标为P1(x1,y1,z1)、P2(x2,y2,z2)、P3(x3,y3,z3)。
(2)移 轴
使仪器坐标系原点O与P1重合,变成辅助坐标系 O″x″y″z″(右手系)。O″x″y″z″坐标系中点 P″i的坐标为
(3)转 轴
计算向量


坐标系O'x'y'z'坐标系的Z轴在Oxyz坐标系下的方向向量垂直于点P1、P2、P3确定的平面。根据右手法则
设

将Z'单位化得

坐标系O'x'y'z'坐标系的Y轴在Oxyz坐标系下的方向向量Y同时垂直于X、Z。根据右手法则

设

将Y'单位化得

将求得的X、Y、Z代入式(1),即可得到目标点在X轴点1、点2,Y轴点3坐标系的坐标。
三、全站仪二次开发
全站仪二次开发主要有3种形式:即机载程序、PDA等掌上电脑与全站仪和电脑与全站仪连接等3种方式。而不同品牌全站仪的不同开发方式也有所不同。
1.PDA与全站仪连接
索佳全站仪在工业测量领域中应用的较早也较为广泛,其二次开发主要是通过字符串指令来控制全站仪进行测量等操作,表1给出其中几种常用的控制指令,图3是笔者参与开发的基于PDA连接电脑的工业测量软件的主界面。
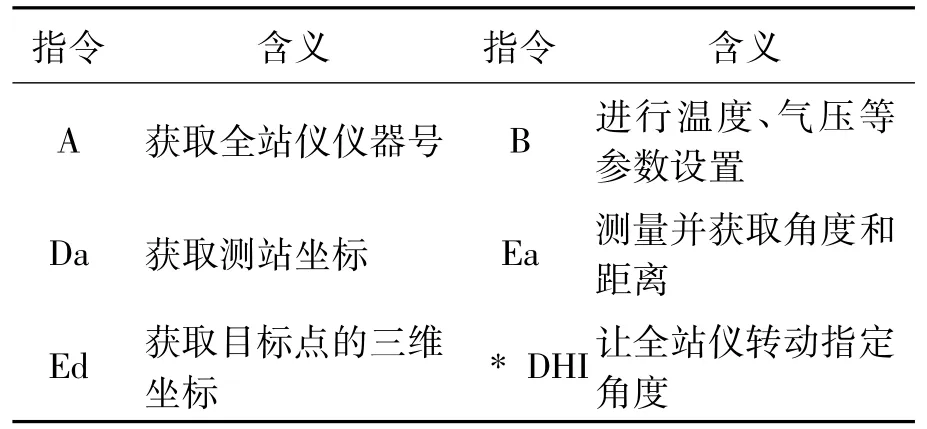
表1 索佳全站仪二次开发几种主要指令及其含义

图3 工业检测软件PDA程序主界面
2.机载程序
机载程序是在测量现场最为方便的操作方式,常常用于免棱镜全站仪的二次开发,拓普康GPT-9000A全站仪是目前免棱镜测距最远的全站仪,在电力测量领域应用广泛,其二次开发形式主要是通过内部指令对全站仪进行控制。图4是笔者参与研发的电力测量软件的主界面。
3.电脑与全站仪连接
这种二次开发方式徕卡全站仪应用的较为广泛,徕卡全自动全站仪采用GeoCOM开发环境,是徕卡公司为全站仪提供的二次开发接口。用户根据工程需要可以利用该接口获取全站仪的状态(如仪器参数、测站坐标、测量模式等)、控制测量机器人的动作(如自动搜寻目标、按照指定角度进行旋转)以及计算测量数据等。
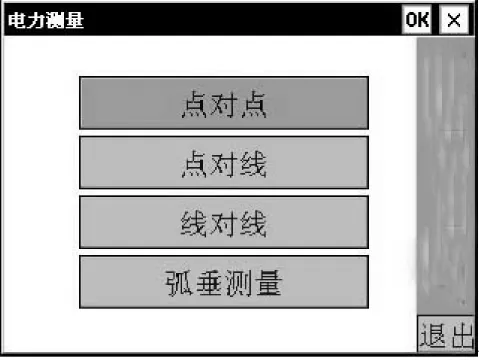
图4 电力测量机载程序主界面
GeoCOM的通信双方是电脑和徕卡全站仪。电脑向全站仪发送指令,同时也接受全站仪返回的数据。而全站仪作为服务器,执行用户通过电脑发送的指令,同时返回执行的结果。电脑与全站仪通过串口通信协议进行通信。对测量人员及开发人员来说,具体实施细节无法了解而且也没有必要了解,开发人员只需在现有的功能上开发适合自己需要的高级功能即可,这也是提供GeoCOM客户端函数包的意义所在。GeoCOM将对全站仪的控制模块分为BAP、AUT、EDM等12个模块。其框架图如图5所示,图6是笔者开发的基于工业电脑连接徕卡智能全站仪的盾构自动引导测量软件的主界面。
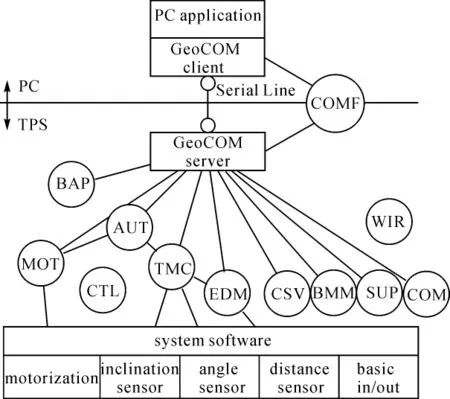
图5 徕卡全站仪GeoCom二次开发框架图
四、结束语
随着制造行业对工业构件精度要求的提高,传统的测量工具及手段已经无法满足实时获取空间三维信息的需要,且一些在现场难以解决的算法在后处理中也耗费大量的时间,全站仪及其免棱镜技术的应用使得企业检测人员可以更加方便快捷地获取特征点的三维数据,而全站仪二次开发技术的应用对企业提高生产效率起到了极大的促进作用。
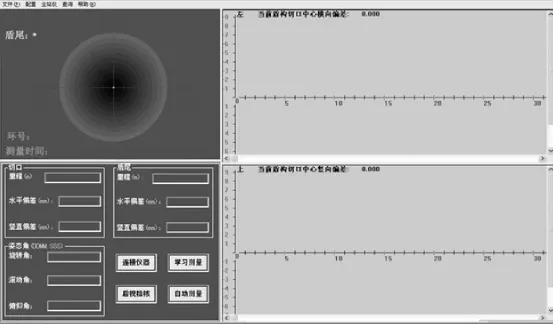
图6 基于电脑连接全站仪的盾构引导测量软件主界面
[1]王智,潘国荣.基于C#的空间任意角度直角坐标转换程序的设计与实现[J].测绘通报,2009(S0):59-61.
[2]王智.地铁盾构姿态自动测量系统的研究与实现[D].上海:同济大学,2011.
[3]孔宁,王智,潘国荣.利用方向余弦建立工业测量坐标系的一种方法[J].工程勘察,2010,38(7):80-83.
[4]金剑锋,王智.罗德里格矩阵在盾构引导系统中的应用研究[J].城市轨道交通研究,2011,14(3):37-39
[5]陈义,沈云中,刘大杰.适用于大旋转角的三维基准转换的一种简便模型[J].武汉大学学报:信息科学版,2004,29(12):1101-1105.
[6]李法礼,韩万围,王智.两点后方交会在工业检测中的应用研究[J].测绘,2010,33(4):176-177.
猜你喜欢
中学生数理化·七年级数学人教版(2022年4期)2022-04-26
中学生数理化·七年级数学人教版(2022年4期)2022-04-26
中学生数理化·七年级数学人教版(2021年4期)2021-07-22
矿产勘查(2020年1期)2020-12-28
水电站设计(2020年4期)2020-07-16
甘肃科技(2020年20期)2020-04-13
工程与建设(2019年3期)2019-10-10
模具制造(2019年3期)2019-06-06
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
制造技术与机床(2017年11期)2017-12-18
